和你一起终身学 习,这里是程序员Android
经典好文推荐,通过阅读本文,您将收获以下知识点:
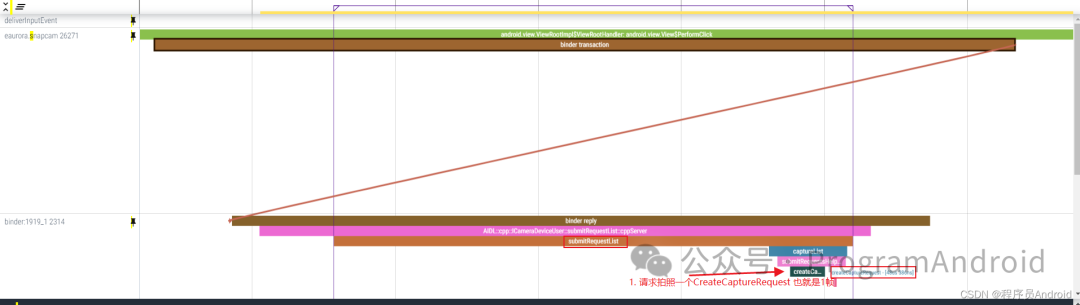
1.deliverInputEvent 拍照点击事件处理

2.submitRequestList Camera 提交拍照请求
3.createCaptureRequest 拍照请求帧数
骁龙相机通过binder 数据传输下发的拍照请求
-
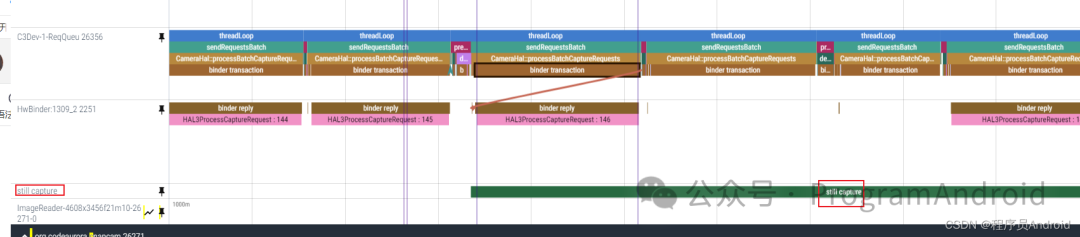
4.still capture 下发拍照请求到返回拍照帧
-
5.sendRequestsBatch 下发拍照请求
-
6.CameraHal::processBatchCaptureRequests通过Hwbinder 跟camera hal 通信
-
7.HAL3ProcessCaptureRequest : 146 通过camera hal trace 可以看到拍照请求帧的帧号
-
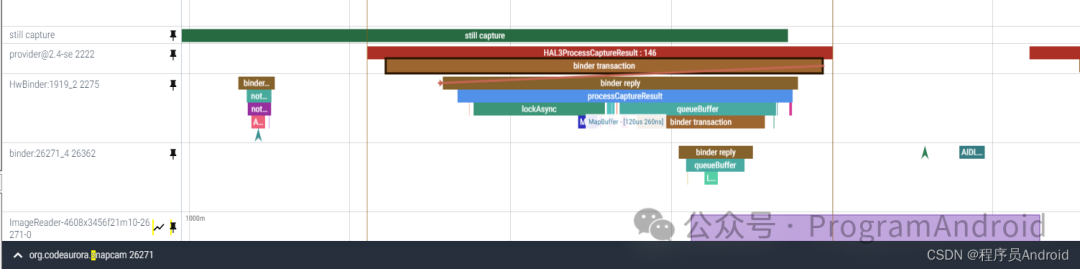
8.HAL3ProcessCaptureResult:146 返回帧callback 到camera fwk 层
-
9.processCaptureResult fwk接收到返回帧,并通过binder 返回给相机app
-
10.queueBuffer 相机app 接受到buffer 后通过queuebuffer 将拍照帧存放到ImageReader中
-
11.ImageReader 存放返回帧,供app合成处理并保存压jpeg图片
参考文献:
-
【腾讯文档】Camera学习知识https://docs.qq.com/doc/DSWZ6dUlNemtUWndv
至此,本篇已结束。转载网络的文章,小编觉得很优秀,欢迎点击阅读原文,支持原创作者,如有侵权,恳请联系小编删除,欢迎您的建议与指正。同时期待您的关注,感谢您的阅读,谢谢!
 点击阅读原文,为大佬点赞!
点击阅读原文,为大佬点赞!