串口实验
-
- 51单片机串口实验
-
- [1. 软硬件条件](#1. 软硬件条件)
- [2. 串口实验](#2. 串口实验)
-
- [2.1 单片机与PC 发送字符](#2.1 单片机与PC 发送字符)
-
- [2.1.1 效果](#2.1.1 效果)
- [2.1.2 代码](#2.1.2 代码)
- [2.1.3 优化](#2.1.3 优化)
- [2.3 串口接收数据(指令控制单片机)](#2.3 串口接收数据(指令控制单片机))
-
- [2.3.1 非中断方式实现](#2.3.1 非中断方式实现)
- [2.3.2 中断方式实现](#2.3.2 中断方式实现)
51单片机串口实验
1. 软硬件条件
- 单片机型号:STC89C52RC
- 开发环境:KEIL4
- 烧录软件串口通信软件:stc-isp
2. 串口实验
实现单片机与PC 串口通信,能够通过PC 输入指令 控制单片机。
2.1 单片机与PC 发送字符
2.1.1 效果
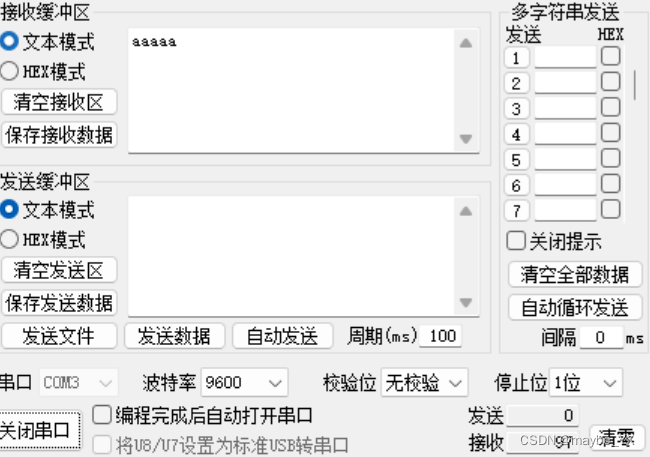
2.1.2 代码
c
#include "reg52.h"
#include <intrins.h>
sbit testLed = P3^7;
sfr AUXR = 0x8E; // 屏蔽电磁干扰
void UartInit(){
PCON &= 0x7F; // 不倍速 不倍速甚至可以不用设置
SCON = 0x40; // REN 不是能
TMOD &= 0x0F;
TMOD |= 0x20; // 8位自动重装
TL1 = 0xFD; //设定定时初值
TH1 = 0xFD; //设定定时器重装值
ET1 = 0; // 禁止定时器1溢出申请中断
EA = 1;
TR1 = 1; //启动定时器1
}
void Delay1000ms() //@11.0592MHz
{
unsigned char i, j, k;
_nop_();
i = 8;
j = 1;
k = 243;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void init(){
UartInit();
testLed = 1;
testLed = 0;
Delay1000ms();
}
void main(){
char msg = 'a';
init();
while(1){
SBUF = msg; // 写入缓存区
testLed = !testLed;
Delay1000ms(); // 延迟用于 为传输数据预留时间
}
}2.1.3 优化
不采用延迟方式,采用标志位判断是否发送成功,并且发送字符串。
c
#include "reg52.h"
#include <intrins.h>
sbit testLed = P3^7;
sfr AUXR = 0x8E; // 屏蔽电磁干扰
void UartInit(){
PCON &= 0x7F; // 不倍速 不倍速甚至可以不用设置
SCON = 0x40; // REN 不是能
TMOD &= 0x0F;
TMOD |= 0x20; // 8位自动重装
TL1 = 0xFD; //设定定时初值
TH1 = 0xFD; //设定定时器重装值
ET1 = 0; // 禁止定时器1溢出申请中断
EA = 1;
ES = 1;
TR1 = 1; //启动定时器1
}
void Delay1000ms() //@11.0592MHz
{
unsigned char i, j, k;
_nop_();
i = 8;
j = 1;
k = 243;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void init(){
UartInit();
testLed = 1;
testLed = 0;
Delay1000ms();
}
void sendByte(char msg){
SBUF = msg;
while(!TI);
TI = 0;
}
void sendString(char *str){
while(*str!='\0'){
sendByte(*str);
str++;
}
}
void main(){
init();
while(1){
sendString("hello world\r\n");
testLed = !testLed;
Delay1000ms();
}
}2.3 串口接收数据(指令控制单片机)
2.3.1 非中断方式实现
主要时查询法检测RI标志位是否被置1 ,注意软件置0.
c
#include "reg52.h"
#include <intrins.h>
sbit testLed = P3^7;
sfr AUXR = 0x8E; // 屏蔽电磁干扰
char cmd;
void UartInit(){
PCON &= 0x7F; // 不倍速 不倍速甚至可以不用设置
SCON = 0x50;
TMOD &= 0x0F;
TMOD |= 0x20; // 8位自动重装
TL1 = 0xFD; //设定定时初值
TH1 = 0xFD; //设定定时器重装值
ET1 = 0; // 禁止定时器1溢出申请中断
EA = 1;
ES = 1;
TR1 = 1; //启动定时器1
}
void Delay1000ms() //@11.0592MHz
{
unsigned char i, j, k;
_nop_();
i = 8;
j = 1;
k = 243;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void sendByte(char msg){
SBUF = msg;
while(!TI);
TI = 0; // 只是中断标志 但是没有中断函数 则不会触发中断 有中断函数时需要及时置0
}
void sendString(char *str){
while(*str!='\0'){
sendByte(*str);
str++;
}
}
void init(){
UartInit();
testLed = 0;
Delay1000ms();
}
void main(){
init();
while(1){
if(RI){
cmd = SBUF;
if(cmd == 'o'){
testLed = 0;
}
else if(cmd == 'c'){
testLed = 1;
}
RI= 0;
}
}
}2.3.2 中断方式实现
c
#include "reg52.h"
#include <intrins.h>
#include <string.h>
#define SIZE 3
sbit testLed = P3^7;
sbit testLed2 = P3^6;
sfr AUXR = 0x8E; // 屏蔽电磁干扰
char cmd[SIZE];
void UartInit(){
PCON &= 0x7F; // 不倍速 不倍速甚至可以不用设置
SCON = 0x50;
TMOD &= 0x0F;
TMOD |= 0x20; // 8位自动重装
TL1 = 0xFD; //设定定时初值
TH1 = 0xFD; //设定定时器重装值
ET1 = 0; // 禁止定时器1溢出申请中断
EA = 1;
ES = 1;
TR1 = 1; //启动定时器1
}
void Delay1000ms() //@11.0592MHz
{
unsigned char i, j, k;
_nop_();
i = 8;
j = 1;
k = 243;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void sendByte(char msg){
SBUF = msg;
while(!TI);
TI = 0; // 只是中断标志 但是没有中断函数 则不会触发中断 有中断函数时需要及时置0
}
void sendString(char *str){
while(*str!='\0'){
sendByte(*str);
str++;
}
}
void init(){
UartInit();
testLed = 0;
testLed2 = 1;
Delay1000ms();
}
void main(){
init();
while(1){
sendString("Hello World!\r\n");
testLed = !testLed;
Delay1000ms();
}
}
void UartHandler() interrupt 4{
static int i = 0;
char tmp;
if(RI){
RI = 0;
tmp = SBUF;
if(tmp == 'o' || tmp == 'c'||i==SIZE){
i = 0;
}
cmd[i++] = tmp;
if(cmd[0] == 'o' && cmd[1] == 'p'){
testLed2 = 0;
memset(cmd,'\0',SIZE);
}
if(cmd[0] == 'c' && cmd[1] == 'l'){
testLed2 = 1;
memset(cmd,'\0',SIZE);
}
}
if(TI);
}