Swallow(ESD)软件的ETABS功能介绍
来源:https://www.food4rhino.com/app/swallowesd
文章目录
- Swallow(ESD)软件的ETABS功能介绍
-
-
- [1. Load模块](#1. Load模块)
-
- [1.1 Support节点支座](#1.1 Support节点支座)
- [1.2 LoadPattern荷载模式](#1.2 LoadPattern荷载模式)
- [1.3 LoadPattByName引用模型荷载模式](#1.3 LoadPattByName引用模型荷载模式)
- [1.4 AutoWindChinese自动风荷载参数](#1.4 AutoWindChinese自动风荷载参数)
- [1.5 ResponseFuncChinese反应谱函数](#1.5 ResponseFuncChinese反应谱函数)
- [1.6 ResponseCase反应谱工况](#1.6 ResponseCase反应谱工况)
- [1.7 Modal模态工况](#1.7 Modal模态工况)
- [1.8 RespCombo荷载组合(linear)](#1.8 RespCombo荷载组合(linear))
- [1.9 JointLoad节点荷载](#1.9 JointLoad节点荷载)
- [1.10 LineLoad线荷载](#1.10 LineLoad线荷载)
- [1.11 ShellLoad面荷载](#1.11 ShellLoad面荷载)
- [2. Section模块](#2. Section模块)
-
- [2.1 CroSec框架截面](#2.1 CroSec框架截面)
- [2.2 RebarAttr截面配筋属性](#2.2 RebarAttr截面配筋属性)
- [2.3 CroSecByName引用模型截面](#2.3 CroSecByName引用模型截面)
- [2.4 Cross Section View截面显示](#2.4 Cross Section View截面显示)
- [2.5 AreaSection面截面](#2.5 AreaSection面截面)
- [2.6 AreaSecByName引用模型面截面](#2.6 AreaSecByName引用模型面截面)
- [3. Model模块](#3. Model模块)
-
- [3.1 Floor楼层属性](#3.1 Floor楼层属性)
- [3.2 FramseObj生成框架单元](#3.2 FramseObj生成框架单元)
- [3.3 LocalCoordinateAxis局部坐标系](#3.3 LocalCoordinateAxis局部坐标系)
- [3.4 MeshObj根据mesh生成壳单元](#3.4 MeshObj根据mesh生成壳单元)
- [3.5 Model Assemble模型组装](#3.5 Model Assemble模型组装)
- [4. Etabs](#4. Etabs)
-
- [4.1 SendToEtabs](#4.1 SendToEtabs)
- [4.2 ImportEtabsModel](#4.2 ImportEtabsModel)
- [4.3 SynToEtabs](#4.3 SynToEtabs)
- [4.4 EtabsAddFloor发送楼层属性](#4.4 EtabsAddFloor发送楼层属性)
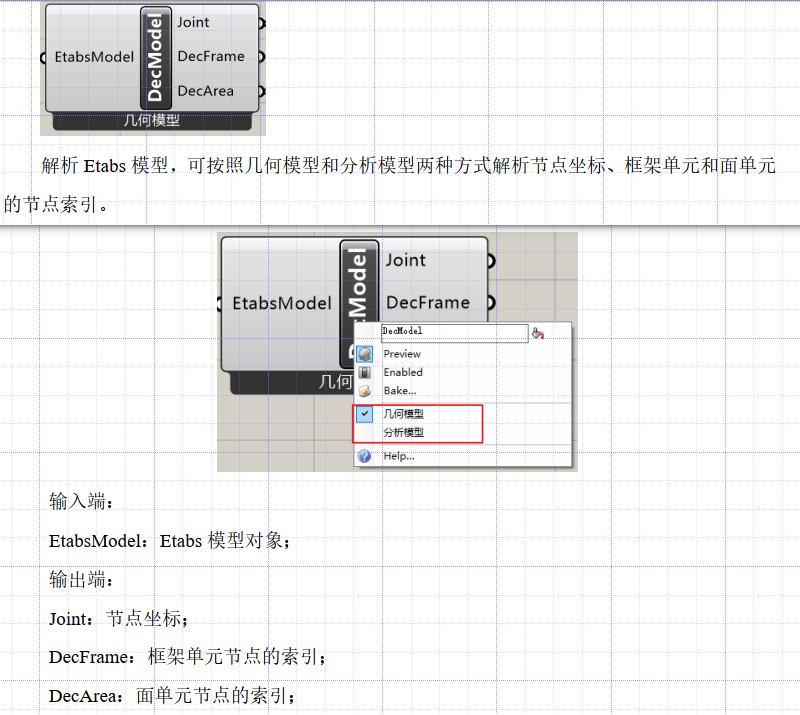
- [4.5 EtabsDeconstructModel](#4.5 EtabsDeconstructModel)
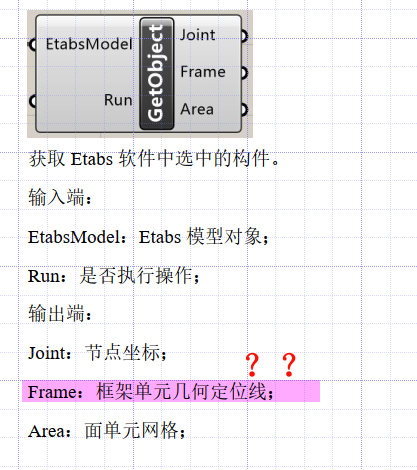
- [4.6 EtabsGetObject](#4.6 EtabsGetObject)
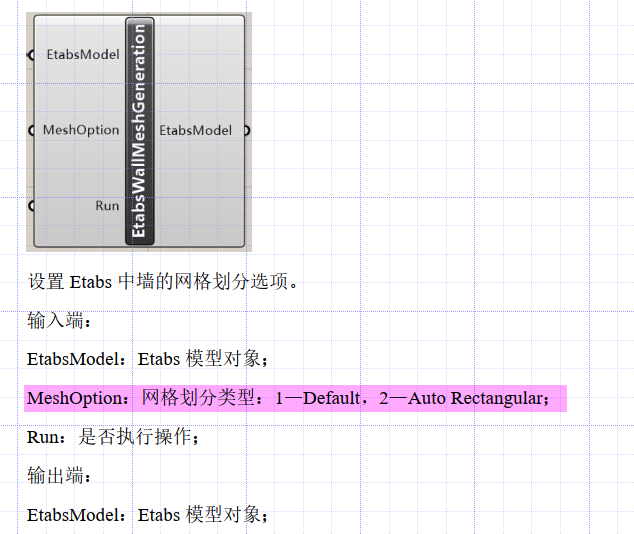
- [4.7 EtabsWallMeshGeneration](#4.7 EtabsWallMeshGeneration)
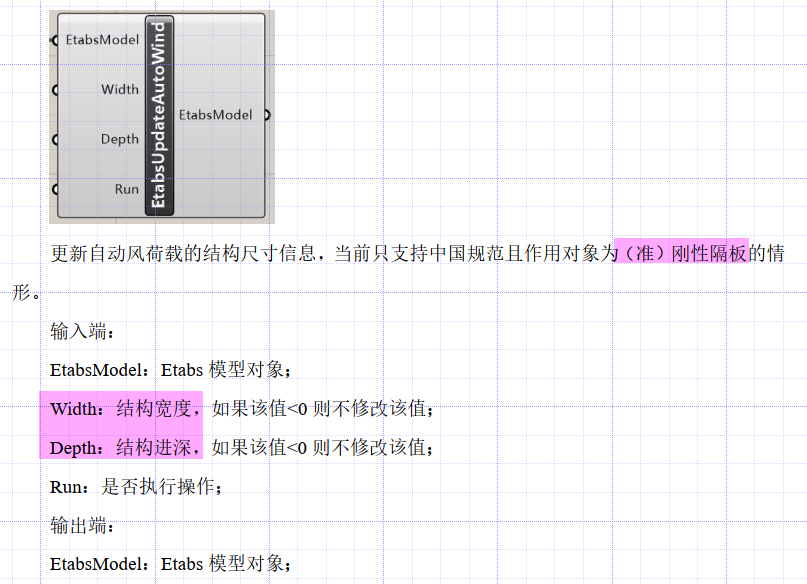
- [4.8 EtabsUpdateAutoWind](#4.8 EtabsUpdateAutoWind)
- [4.9 EtabsChangeSection](#4.9 EtabsChangeSection)
- [4.10 EtabsAnalyze](#4.10 EtabsAnalyze)
- [4.11 EtabsGetTableforDisplay](#4.11 EtabsGetTableforDisplay)
- [5. 案例](#5. 案例)
-
1. Load模块
1.1 Support节点支座
定义节点支座,在指定节点上设置约束方向。支持设置x、y、z三个方向的平动约束以及三个方向的绕轴转动约束。
- 输入端 :
Pt:输入需要设置支座的节点
- 输出端 :
Info:支座约束信息Supp:输出节点支座
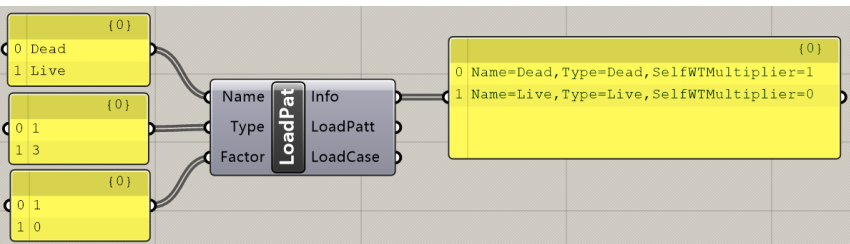
1.2 LoadPattern荷载模式
定义荷载模式,并定义一个同名的"linear Static"类型的荷载工况。
-
输入端:
Name:荷载模式名称Type:荷载模式类型,通过输入数字1到8选择类型Factor:自重系数
-
输出端:
Info:荷载模式信息LoadPatt:输出荷载模式LoadCase:输出荷载工况
1.3 LoadPattByName引用模型荷载模式
通过名称引用ETABS中已定义的荷载模式,需在ETABS软件中预先定义对应名称的荷载模式。
- 输入端 :
Name:引用的荷载模式名称
- 输出端 :
LoadPatt:荷载模式
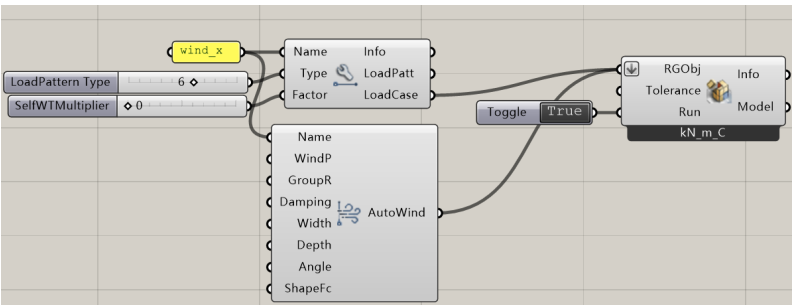
1.4 AutoWindChinese自动风荷载参数
根据中国规范设置自动风荷载相应参数,当前只对ETABS软件有效。
-
输入端:
Name:已定义的风荷载名称LoadCase:基本风压(kN/m²)GroupR:地面粗糙度1-A,2-B,3-C,4-DDamping:阻尼比Width:结构宽度,如果该值<0则采用软件自动计算值;Depth:结构进深,如果该值<0则采用软件自动计算值;Angle:方向角(度)ShapeFc:体形系数
-
输出端:
AutoWind:自动风荷载参数
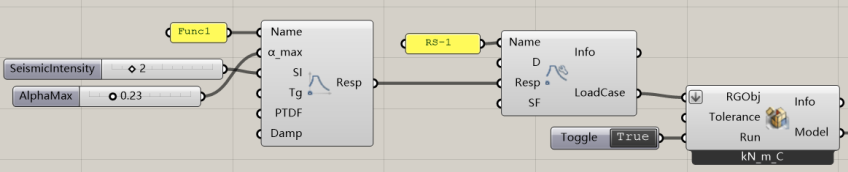
1.5 ResponseFuncChinese反应谱函数
根据中国规范定义反应谱函数。
- 输入端 :
Name:名称α_max:地震影响系数最大值SI:地震设防烈度Tg:场地特征周期PTDF:周期折减系数Damp:阻尼比
- 输出端 :
Resp:反应谱函数
1.6 ResponseCase反应谱工况
定义反应谱工况。
-
输入端:
Name:工况名称D:作用方向1-U1,2-U2,3-U3,4-R1,5-R2,6-R3;Resp:反应谱函数SF:比例系数
-
输出端:
Info:反应谱工况信息LoadCase:荷载工况
1.7 Modal模态工况
定义模态工况。
- 输入端 :
Name:名称MaxMod:最大模态数量
- 输出端 :
Modal:模态工况
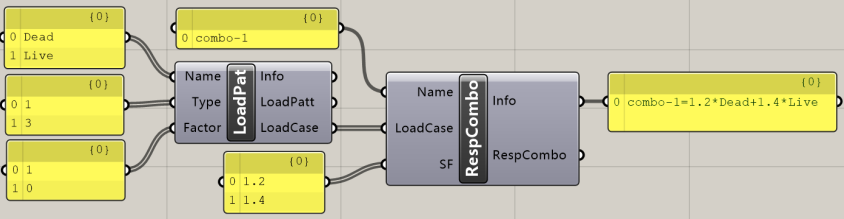
1.8 RespCombo荷载组合(linear)
定义荷载组合,仅支持线性叠加类型。
-
输入端:
Name:荷载组合名称LoadCase:荷载工况SF:组合系数
-
输出端:
Info:荷载组合信息RespCombo:输出荷载组合
使用该电池前需先用"LoadPatterm"等电池定义荷载工况,用法如下图所示:
1.9 JointLoad节点荷载
在指定节点上施加节点荷载。
- 输入端 :
Pt:需要施加荷载的节点LoadPatt:荷载模式,输入由"LoadPattern"电池定义并输出的荷载模式:Dire:荷载方向- Value:荷载值大小;
- 输出端:
- Info:节点荷载信息;
- Load:输出节点荷载:
1.10 LineLoad线荷载
定义线性荷载,适用于梁等线性构件。
- 输入端 :
- LoadPatt:荷载模式,输入由"LoadPattern"电池定义并输出的荷载模式:
- Domain:杆件上需要施加荷载的范围,由杆件的相对距离定义,如"0to1"表示在整个杆件上施加荷载。
Dire:荷载方向- Value1:起点处荷载值大小;
- Value2:终点处荷载值大小;
- 输出端 :
Info:线性荷载信息LineLoad:输出线性荷载
1.11 ShellLoad面荷载
定义面荷载,适用于板、墙等面构件。
- 输入端 :
Shell:需要施加荷载的面构件LoadPatt:荷载模式Dire:荷载方向- Value: 起点处荷载值大小;
- 输出端 :
Info:面荷载信息ShellLoad:输出面荷载
2. Section模块
2.1 CroSec框架截面
定义框架截面形式,包括:
-
圆管型 (Pipe)
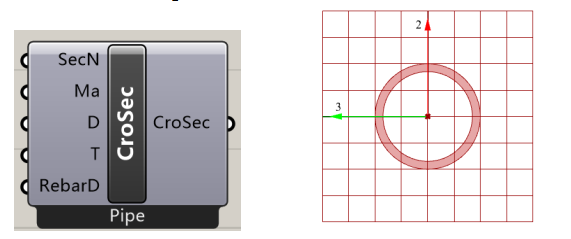
- 输入端:
- SecN:截面名称;
- Ma:截面材料,以文本格式输入,如"Q345"、"C30"等:
- D:外直径;T:圆管壁厚;
- RebarD:配筋数据,该参数仅对混凝土截面有效;
- 输出端:
- CroSec:输出框架截面;
-
实心圆型 (Circle)

- 输入端:
- SecN:截面名称;
- Ma:截面材料,以文本格式输入,如"Q345"、"C30"等:
- D:直径;RebarD:
- 配筋数据,该参数仅对混凝土截面有效;
- 输出端:
- CroSec:输出框架截面;
-
矩形 (Rectangle)
-
箱型 (Tube)
-
工字型 (I_Shape)
-
T型 (T_Shape)
-
L型(角钢)(Angle_L)
-
双角钢 (DbAngle)
-
槽钢 (Channel)
-
双槽钢 (DbChannel)
-
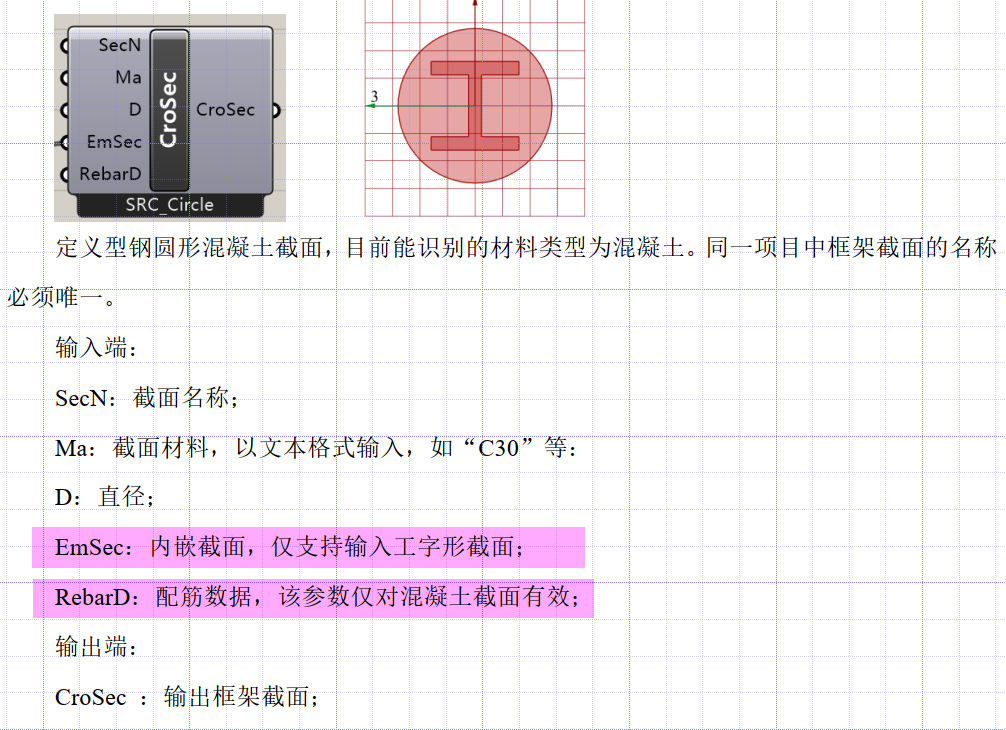
钢筋混凝土圆形截面 (SRC_Circle)
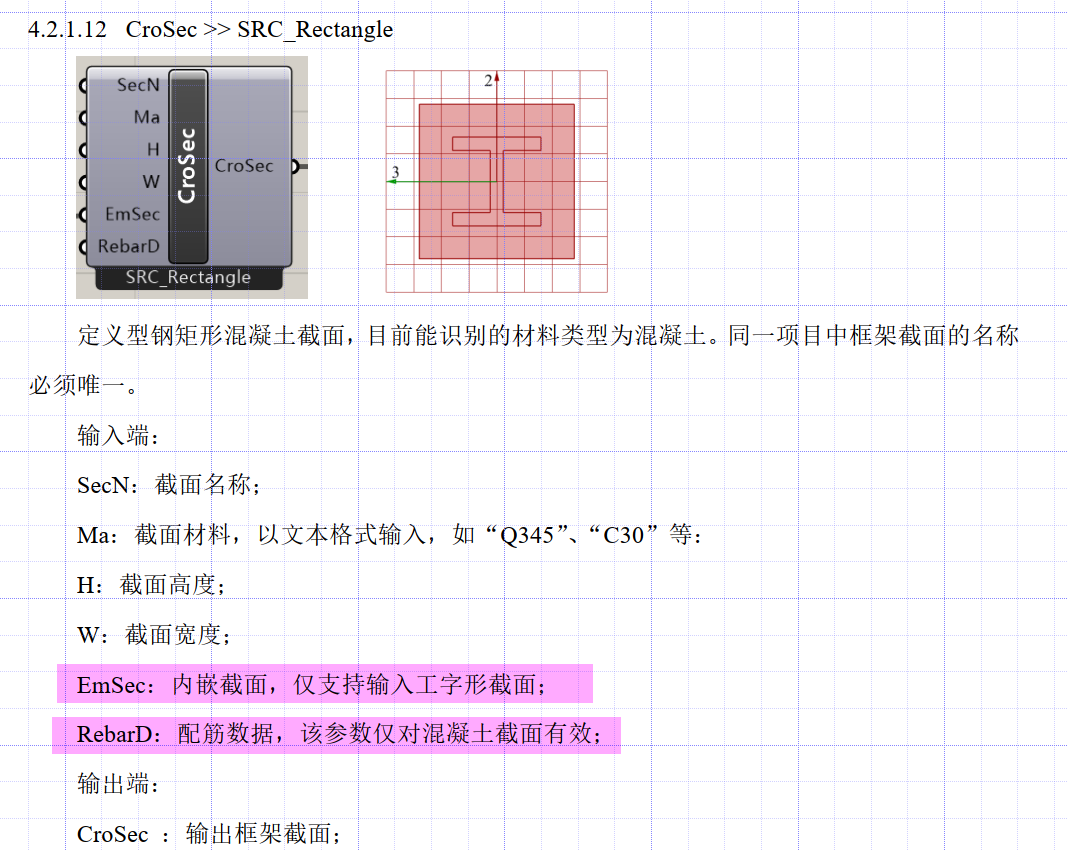
- 钢筋混凝土矩形截面 (SRC_Rectangle)
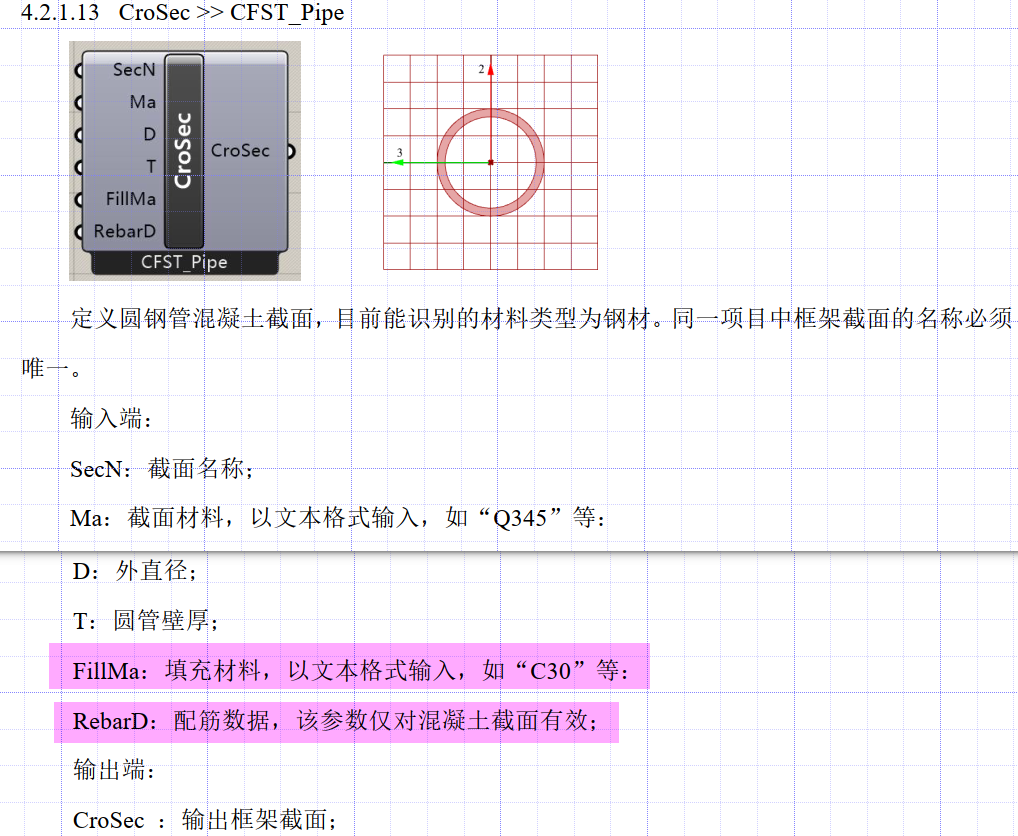
- 混凝土填充钢管圆形截面 (CFST_Pipe)
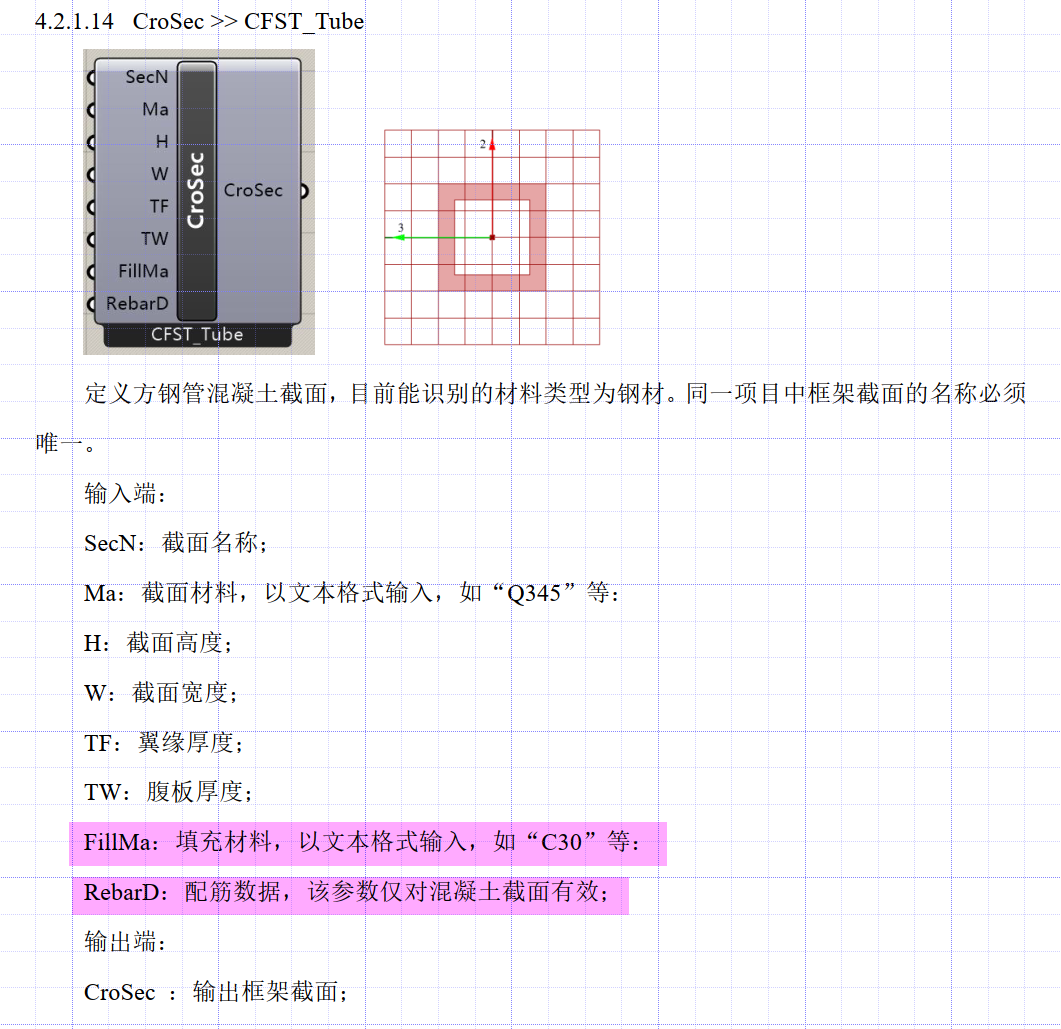
- 混凝土填充钢管矩形截面 (CFST_Tube)
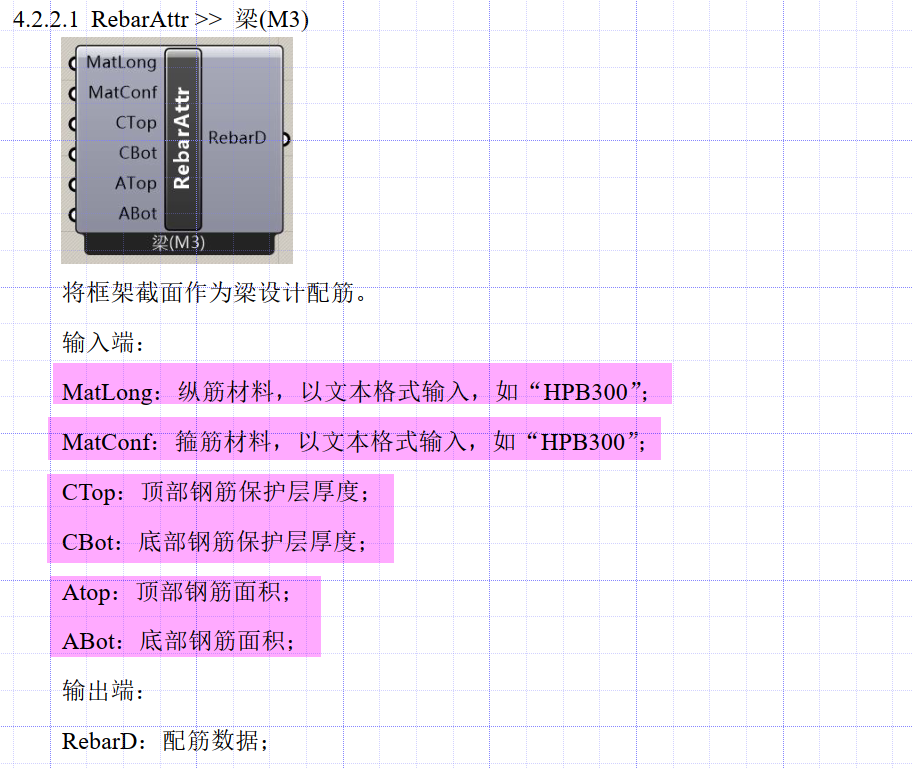
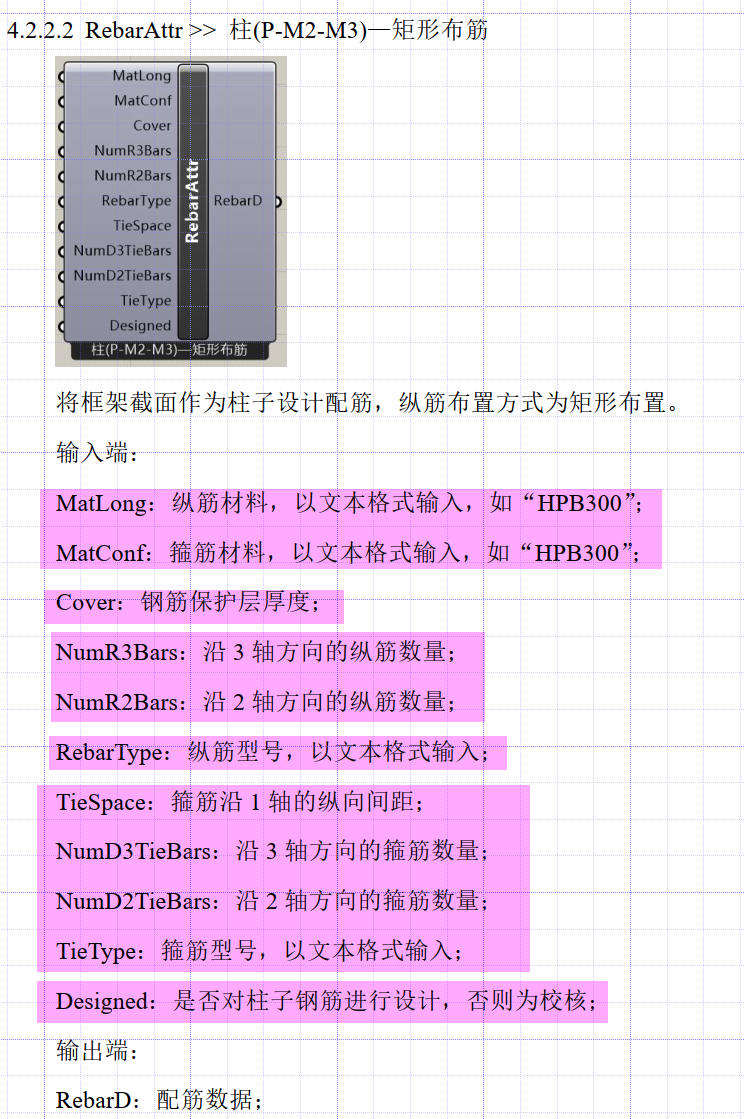
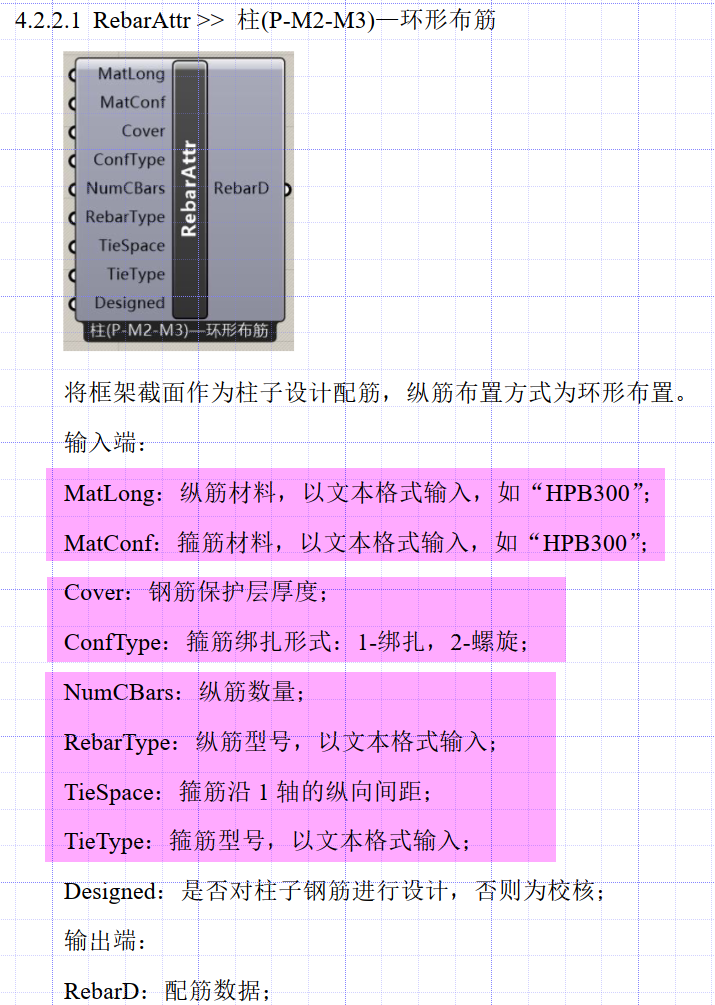
2.2 RebarAttr截面配筋属性
该电池用于定义混凝土截面配筋数据,根据设计类型和钢筋布置方式分为三种类型:
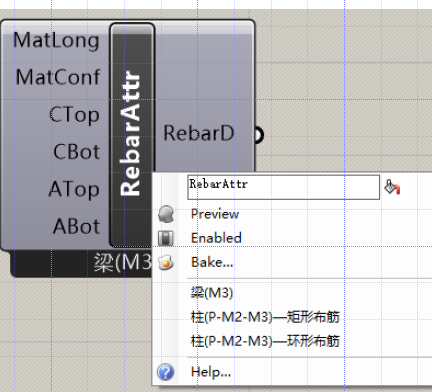
- 梁
- 柱一矩形布筋
- 柱一环形布筋
在该电池上通过鼠标右键的下拉菜单来选择类型,如下图所示:
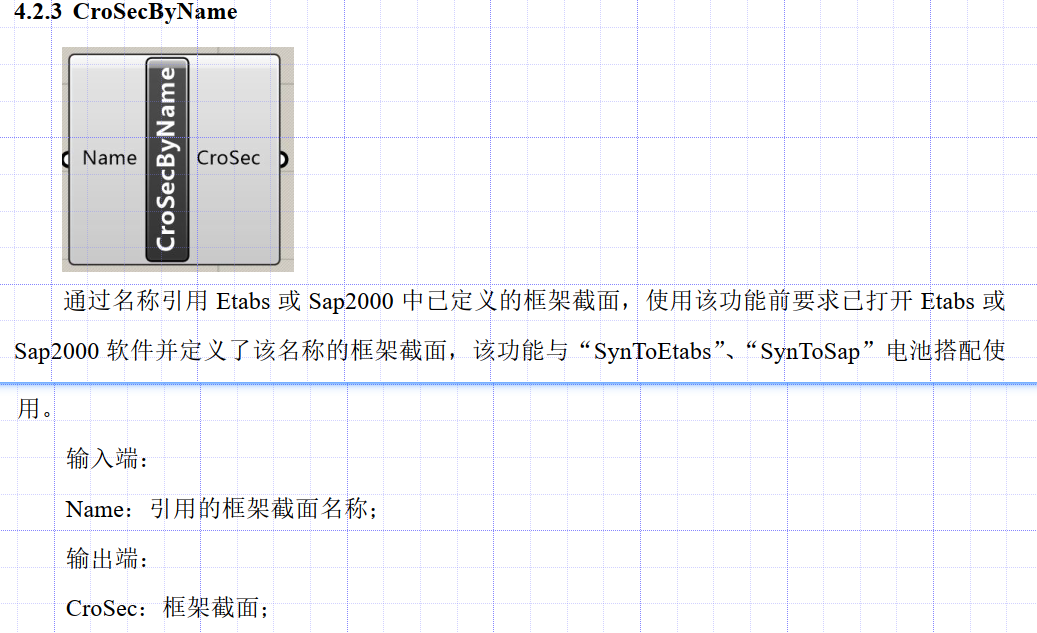
2.3 CroSecByName引用模型截面
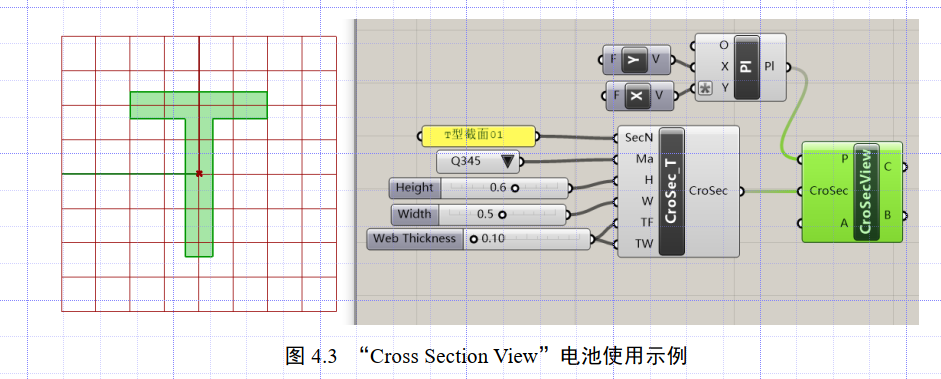
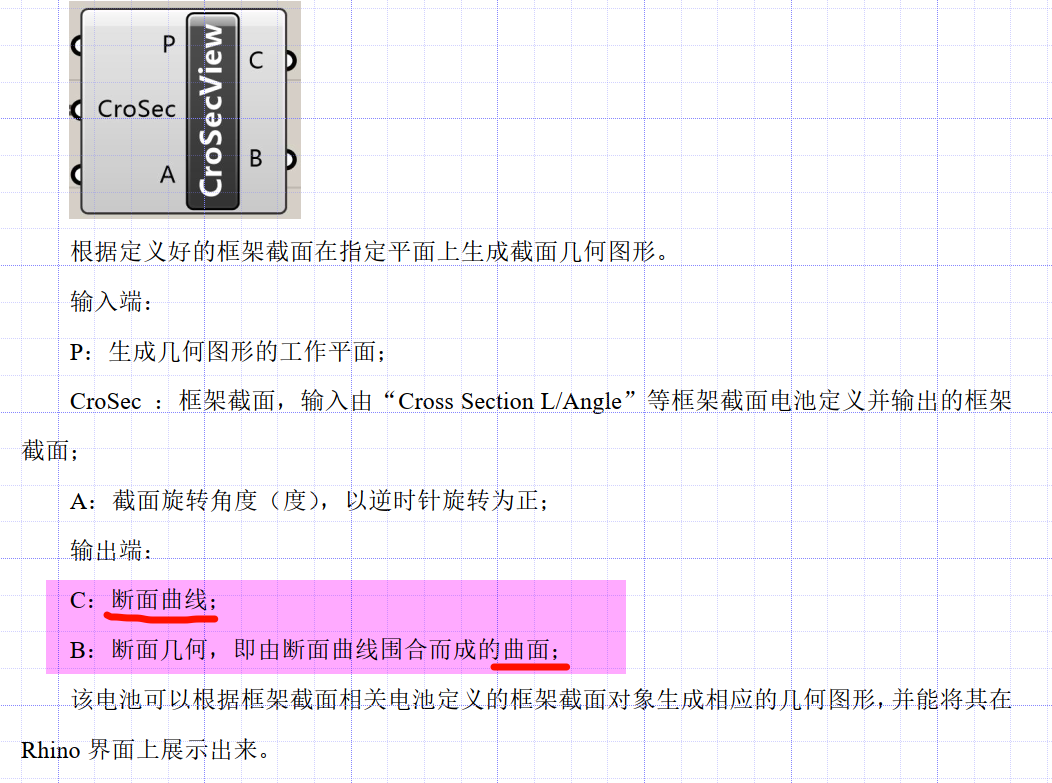
2.4 Cross Section View截面显示
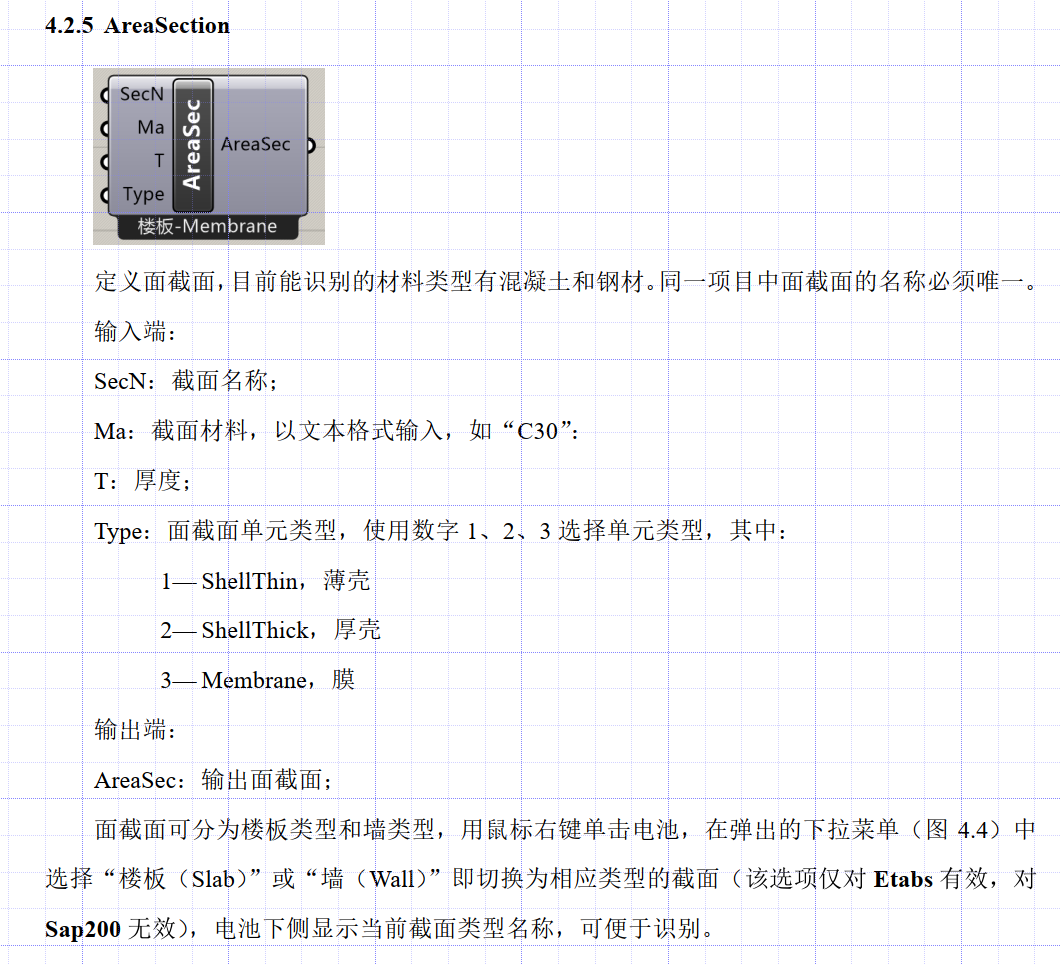
2.5 AreaSection面截面

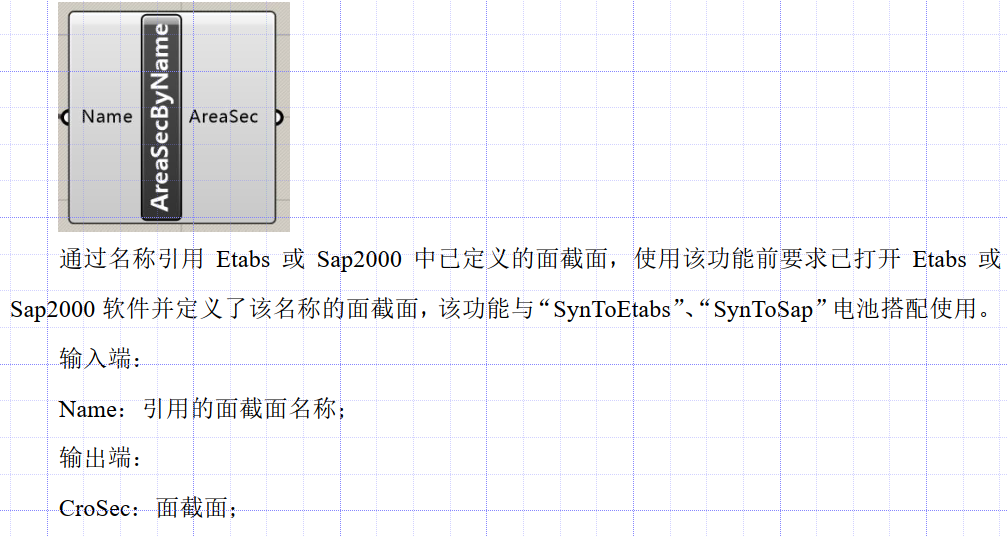
2.6 AreaSecByName引用模型面截面
3. Model模块
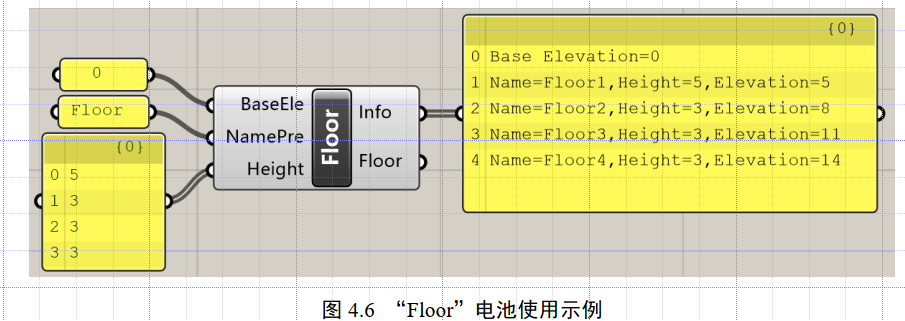
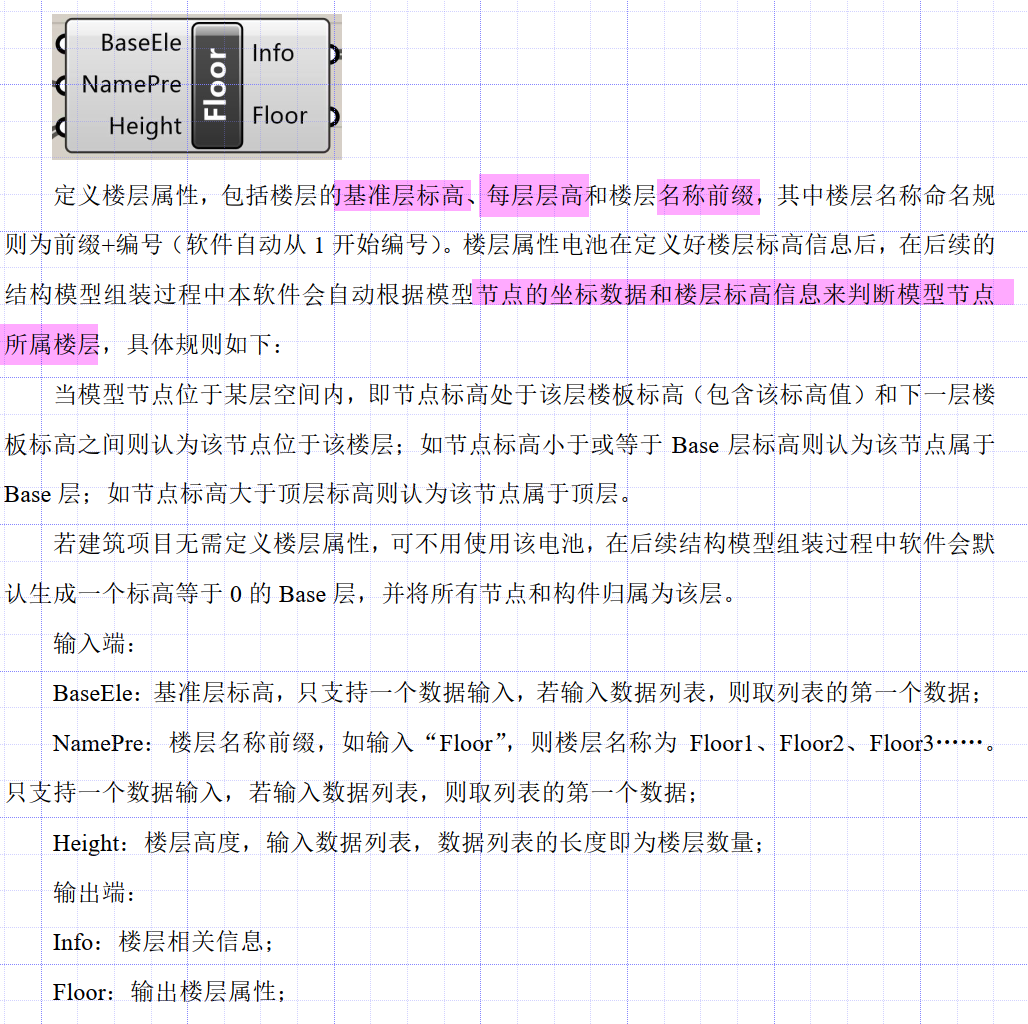
3.1 Floor楼层属性
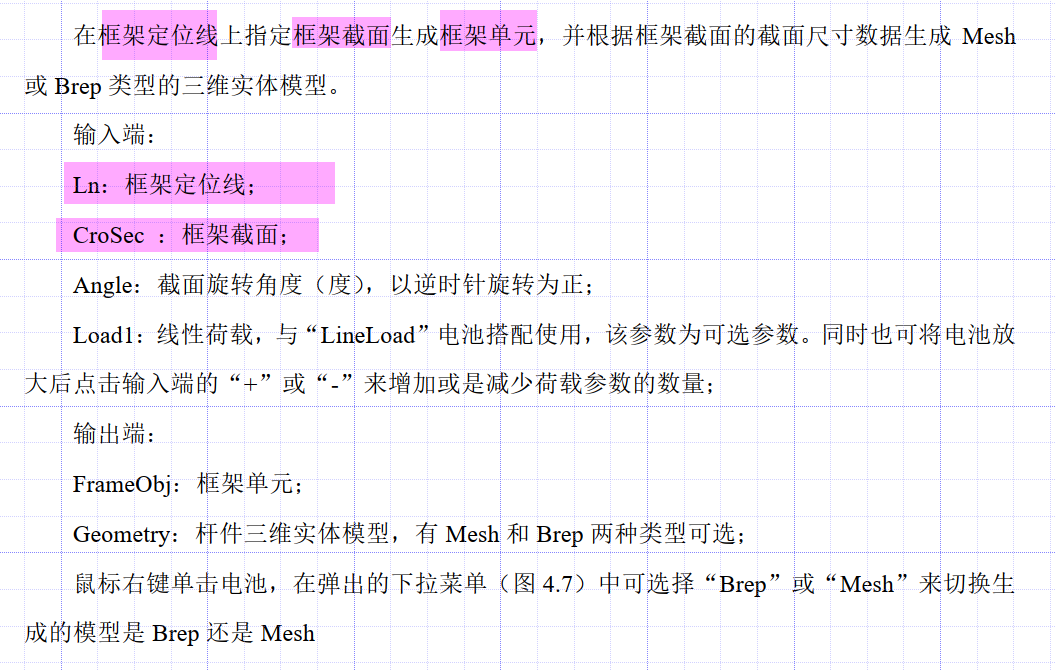
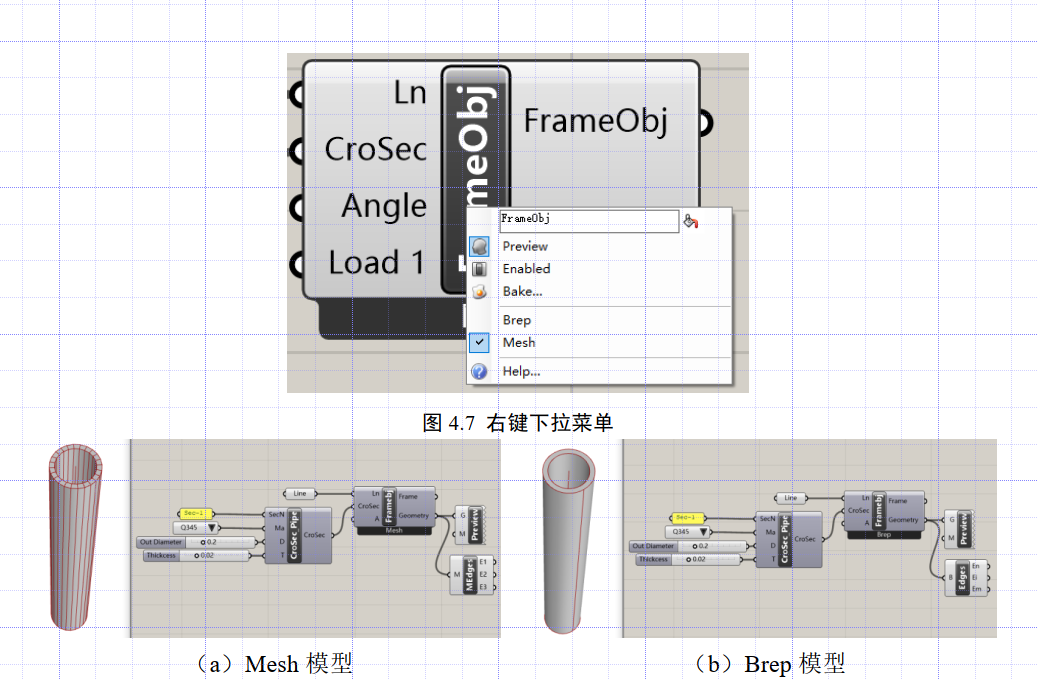
3.2 FramseObj生成框架单元
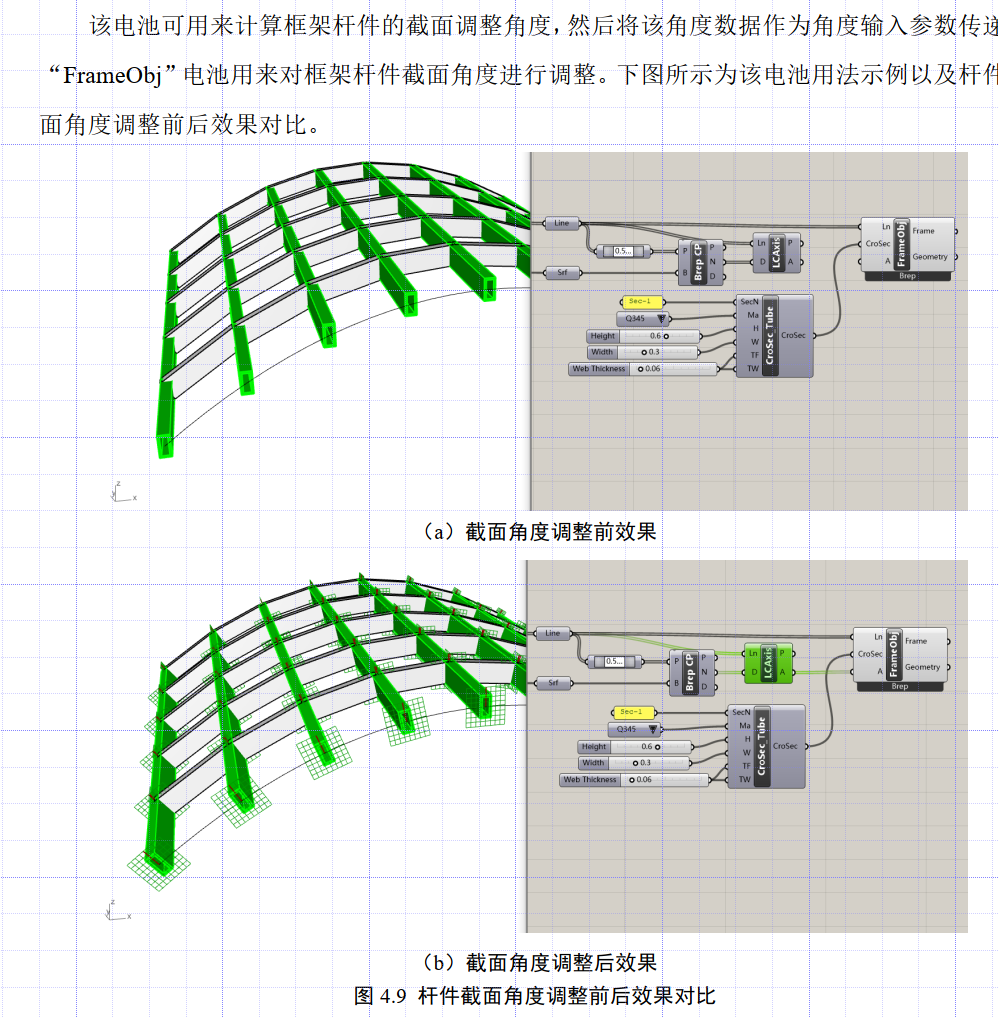
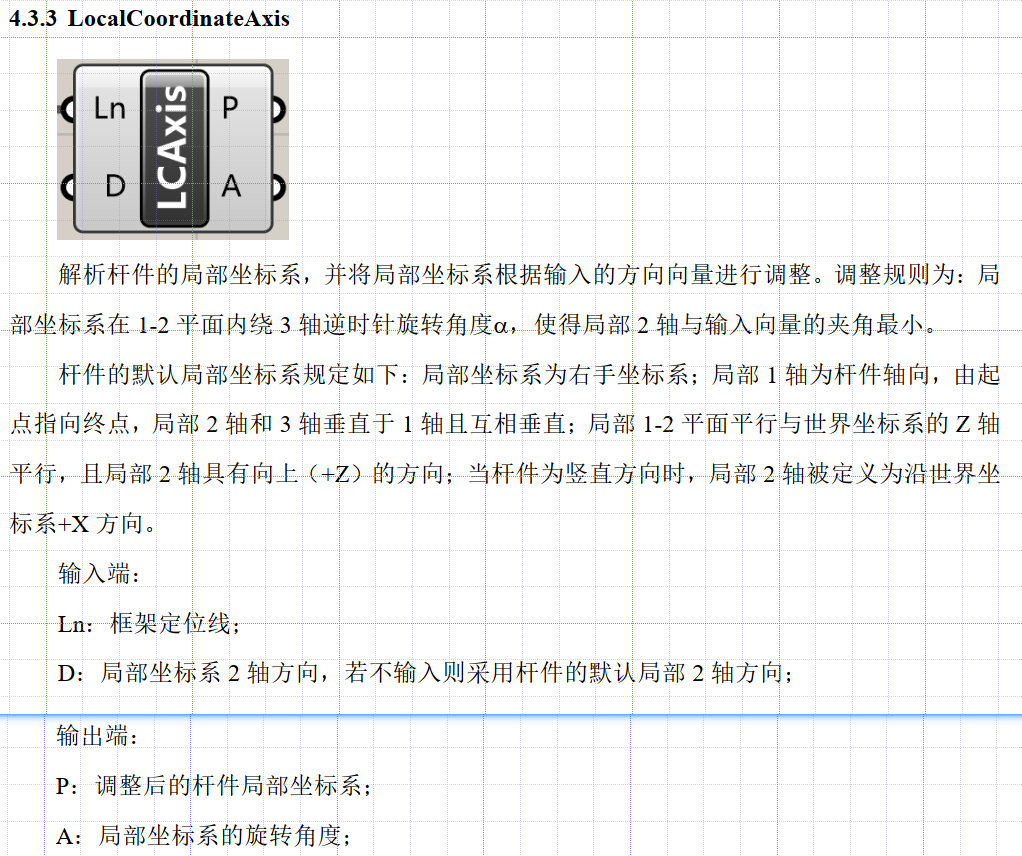
3.3 LocalCoordinateAxis局部坐标系
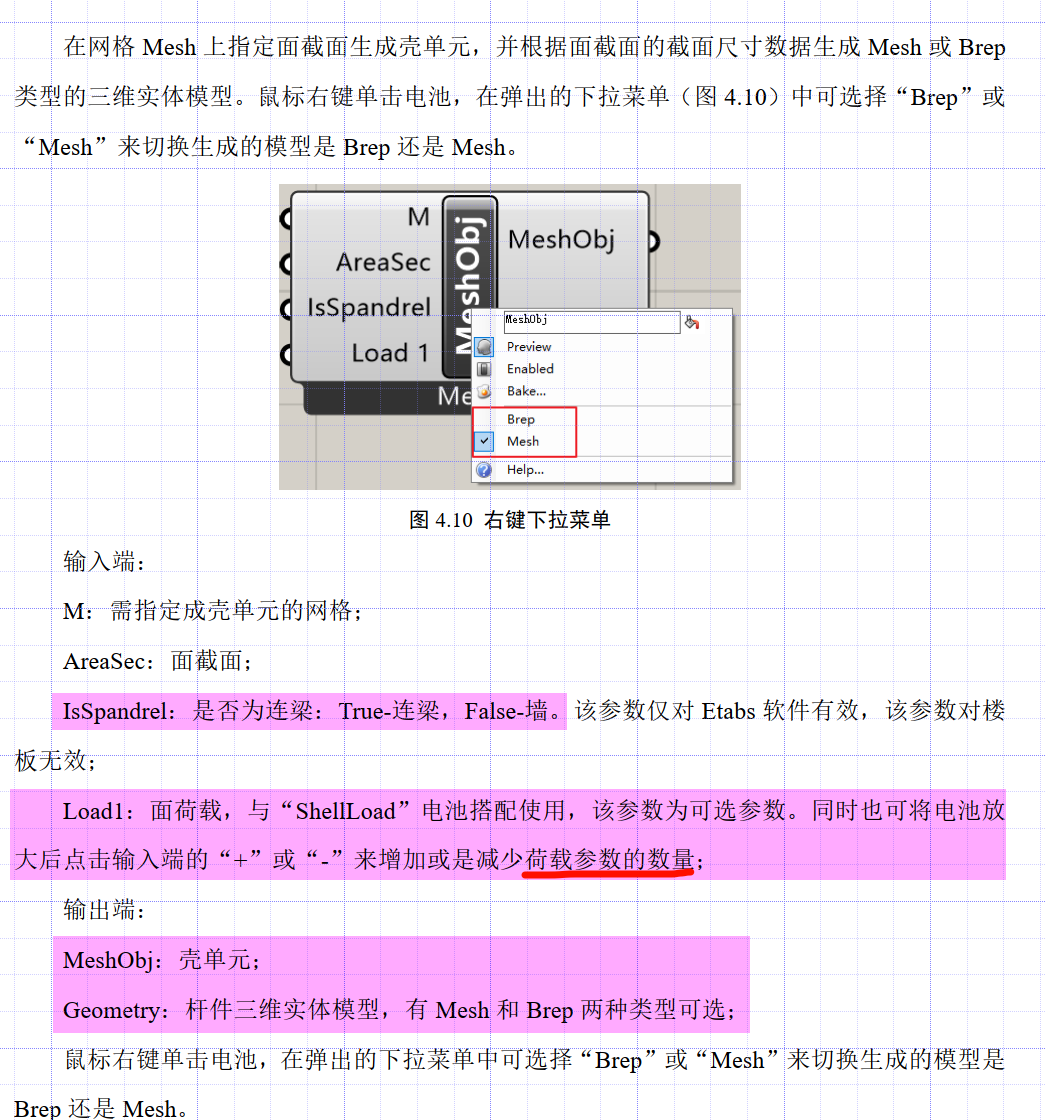
3.4 MeshObj根据mesh生成壳单元
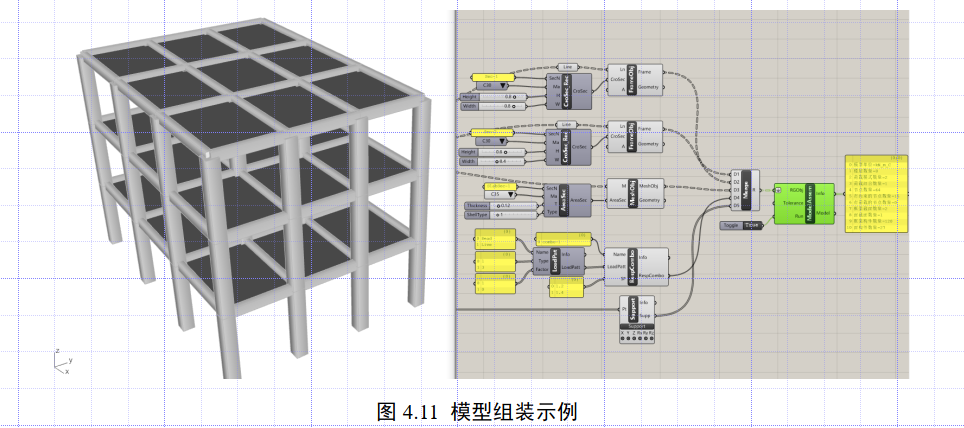
3.5 Model Assemble模型组装

4. Etabs
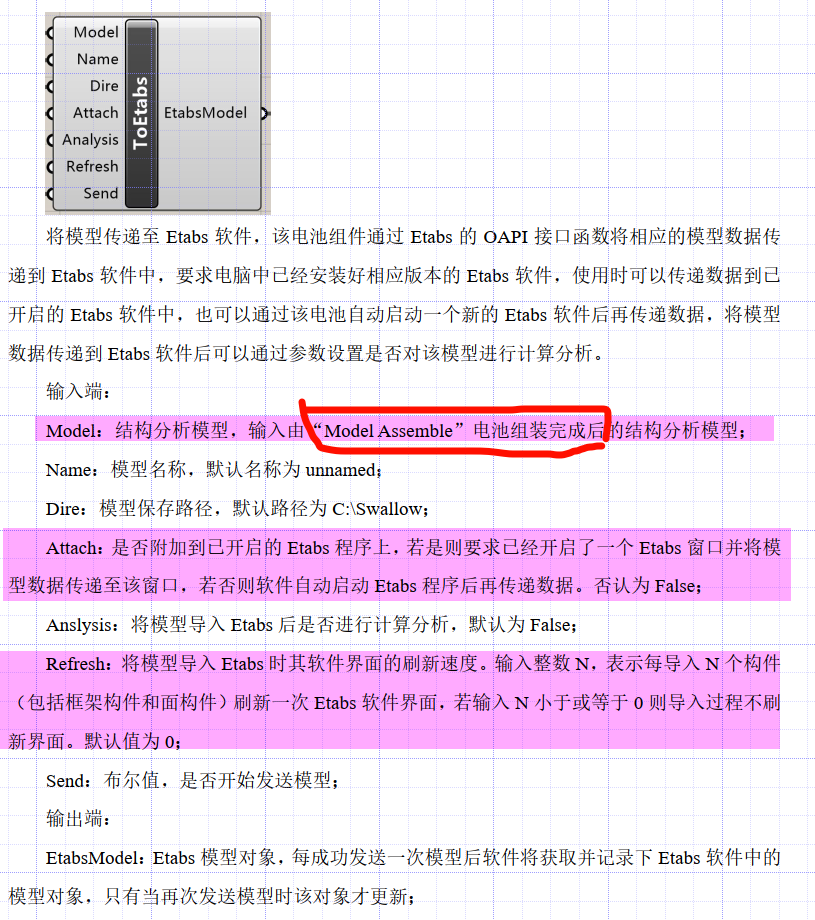
4.1 SendToEtabs
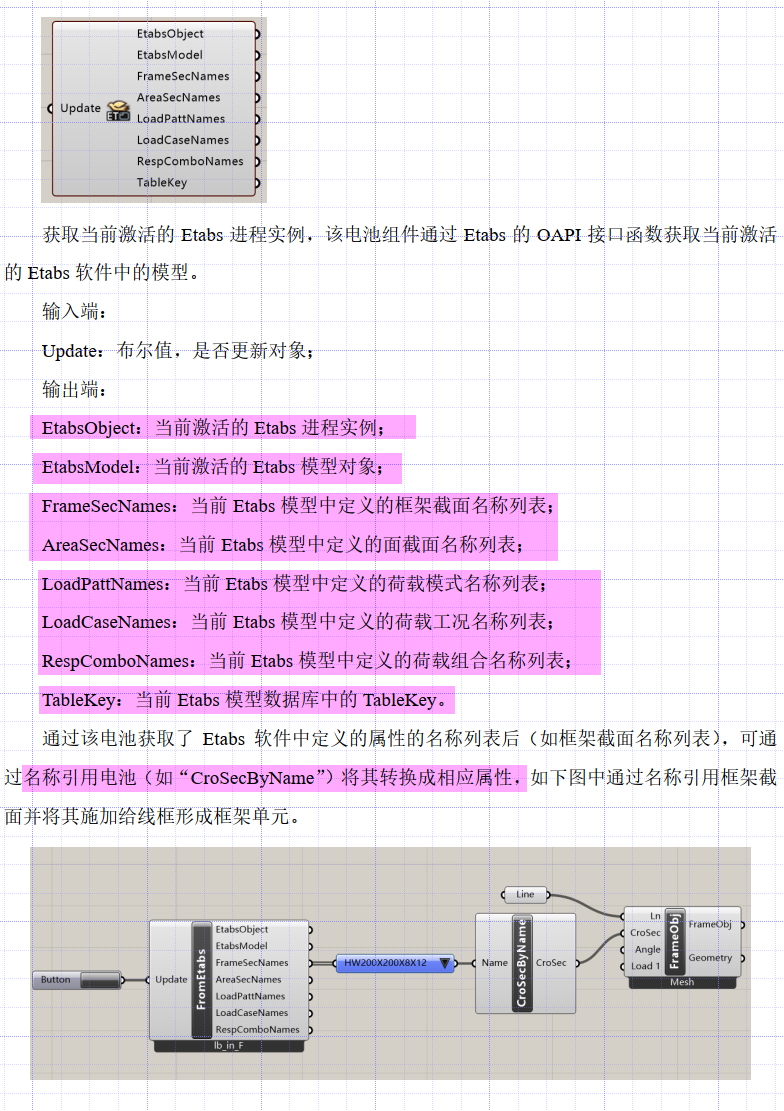
4.2 ImportEtabsModel
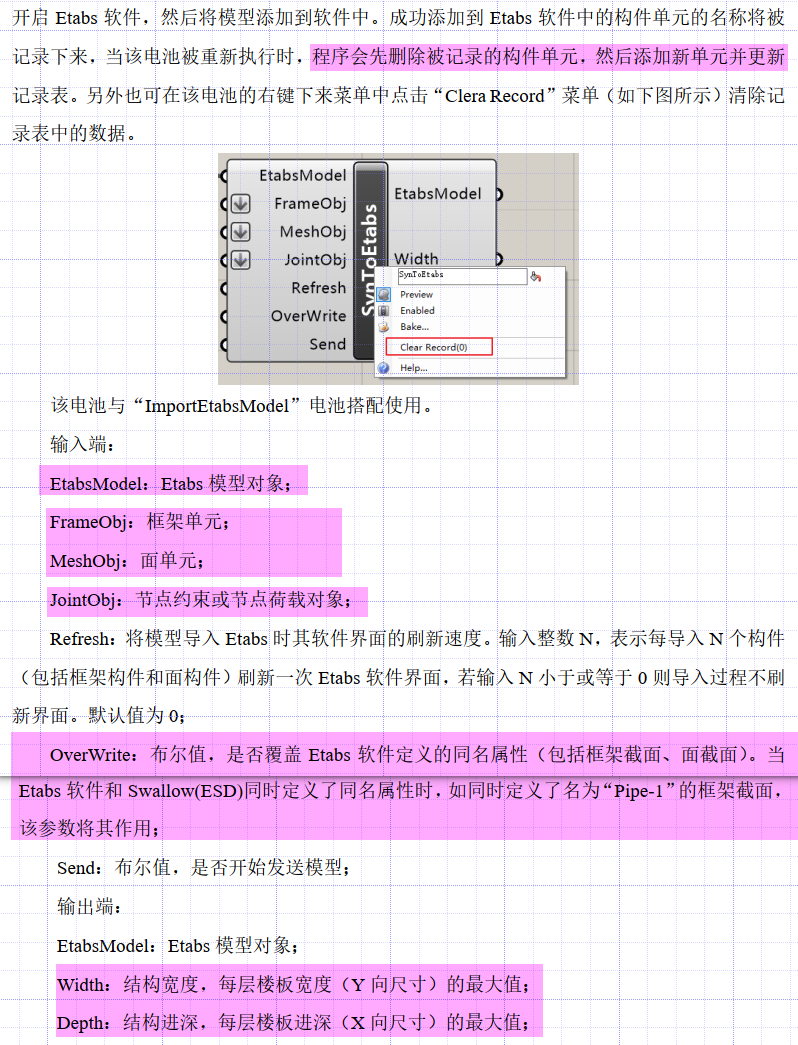
4.3 SynToEtabs
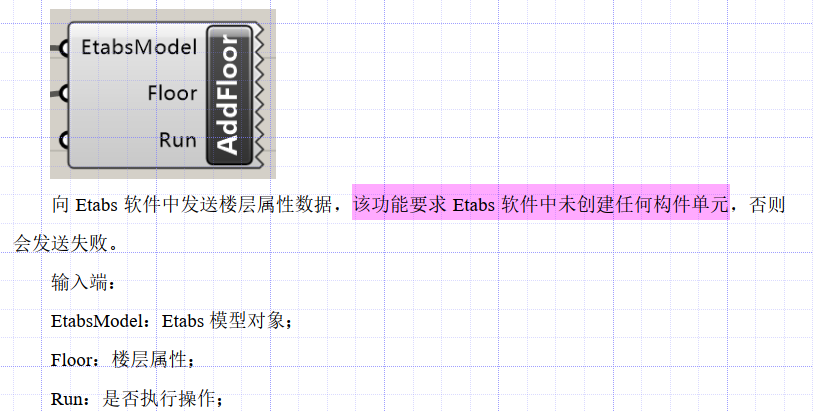
4.4 EtabsAddFloor发送楼层属性
4.5 EtabsDeconstructModel
4.6 EtabsGetObject
4.7 EtabsWallMeshGeneration
4.8 EtabsUpdateAutoWind
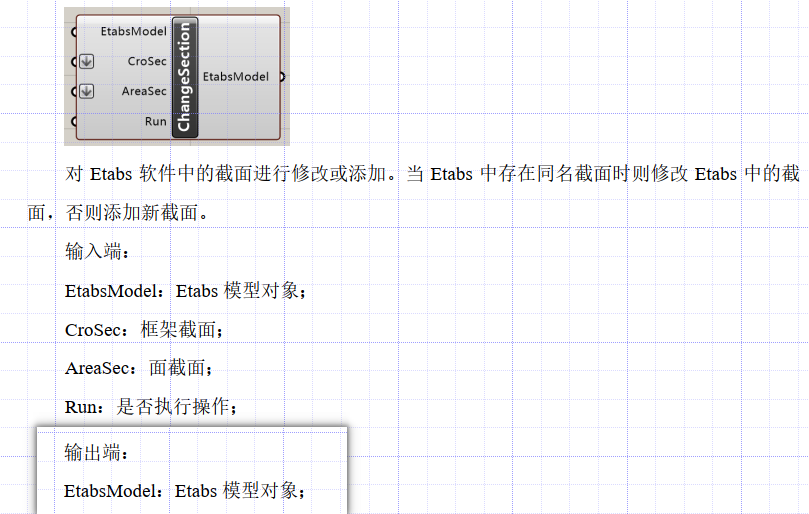
4.9 EtabsChangeSection
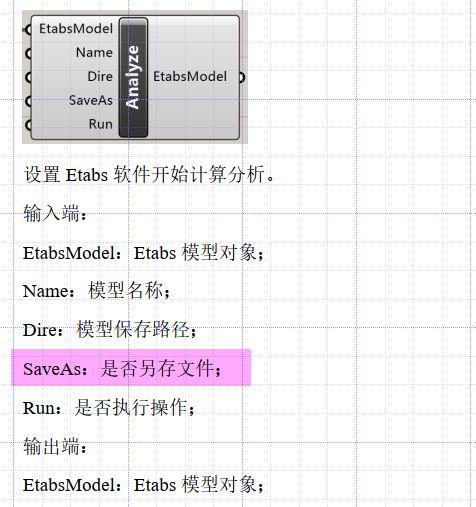
4.10 EtabsAnalyze
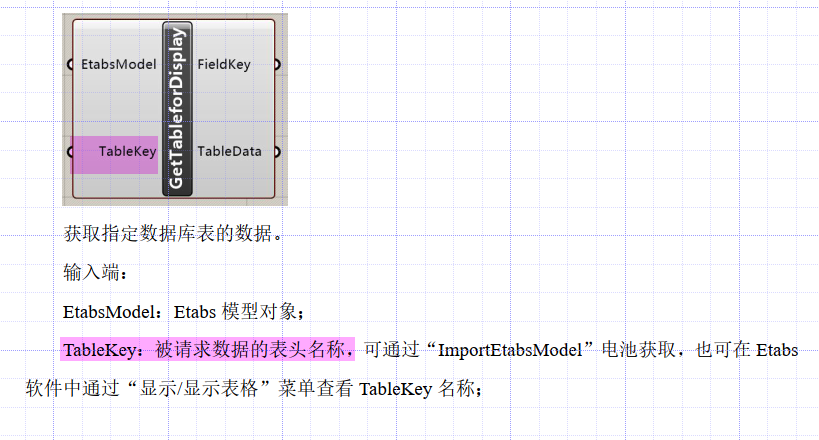
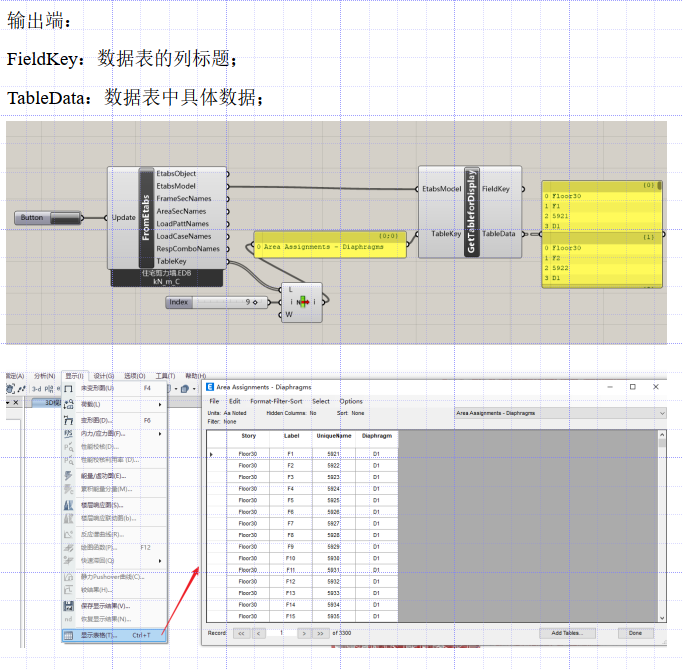
4.11 EtabsGetTableforDisplay
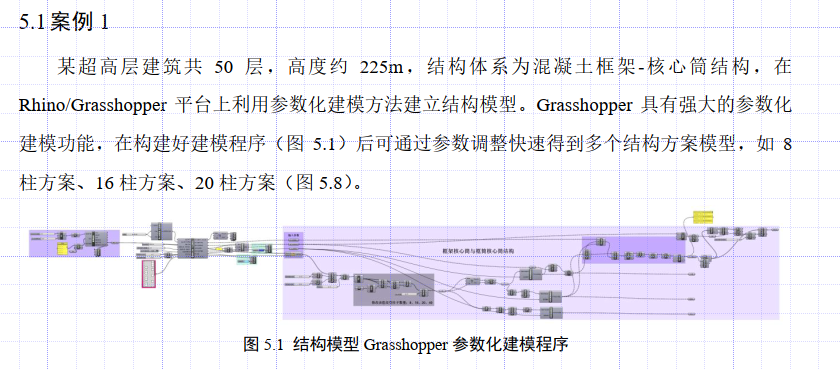
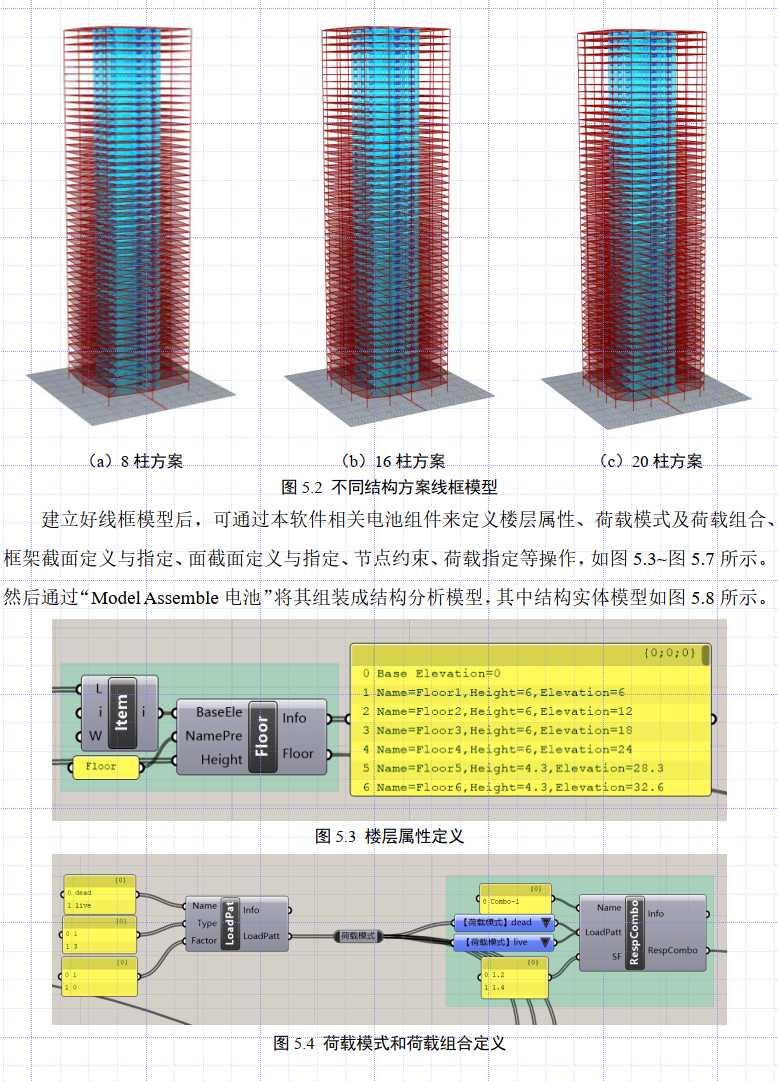
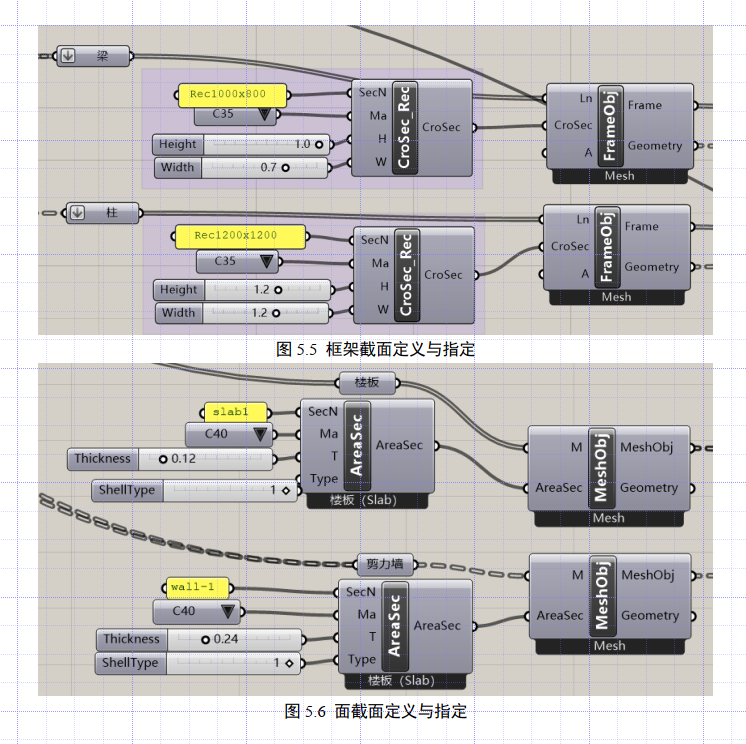
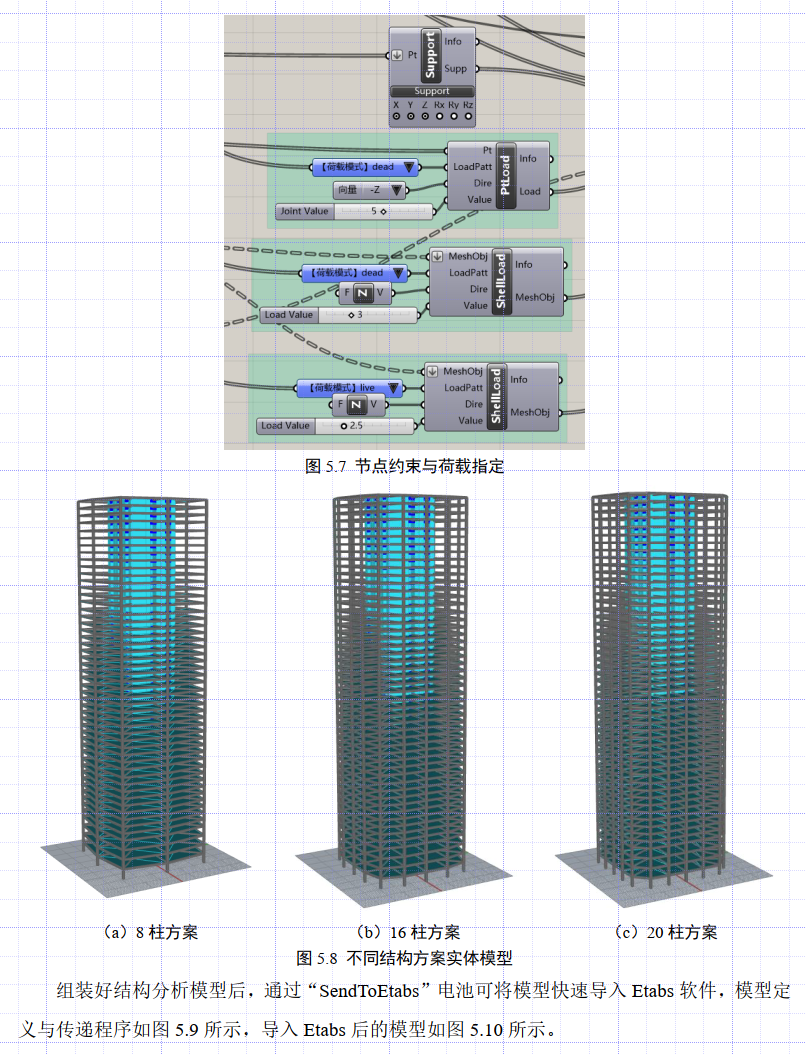
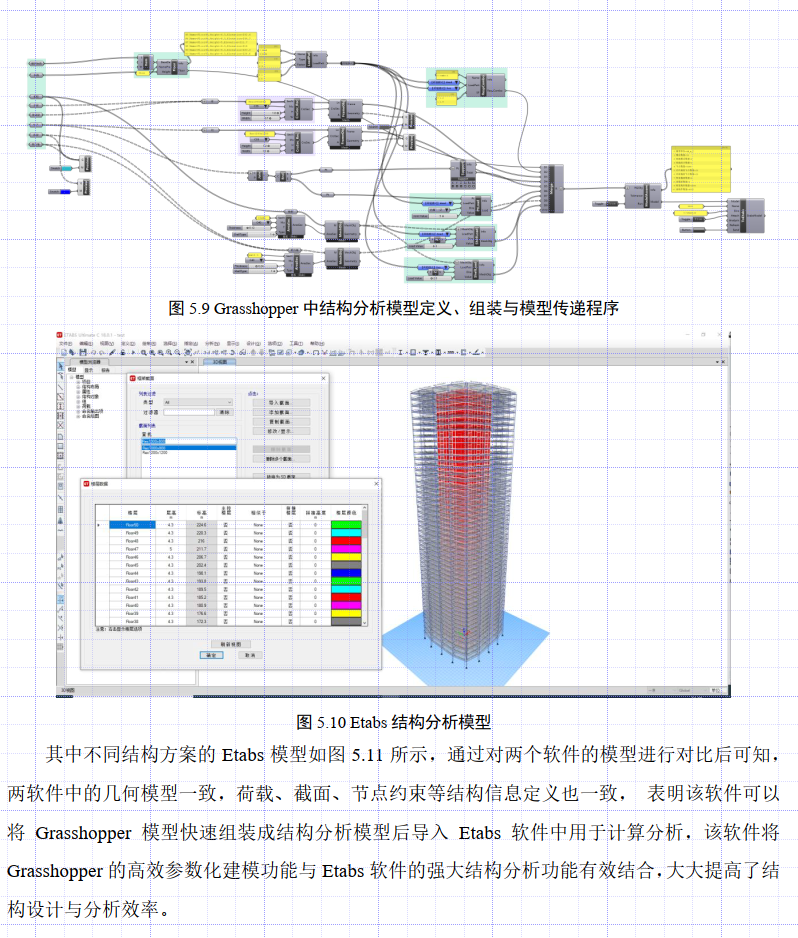
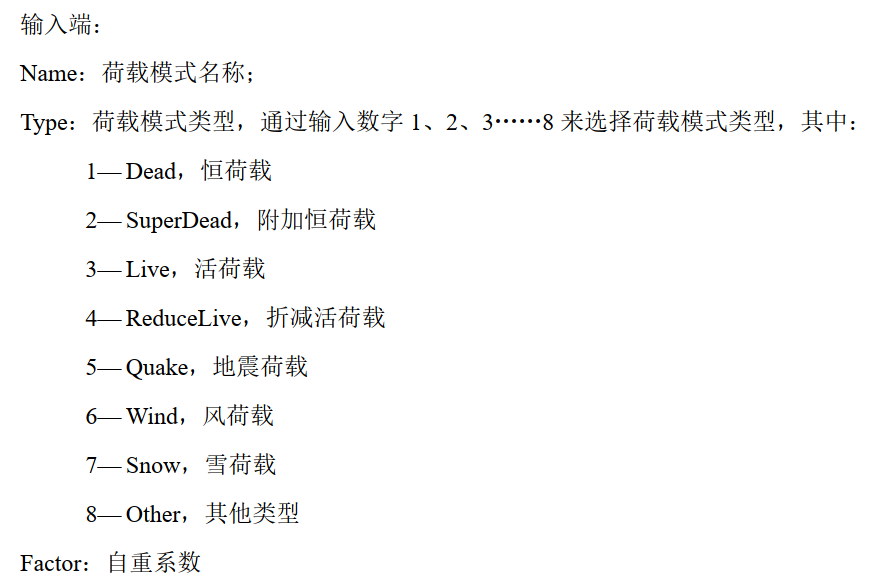
5. 案例