无人机路径规划多目标优化求解是一个复杂的过程,涉及到多个目标的考量和优化算法的应用。以下是一些关键点和相关算法的概述:
-
**多目标优化策略**:在无人机路径规划中,需要同时考虑多个目标,如路径长度、安全性、飞行时间和动力学约束等。优化这些目标可以帮助无人机在复杂环境中找到最优路径。
-
**启发式搜索算法**:传统的启发式搜索算法,如A*算法,已被用于无人机路径规划。然而,这些算法在复杂环境中可能面临效率和收敛速度的挑战。
-
**元启发式算法**:为了解决路径优化问题,研究者们采用了改进的启发式算法,如粒子群优化(PSO)、遗传算法(GA)和灰狼优化器(GWO),这些算法在求解复杂组合优化问题时表现出色。
-
**基于机器学习的方法**:深度学习和强化学习方法也被应用于无人机路径规划,使无人机能够从传感器数据中学习并适应复杂环境。
-
**多智能体协同规划**:在多无人机系统中,协同规划尤为重要。这涉及到任务分配、路径规划和协同决策,以确保无人机之间的合作和资源共享。
-
**高精度地图和传感器融合**:结合高精度地图数据和传感器数据,如GPS、激光雷达和摄像头,可以提高无人机导航的精确性,并适应动态环境。
-
**动态环境适应性**:无人机路径规划算法需要具备实时感知和适应环境变化的能力,以应对动态障碍物和气象条件的变化。
-
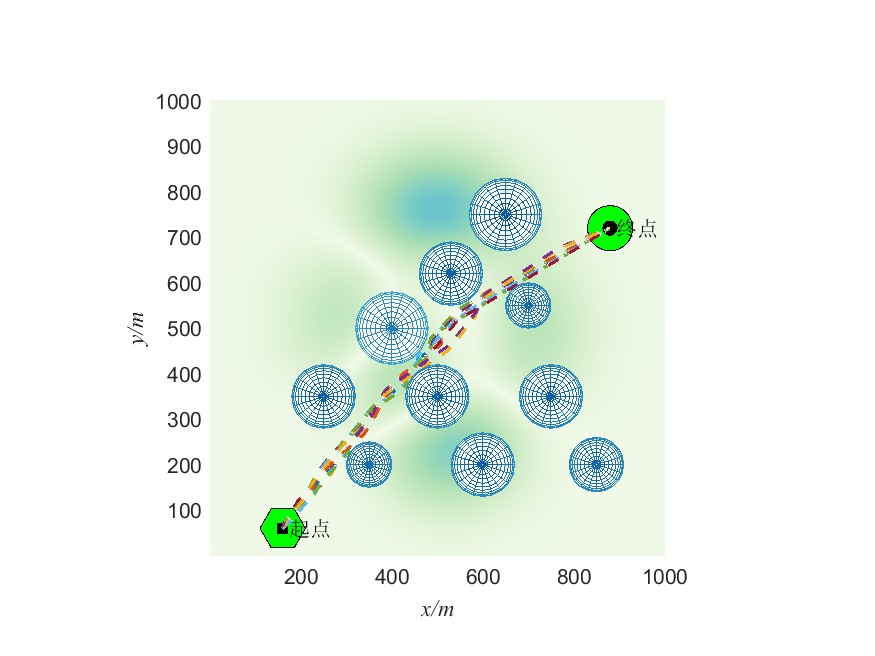
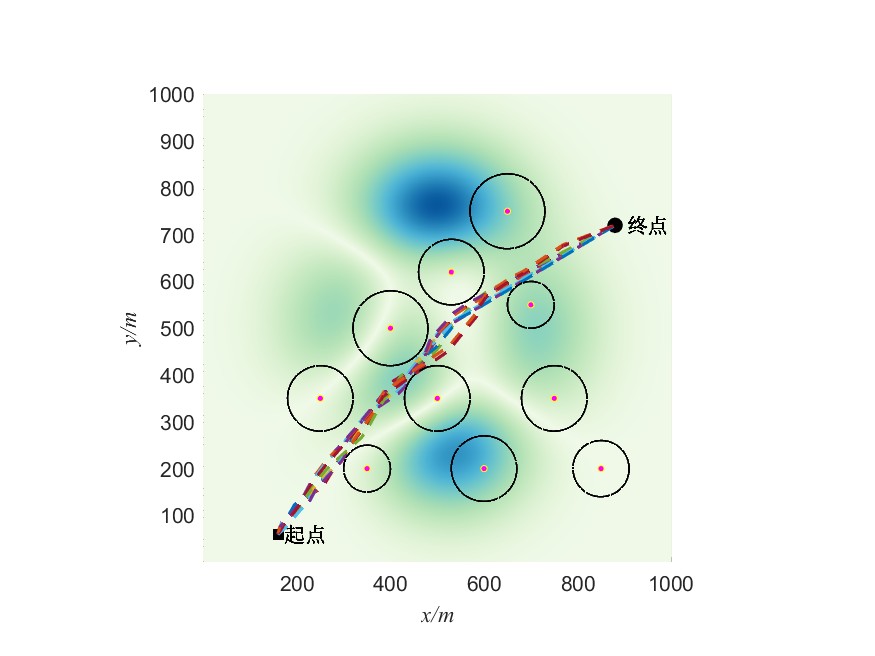
**基于导航变量的多目标粒子群优化算法(NMOPSO)**:这是一种针对复杂山地环境下无人机避障路径规划的算法,它使用导航变量描述无人机的飞行姿态,并通过多目标优化技术寻找安全、高效的路径。
-
**考虑安全飞行通道约束的多目标优化策略**:在复杂环境中,如煤矿井下,优化安全飞行通道和飞行轨迹对于确保无人机的飞行安全性至关重要。提出的算法通过对安全飞行通道生成过程中半平面法向量的调整,以及采用多目标函数对无人机轨迹的性能指标进行建模和优化,以生成具有较好综合性能的飞行轨迹。
通过这些方法和算法的综合应用,无人机路径规划多目标优化求解能够在确保安全的同时,提高路径规划的效率和效果。未来的研究将继续推动算法的发展,以适应更加复杂和动态的环境。
详细介绍
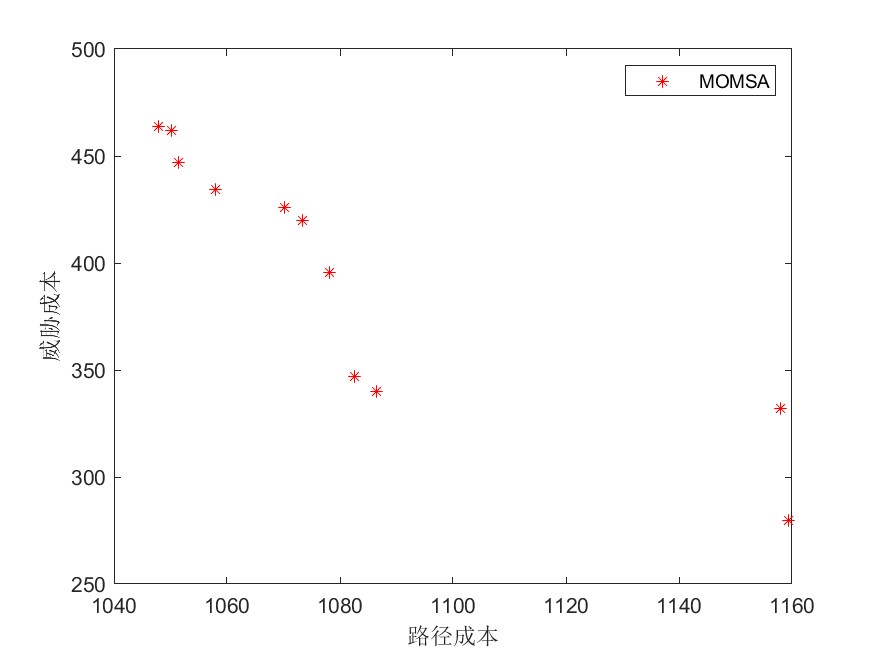
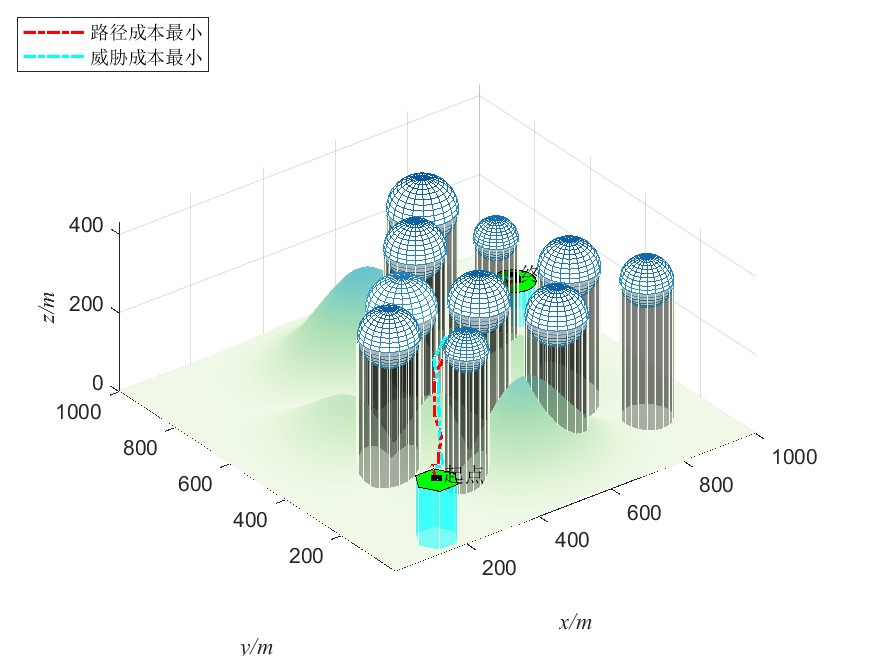
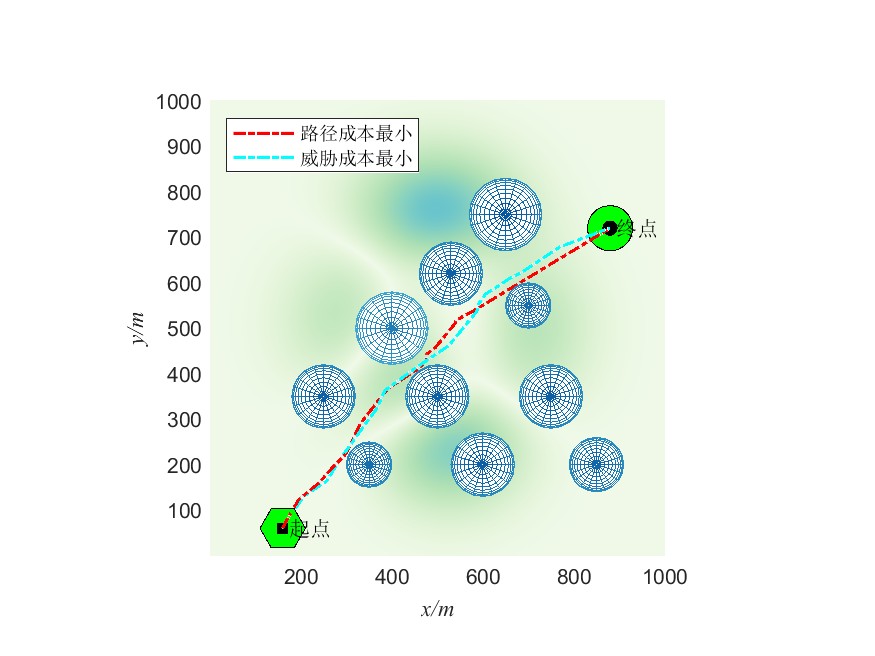
(一)多目标螳螂搜索算法(Multi-objective Mantis Search Algorithm ,MOMSA)求解无人机三维路径规划(MATLAB代码)-CSDN博客

完整MATLAB代码
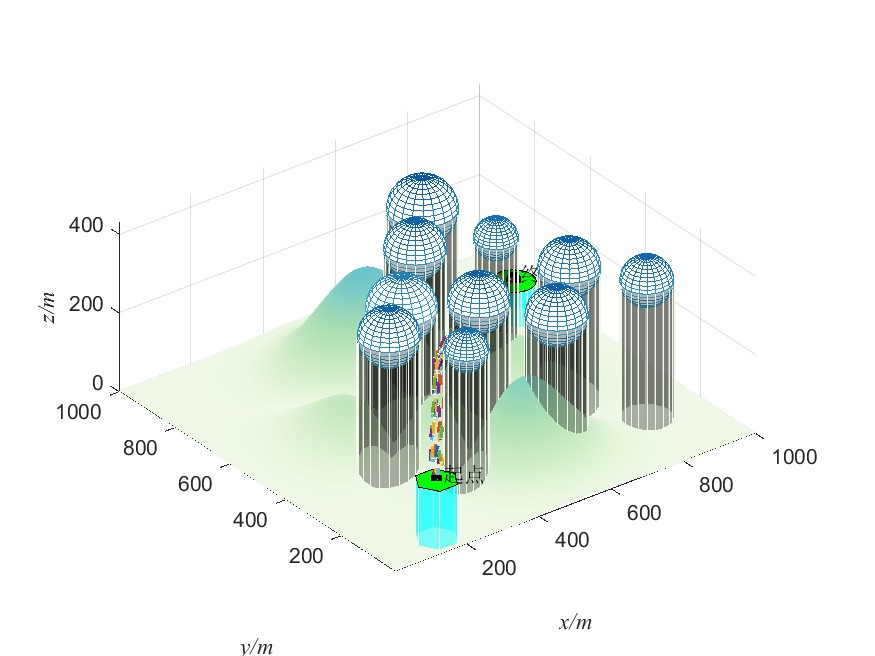
(二)多目标螳螂搜索算法MOMSA求解无人机三维路径规划,可以自行修改障碍物位置(MATLAB代码)