15Kg级无人机降落伞系统由以下几个主要部分组成:

-
降落伞主体:采用轻质高强度的材料制成,能够承受无人机在降落过程中产生的冲击力,并确保无人机平稳安全地着陆。
-
伞绳与连接机构:伞绳负责连接降落伞主体与无人机,要求具备良好的强度和韧性。连接机构确保伞绳与无人机之间的稳固连接,并能在紧急情况下迅速释放降落伞。
-
传感器与控制系统:包含速度传感器、高度传感器等,用于实时监测无人机的飞行状态。控制系统则根据传感器数据判断是否启动降落伞系统,并控制其释放时机。
-
电源与备用电源:为系统提供电力支持,确保在无人机主电源失效时,降落伞系统仍能正常工作。

技术实施
-
实时监测:无人机在飞行过程中,传感器实时监测其速度、高度等关键参数。
-
数据传输与处理:传感器数据通过无线传输方式发送到控制系统,控制系统对接收到的数据进行处理分析。
-
决策判断:当无人机遇到紧急情况(如失控、电池电量不足等),控制系统根据预设的安全阈值判断是否启动降落伞系统。
-
降落伞释放:若满足启动条件,控制系统触发连接机构释放降落伞。降落伞在空气阻力的作用下迅速展开,减缓无人机的下降速度。
-
最大开伞重量:15kg
-
最大开伞速度:80 km/h
-
产品重量(不含安装配件):≯800g
-
最大开伞过载:≯6g
-
最大下降速度(海平面高度):≯5m/s
-
最低开伞高度:50m
-
防护等级:Ip45
-
主伞面积:6.5 ㎡
-
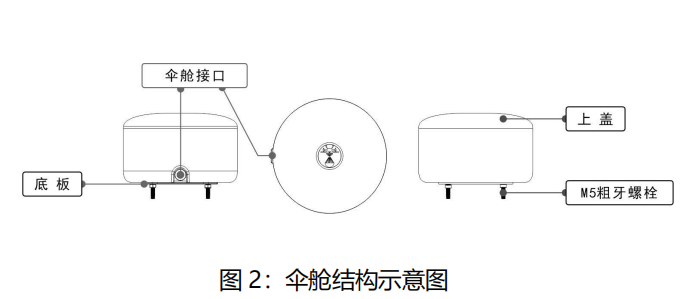
伞舱尺寸:≯180mm*45mm
-
工作温度:-20℃-50℃
-
自主续航时间:30min
-
开伞方式:飞控开伞 自主开伞
-
通信方式:Uart
安全性能
-
高可靠性:降落伞系统经过严格的质量控制和测试验证,确保在紧急情况下能够可靠工作。
-
稳定性好:降落伞主体采用流线型设计,减少空气阻力,提高稳定性。同时,伞绳和连接机构也经过精心设计,确保在降落过程中不会断裂或脱落。
-
适应性广:该系统适用于不同型号和重量的无人机,具有良好的通用性和适应性。
应用场景
-
消防救援:无人机搭载灭火设备或救援物资,在紧急情况下快速到达火灾现场或灾区,通过降落伞系统实现安全着陆,为救援工作提供有力支持。
-
货物运输:无人机在货物运输过程中,若遇到恶劣天气或设备故障等紧急情况,降落伞系统能够确保货物安全着陆,减少损失。
-
航拍测绘:无人机在航拍或测绘过程中,如遇到电池电量不足或失控等意外情况,降落伞系统可确保无人机安全着陆,保护设备免受损坏。
局限性
-
降落伞系统虽然提高了无人机的安全性,但也会增加无人机的整体重量和复杂度,可能对无人机的性能产生一定影响。
-
在某些特殊环境下(如强风、雷电等),降落伞系统的工作性能可能受到影响,导致无人机无法安全着陆。
-
降落伞系统的启动和释放需要一定的时间和空间,若无人机在狭窄或障碍物较多的区域飞行时,可能会受到限制。