1.BackGround:为什么要进行进程调度?
在多进程环境下,内存中存在着多个进程,其数目往往多于处理机核心数目。这就要求系统可以按照某种算法,动态的将处理机CPU资源分配给处于就绪状态的进程。调度算法的实质其实是一种资源分配策略。进程调度一般可以分为抢占式与非抢占式。
Note:进程的状态可以分为创建状态->就绪状态->运行状态->等待状态(IO或其他阻塞事务) 其实还有一个挂起状态,IO时切换至内核态等待完成事件,此时可以直接挂起进程,事件完成唤醒进程,执行其他用户指令。
创建状态 -> 就绪状态 -> 运行状态 -> 等待状态 -> 就绪状态 -> 运行状态 -> 挂起状态
^ | | |
| v v v
终止状态 挂起状态-> 就绪挂起状态 <-> 等待挂起状态
2.调度算法的目标
如何选择调度算法类型与其设计目标有关,例如批处理系统、实时系统,需要具体问题具体分析。
总体目标有以下方面:
(1)资源利用率:与CPU繁忙程度有关
(2)公平性:尽量避免进程饥饿现象。主要考虑长作业进程跟短作业进程如何平衡资源分配。
(3)平衡性:多种类型进程例如计算密集型进程、IO密集型进程需要保持资源使用的平衡性。
(4)安全性:安全策略只要需要就必须强制优先执行。
3.调度算法
(1)FCFS(First Come First-served)先来先服务调度算法
顾名思义,选择就绪队列中最先进入的分配CPU资源执行;类似先来后到;
缺点:短作业有可能不可以及时响应,如果其前方有一个长作业的话。
(2)SFJ(short job first)短作业优先调度算法
SFJ使用作业进程的服务事件计算优先级,服务时间越短,优先级越高。
缺点:长作业饥饿,有可能被无限期延后。
有时无法准确预估作业所需时间,如果判断失误会出现问题。
人机无法实时交互。
(3)HRRN(Highest Response Ratio Next)高相应比优先调度算法
其本质是先来先服务与短作业优先的这种,(1)(2)无法兼顾短作业与长作业;
定义一个相应比(优先权)= 1 + 等待时间/要求服务时间
当等待时间相同时,服务时间越短优先级越高,体现短作业优先;
当服务时间相同时,等待时间越长优先级越高,可以兼顾长作业;
缺点:使用该算法,有计算相应比的开销;
(4)时间片轮转调度算法
Round-Robin系统根据FCFS策略将所有就绪进程排列成一个就绪队列,设置一个时间片,时间到了产生一个中断,激活调度程序将CPU分给队首进程。难点在于确定时间片长度。
(5)多级反馈队列调度算法(multieved feedback queue)
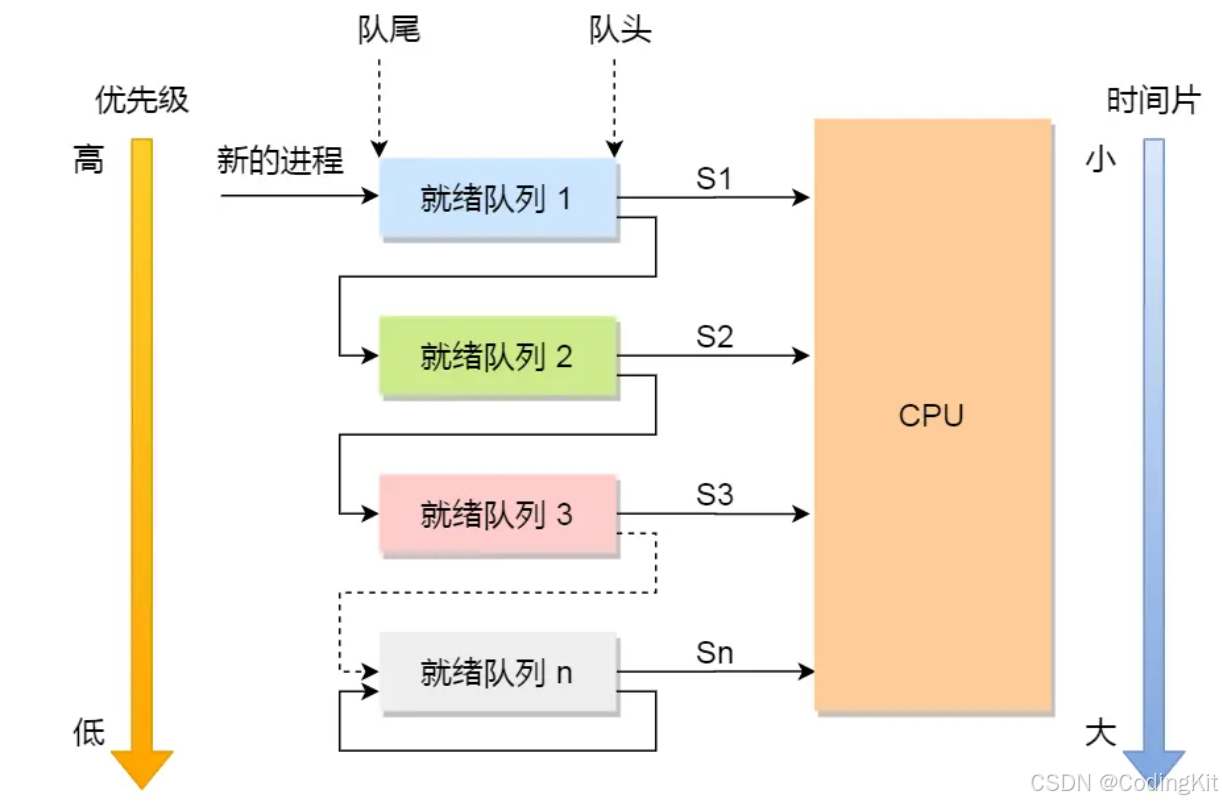
设置多个就绪队列,每个队列赋予不同优先级,优先级高的时间片短,优先级低的时间片长;默认先执行优先级高队列中的Task采用FCFS算法,执行完毕再执行下一优先级;如果时间片耗尽未执行完则优先级降级,将其加入下一等级队列尾部。