
💗 有遇到安装问题可以留言呀 ~ 当时踩了挺多坑,能帮忙解决的我会尽力 !
1. 安装操作系统环境 Linux ❄️ VM / VirtualBox + Ubuntu20.04
-
👉 保姆级图文安装教程指路,有经验的话 可以用如下资源自行安装
ITEM REFERENCE VMware Workstation Pro v16 https://www.ruanhuicn.com/soft/vmware-workstation-pro.html VirtualBox ROS 机器人入门 P7~P13 Ubuntu20.04 iso http://mirrors.aliyun.com/ubuntu-releases/20.04/
2. 安装对应版本的 ROS ❄️ Noetic
-
在终端依次执行即可:
shellsudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list' sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654 sudo apt update sudo apt install ros-noetic-desktop-full # 如果网卡则重复执行下 update 和 install 这两步 # 如果需要卸载: sudo apt remove ros-noetic-* echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc source ~/.bashrc sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential sudo rosdep init ## 如果 rosdep update 总失败,可尝试先换源、操作如下: ## export ROSDISTRO_INDEX_URL=https://mirrors.tuna.tsinghua.edu.cn/rosdistro/index-v4.yaml rosdep update
3.安装使用小工具 ❄️ terminator、VSC
-
安装终端
terminator:sudo apt install terminator- 打开一个终端窗口:Ctrl + Alt + T
- 水平分割终端:Ctrl + Shift + O
- 水平分割终端:Ctrl + Shift + E
-
安装 VSC:记得安装后,安装相关插件 C++, Python, ROS, CMake Tools
-
👉 保姆级图文安装教程指路 ,安装完成后,可按如下方式启动
shellcd 目标文件夹 code . # 用 VSC 中打开目标文件夹
-
🚩 至此 安装完成啦 ❗❗❗ 可以按下面的说明,简单测试下呀 ~
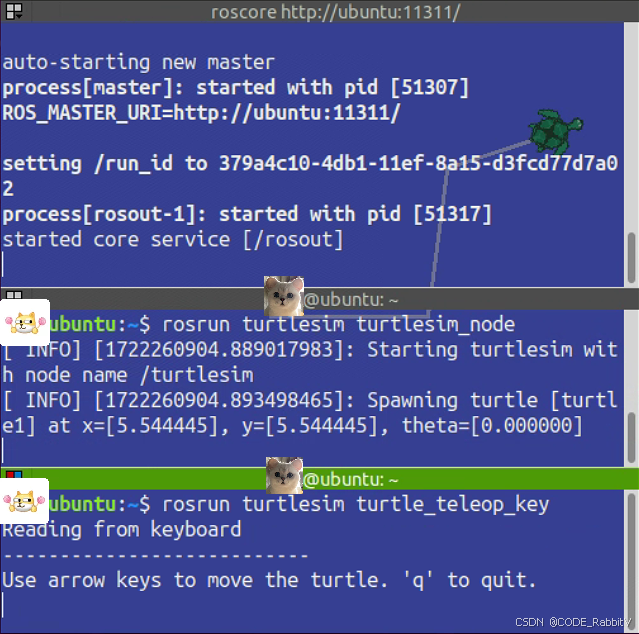
首先启动三个命令行窗口 Ctrl + Alt + T
- 命令行窗口 1 键入💜
roscore - 命令行窗口 2 键入💜
rosrun turtlesim turtlesim_node- 此时会弹出图形化界面
- 命令行窗口 3 键入💜
rosrun turtlesim turtle_teleop_key- 在其中,上下左右控制
命令行窗口 2中乌龟的运动
- 在其中,上下左右控制
另外,使用ROS需要 C++ 或者Python的编程经验,我的博客主页也有相关的教程发布,需要的友友自取!
参考资料 : ROS理论与实践在线文档, B站视频教程