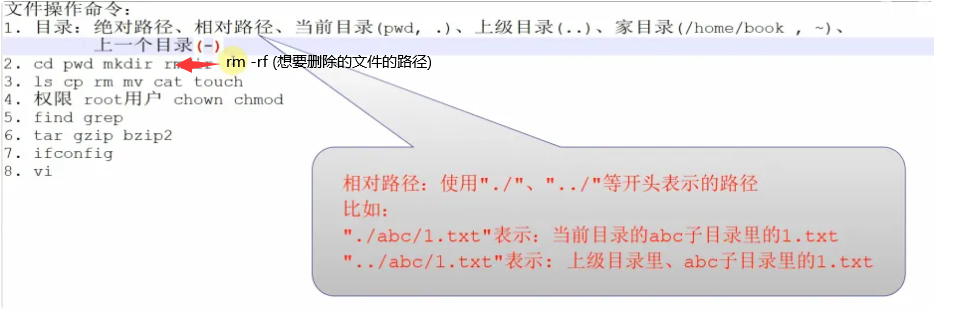
1.文件操作命令
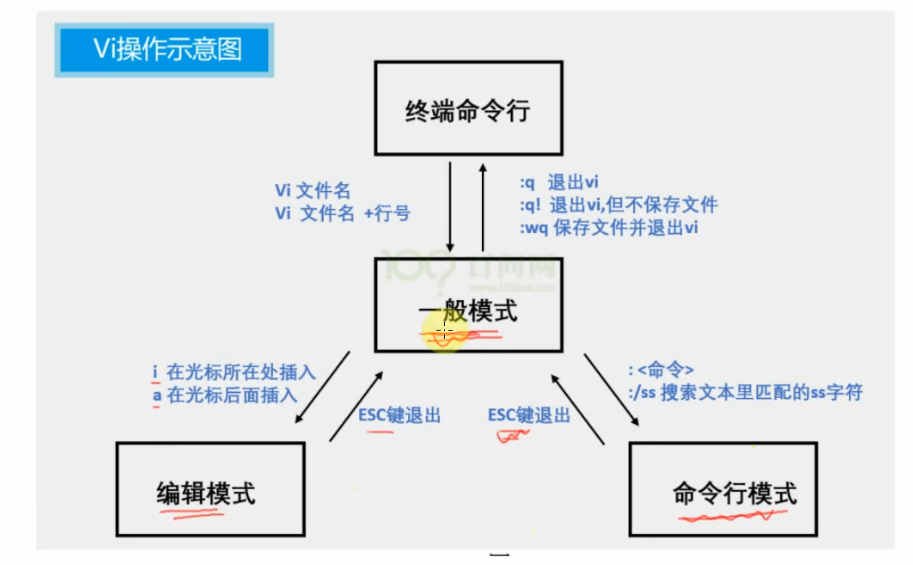
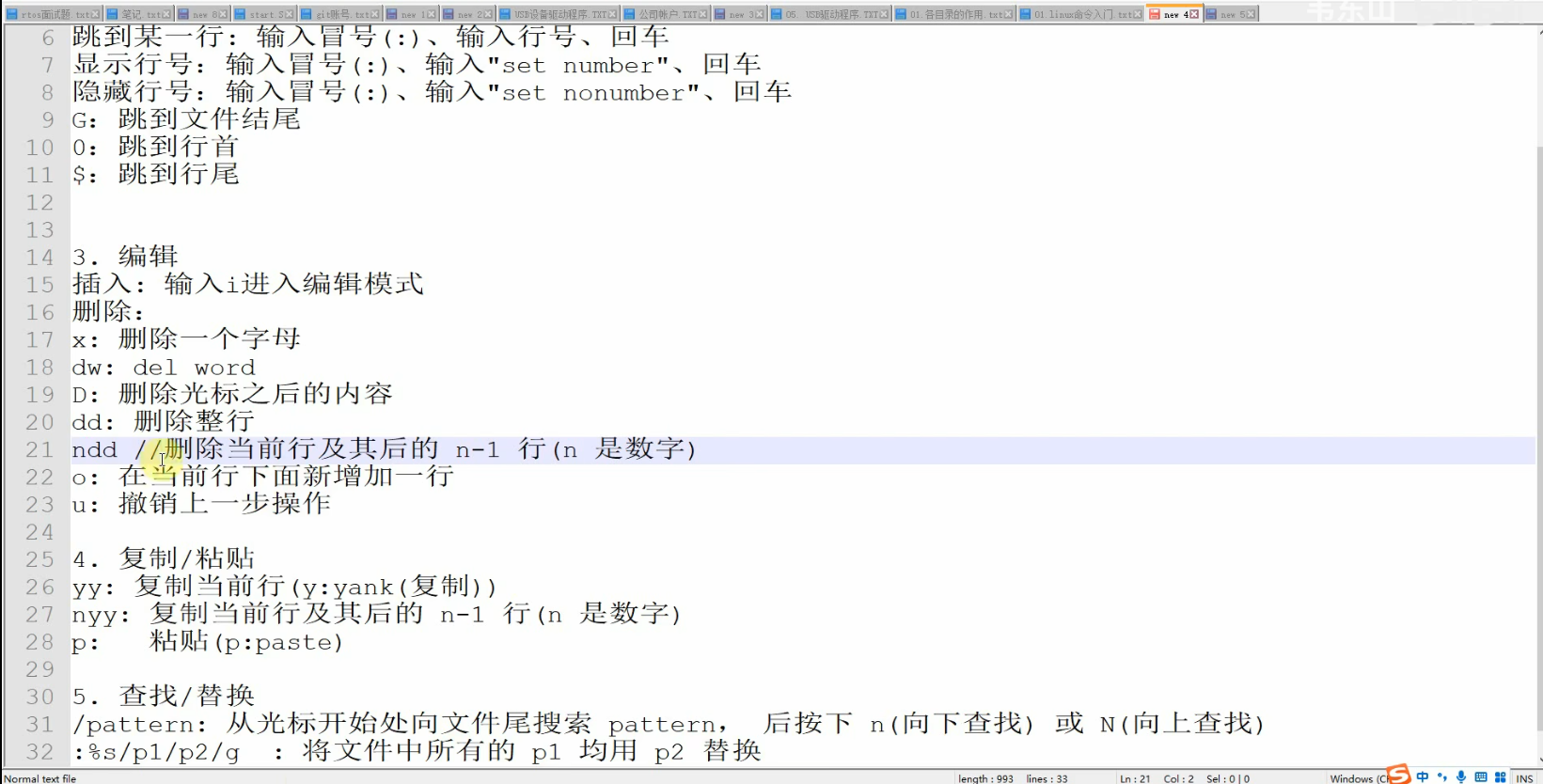
2.VI编辑器的部分命令
3.Uboot命令设置环境变量
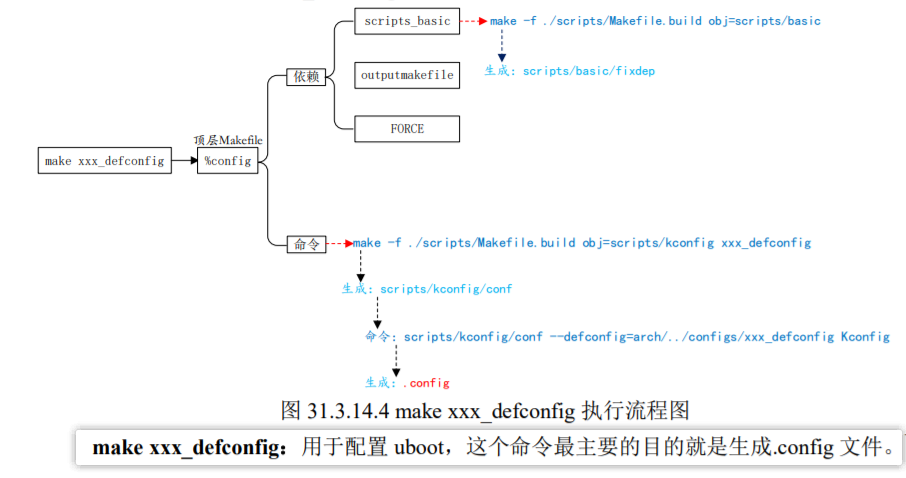
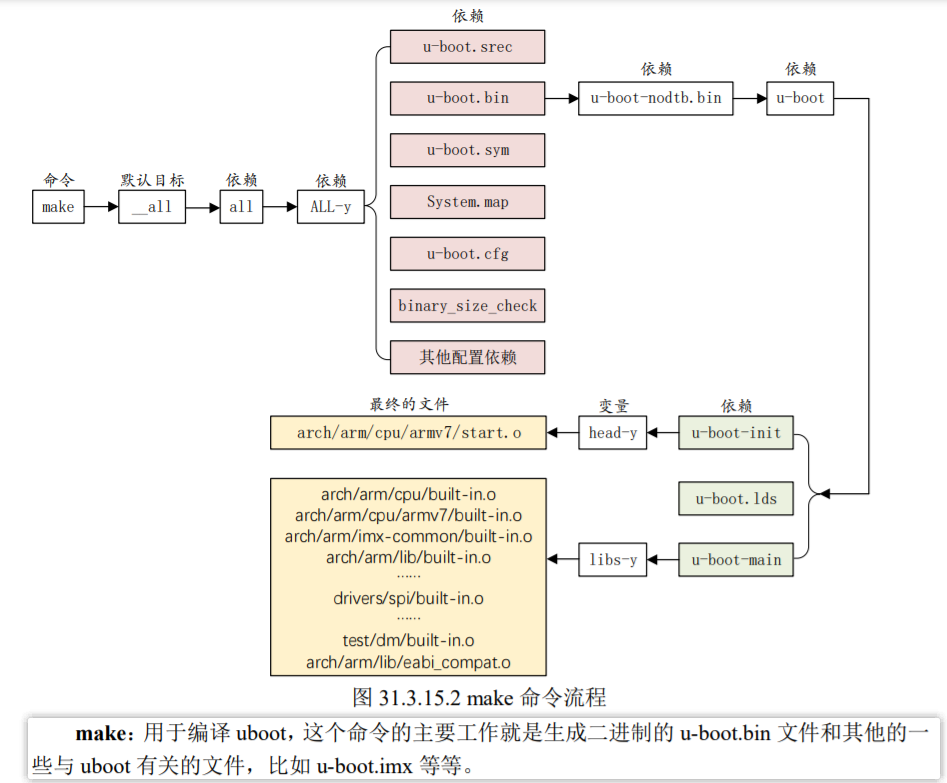
- uboot 的顶层 Makefile的重点是"make xxx_defconfig"和"make"这两个命令 ,分别如下:
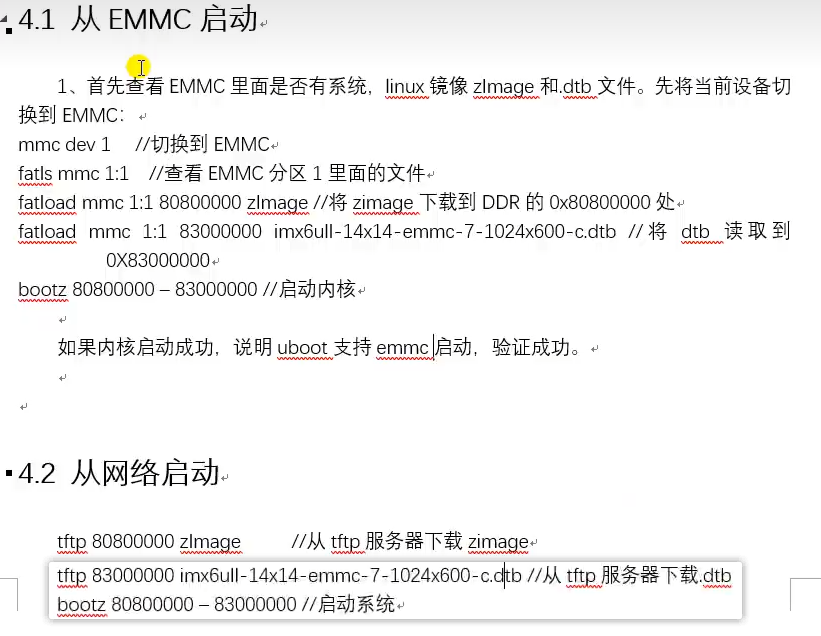
5.在串口SecureCRT中利用uboot启动Linux内核的两种方式
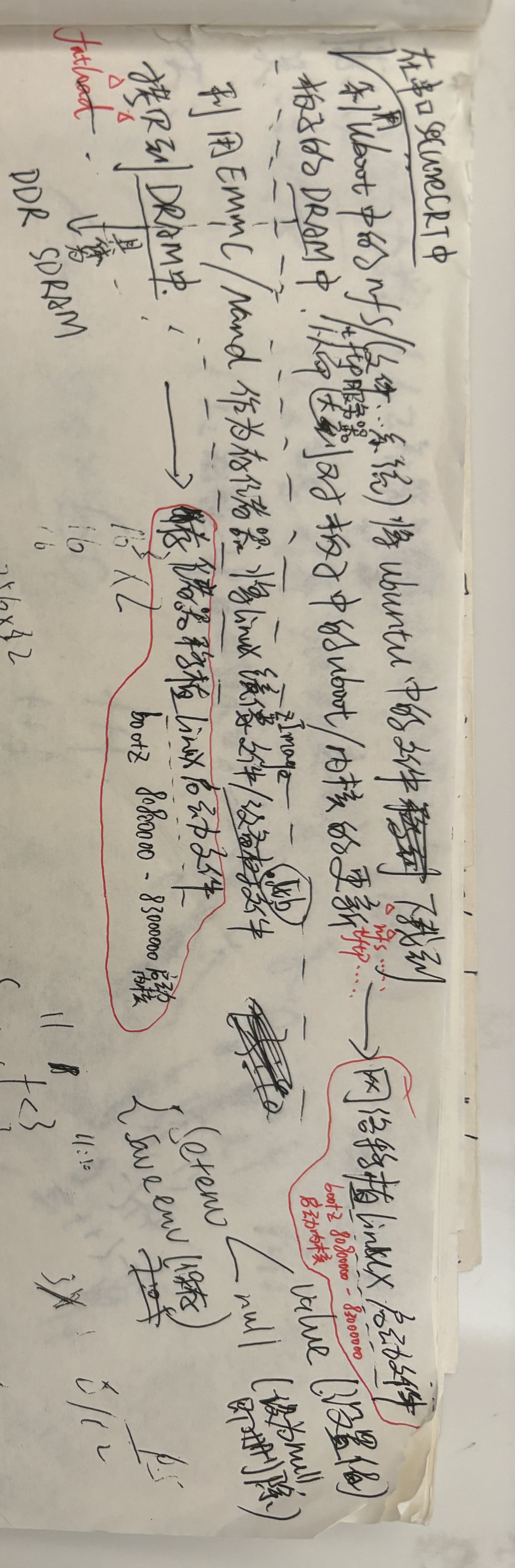
6.Linux内核移植到开发板上也可以反过来想:即为向Linux内核文件中添加自己型号对应的开发板(自己型号的芯片)---(具体即为添加zImage:Linux镜像文件和.dtb:设备树文件)
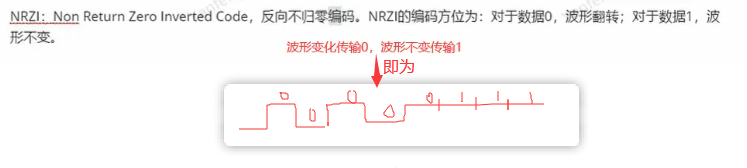
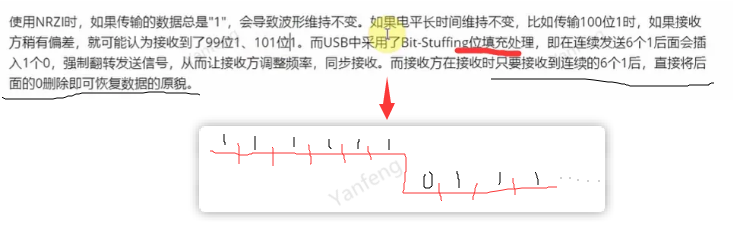
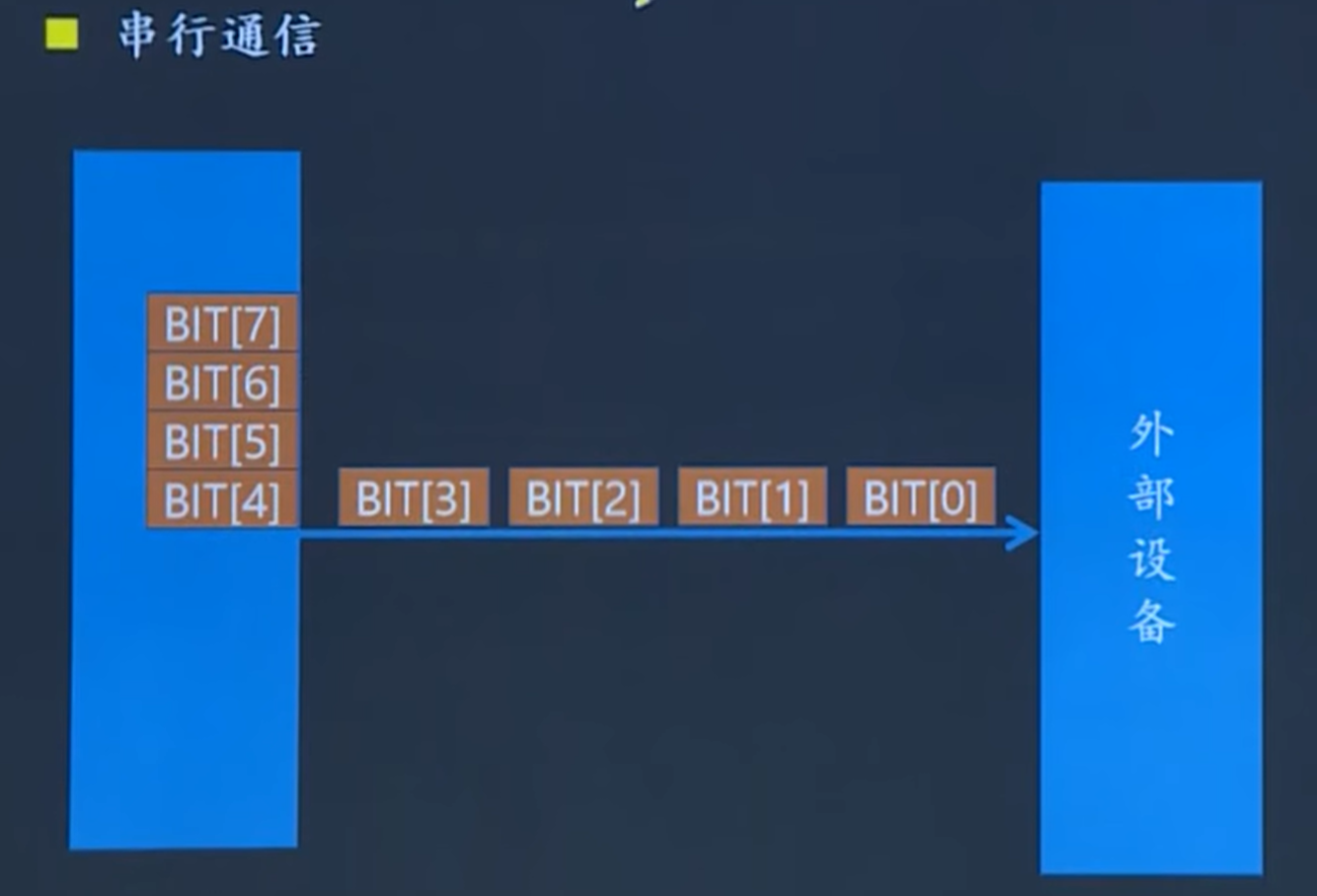
7.反向不归零编码NRZI与位填充:
8.串口基本概念
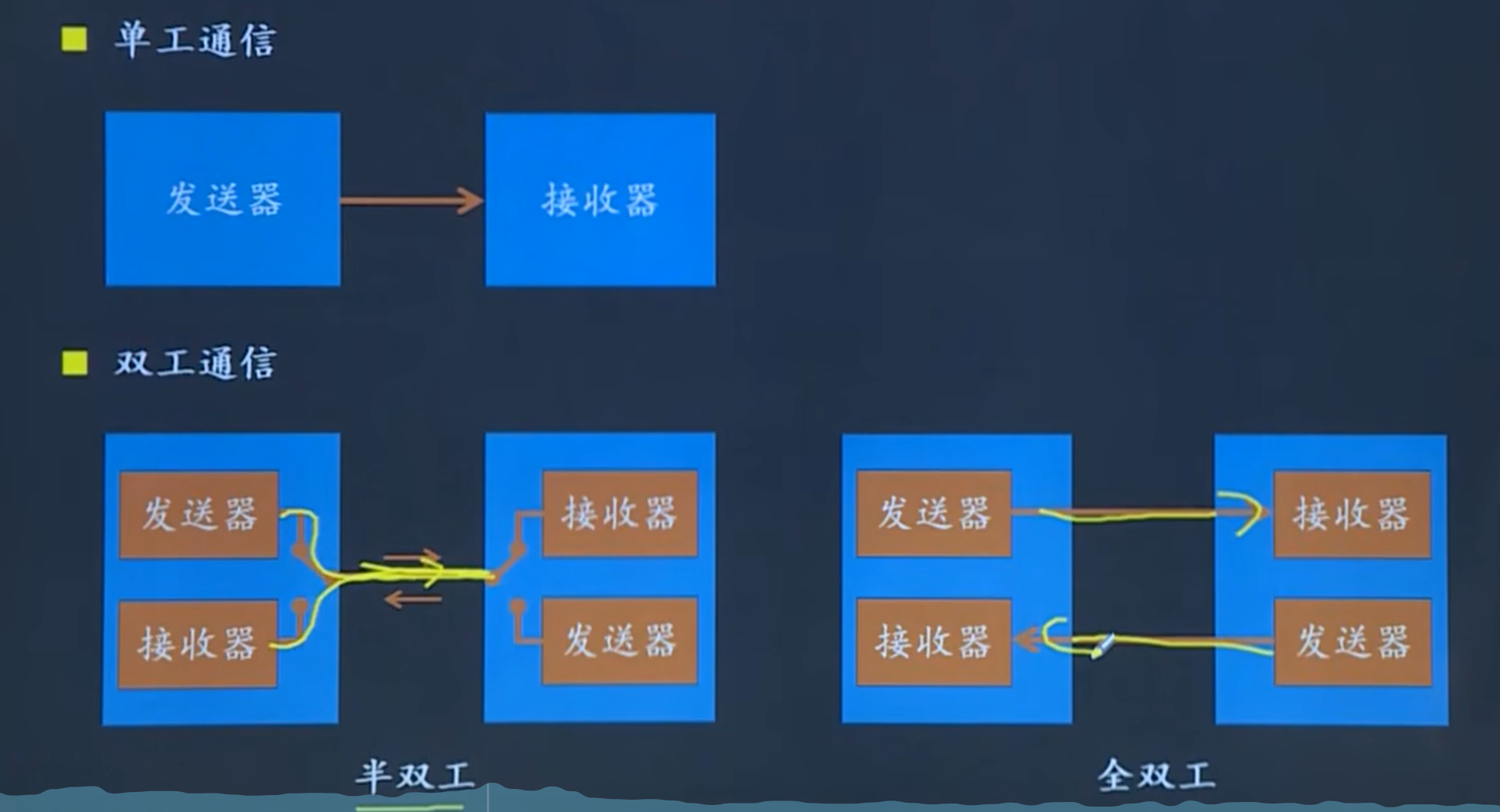
全双工
低位先行
TXD发、RXD接
起始位 | 数据位 | 校验位 | 停止位
0 8-9位 奇/偶校验 1
通讯前的约定(协议)用串口时双方要协定好没传输一个数据需要多少秒(约定好波特率)
奇偶校验位
数据位+校验位个数位奇数个,则正确
波特率bps,每一秒传输数据的位数
传输:
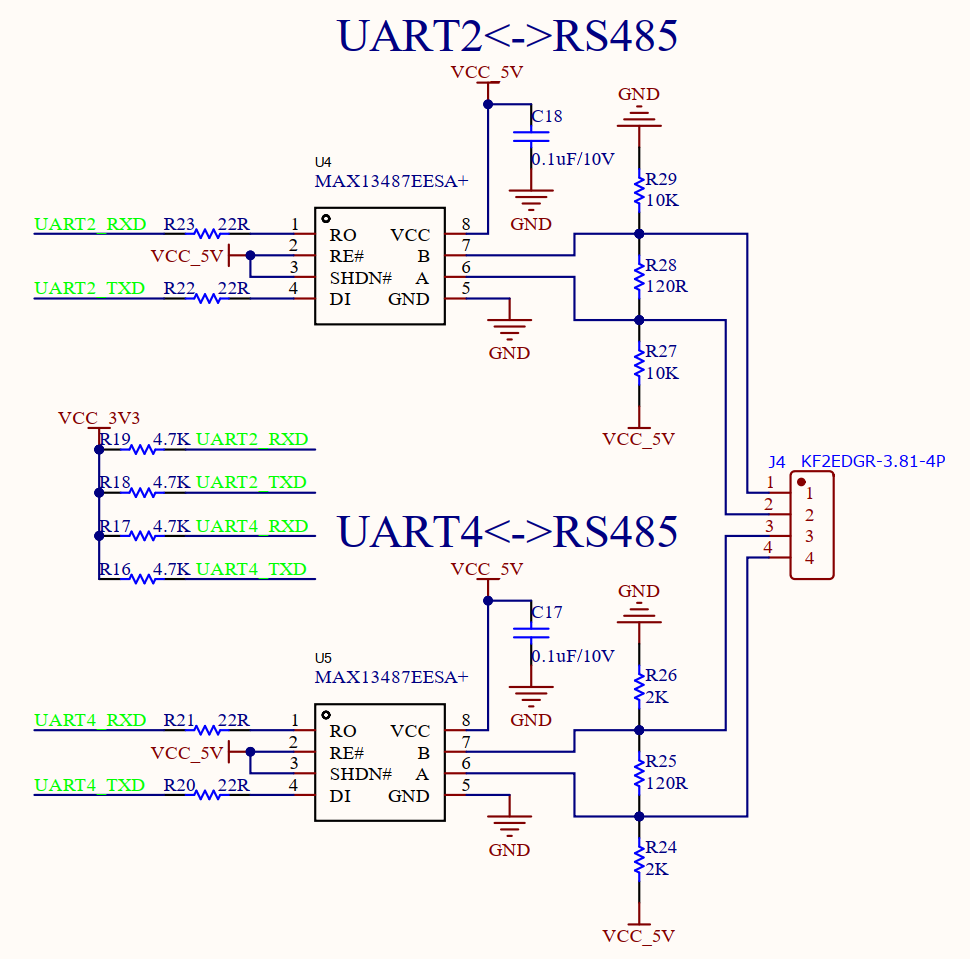
可以直接连接一个模块
也可以连接一个电平转换芯片把TTL电平转换为RS485或者RS232
9.串口的三种编程方式
注意:中断方式和DMA方式
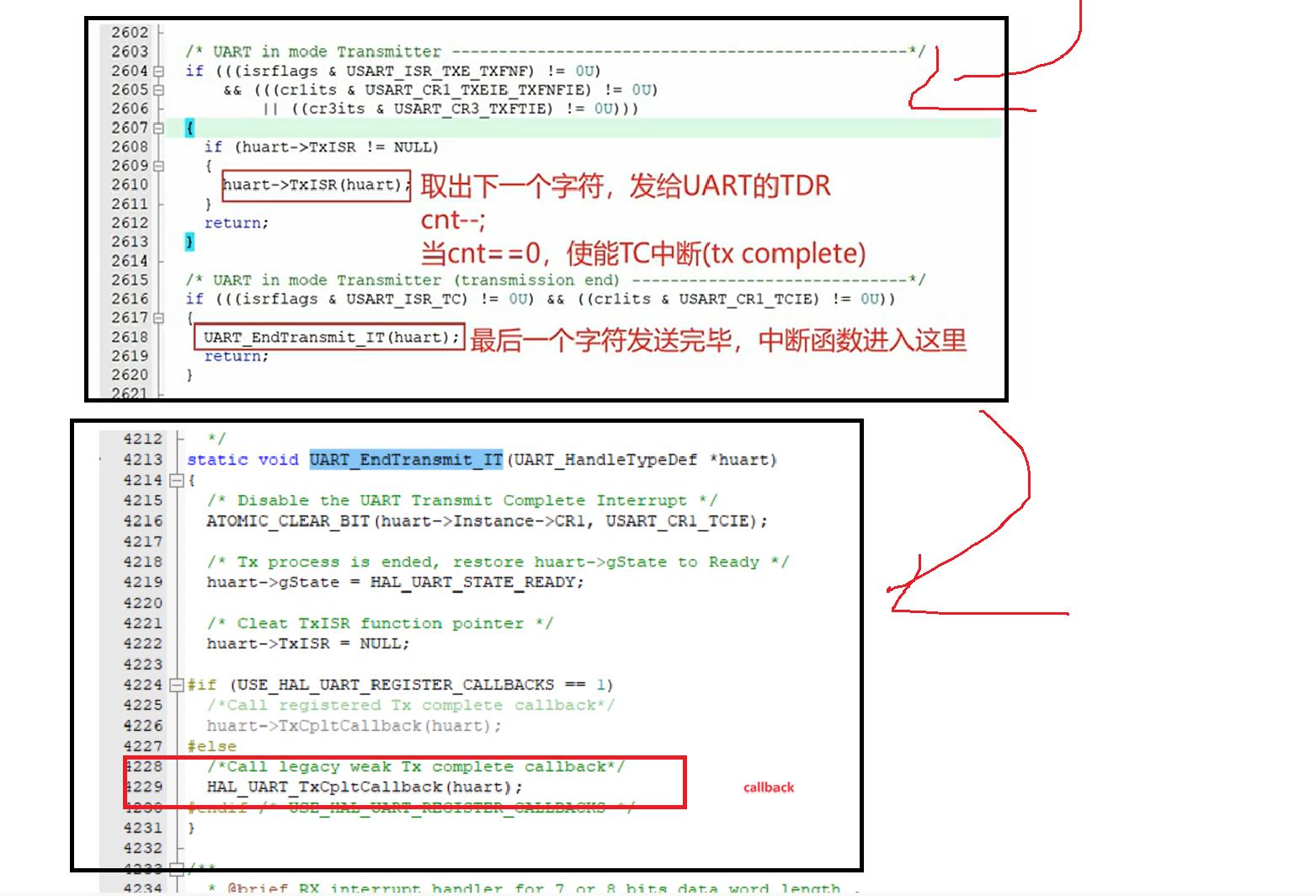
第一个Transmit都是使能中断,然后在中断中完成传输,在中断的最后有一个回调函数callback,callback为_weak函数,用户可以自己去写具体要求
1、查询方式
收/发数据时需要不停查看相应寄存器是否为空
2、中断方式
Transmit_IT使能中断
callback会给反馈,但也是会经常打断cpu
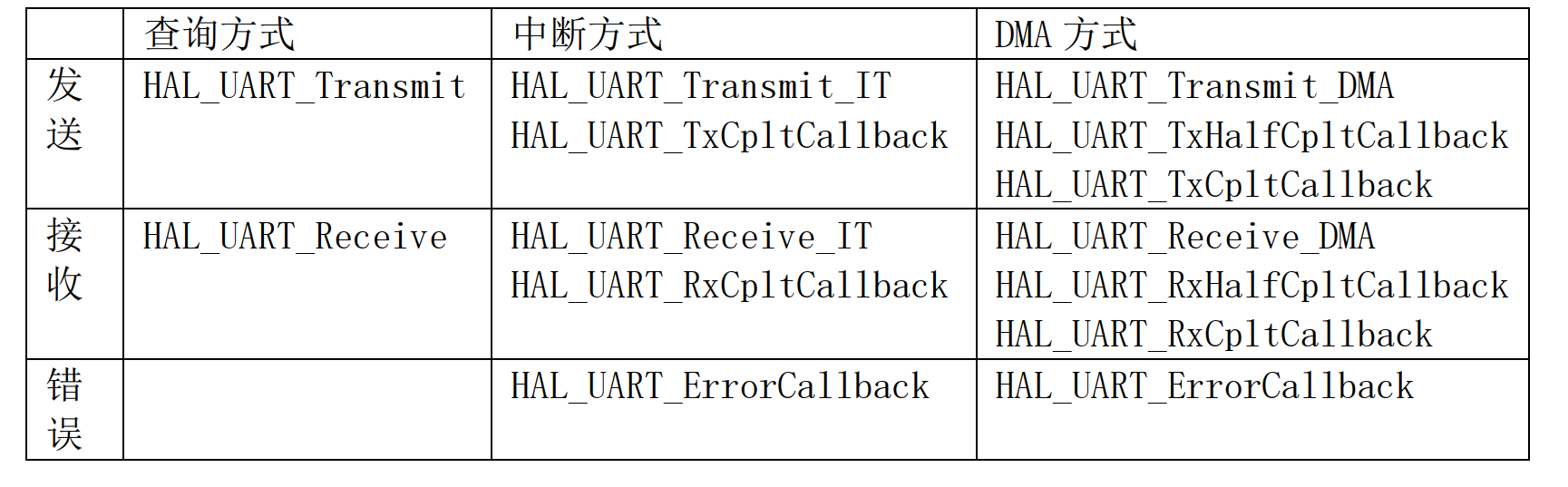
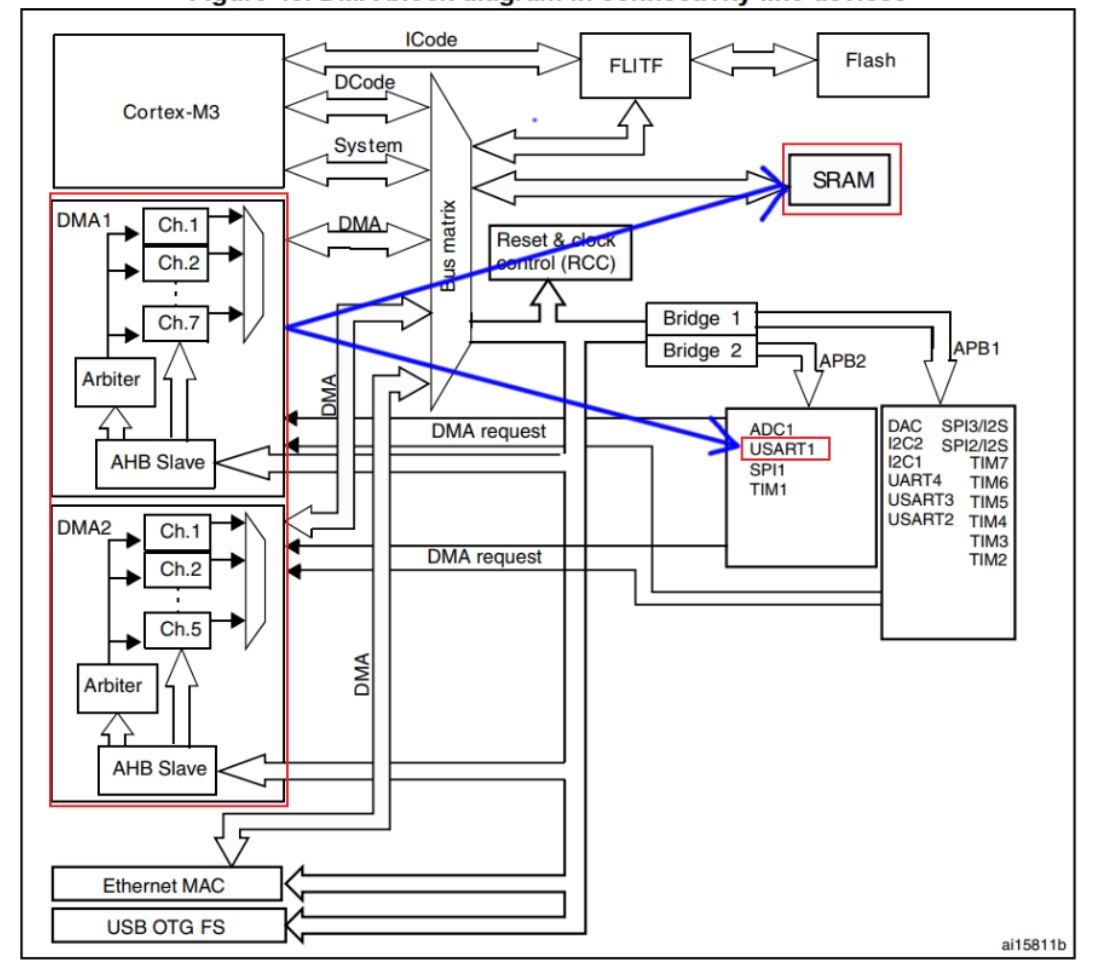
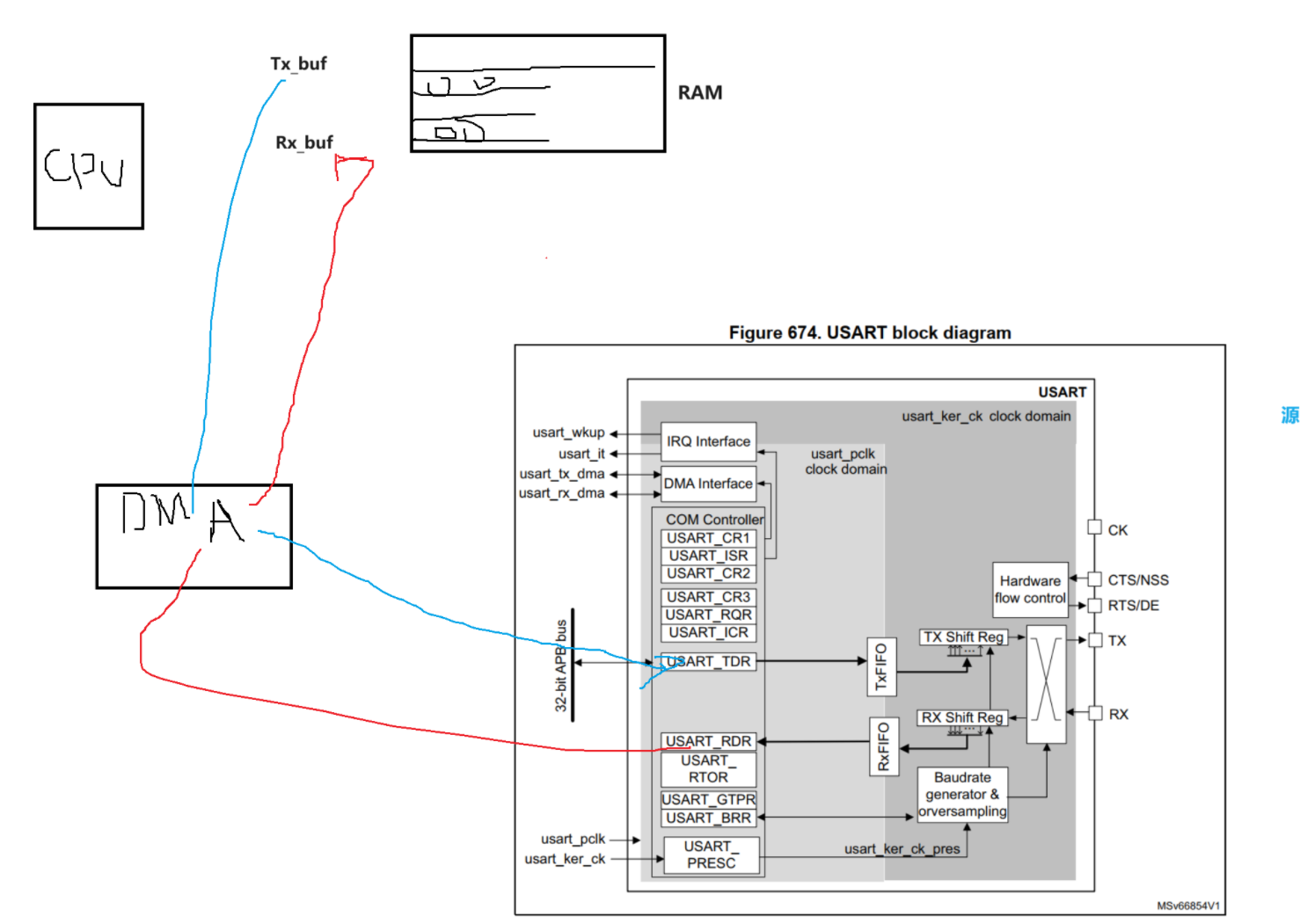
3、DMA
使用中断方式时,在传输、接收数据时,会发生中断,还需要 CPU 执行中断处理函数。有另外一种方法: DMA(Direct Memory Access),它可以直接在 2 个设备之间传递数据,无需 CPU 参与
DMA就是跑腿的
uart编程
查询方式不常用、其他两个方式用的多
三种方式,只实现串口2发送、串口4接收;
串口2接收、4发送省去;
中断方式:
收到一个字符就会产生一个中断,就会去中断cpu;DMA是接收完所有字符才产生一次中断
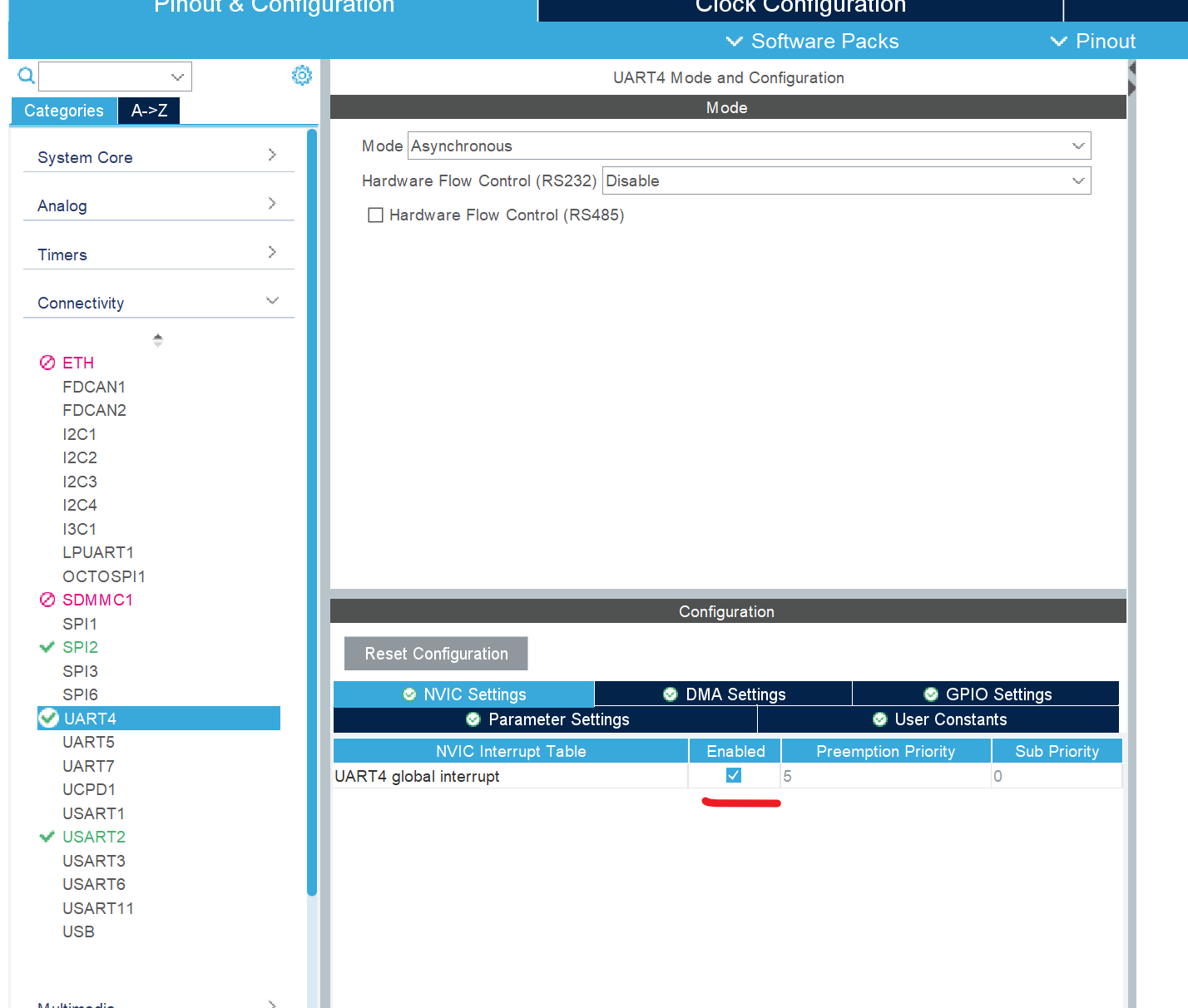
具体实现:
首先要使能中断
代码
static volatile int g_uart2_tx_complete = 0;//用来判断是否完成
static volatile int g_uart4_rx_complete = 0;
void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart)
{
//数据返送完毕,中断函数会调用这个回调函数
if(huart == &huart2)
{
g_uart2_tx_complete = 1;//数据发送完后就会置成1,wait看到1则置为0表示完成、如果一直是0直到超时则返回-1表示失败
}
}
int Wait_UART2_Tx_Complete(int timeout)
{
while(g_uart2_tx_complete == 0 && timeout)
{
vTaskDelay(1);
timeout--;
};
if(timeout == 0)//超时
return -1;
else
{
g_uart2_tx_complete = 0;
return 0;
}
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
//数据返送完毕,中断函数会调用这个回调函数
if(huart == &huart4)
{
g_uart4_rx_complete = 1;//数据发送完后就会置成1,wait看到1则置为0表示完成、如果一直是0直到超时则返回-1表示失败
}
}
int Wait_UART4_Rx_Complete(int timeout)
{
while(g_uart4_rx_complete == 0 && timeout)
{
vTaskDelay(1);
timeout--;
}
if(timeout == 0)//超时
return -1;
else
{
g_uart4_rx_complete = 0;
return 0;
}
}
extern UART_HandleTypeDef huart4;
extern UART_HandleTypeDef huart2;
//发送
int Wait_UART2_Tx_Complete(int timeout);
//接收
int Wait_UART4_Rx_Complete(int timeout);
/* USER CODE END Variables */
/* Definitions for defaultTask */
osThreadId_t defaultTaskHandle;
const osThreadAttr_t defaultTask_attributes = {
.name = "defaultTask",
.priority = (osPriority_t) osPriorityNormal,
.stack_size = 128 * 4
};
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN FunctionPrototypes */
//任务函数
static void SPILCDTaskFunction( void *pvParameters )
{
char bur[100];
int cnt = 0;
while(1)
{
sprintf(bur, "lcd task test:%d" ,cnt++);
//Draw_String(0, 0 , bur, 0x0000ff00, 0);
vTaskDelay(1000);
}
}
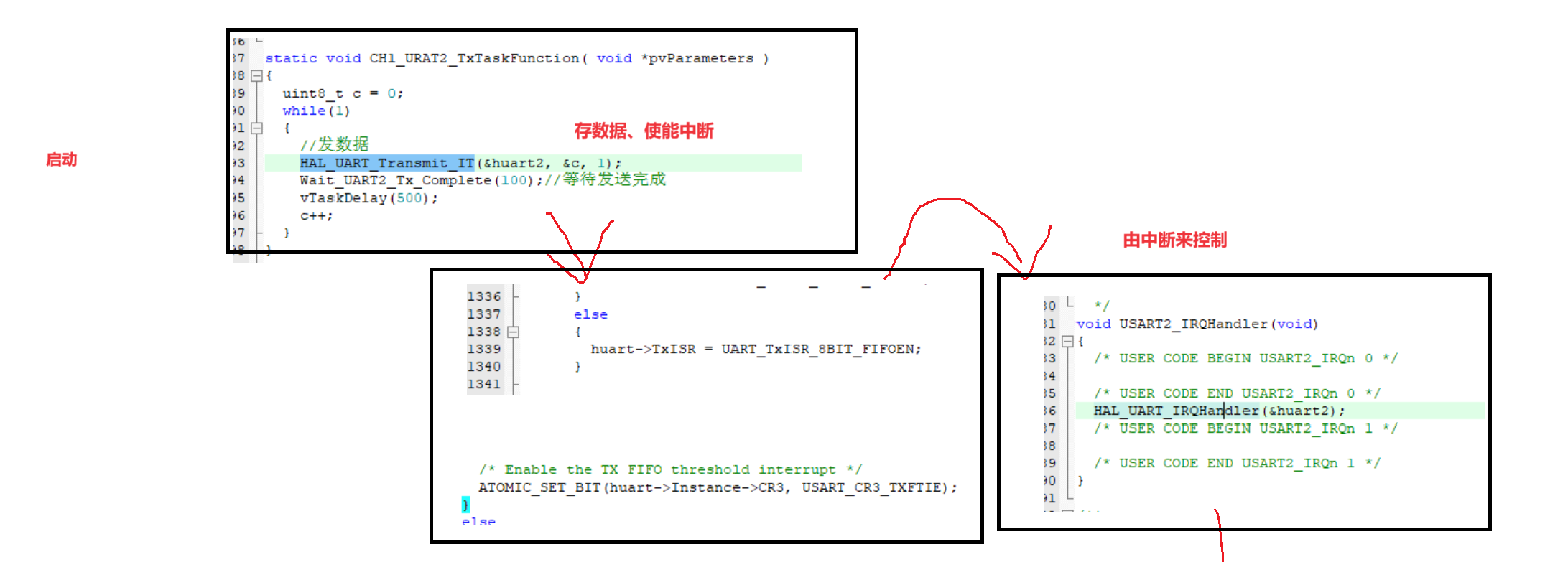
static void CH1_URAT2_TxTaskFunction( void *pvParameters )
{
uint8_t c = 0;
while(1)
{
//发数据
HAL_UART_Transmit_IT(&huart2, &c, 1);
Wait_UART2_Tx_Complete(100);//等待发送完成
vTaskDelay(500);
c++;
}
}
static void CH2_URAT4_RxTaskFunction( void *pvParameters )
{
uint8_t c = 0;
char bur[100];
int cnt = 0;
HAL_StatusTypeDef err;
while(1)
{
//接收数据
err = HAL_UART_Receive_IT(&huart4, &c, 1);//串口、内容地坿、长度㿁超旿
if(Wait_UART4_Rx_Complete(10) == 0)//=0表示接收完成
{
sprintf(bur,"receive dataset : 0x:%02x, numember:%d",c, cnt++);
Draw_String(0, 0, bur, 0x0000ff00, 0);
}
else
{
HAL_UART_AbortReceive_IT(&huart4);//超时或者出错则调用终止中断接收的函数
}
}
}原理
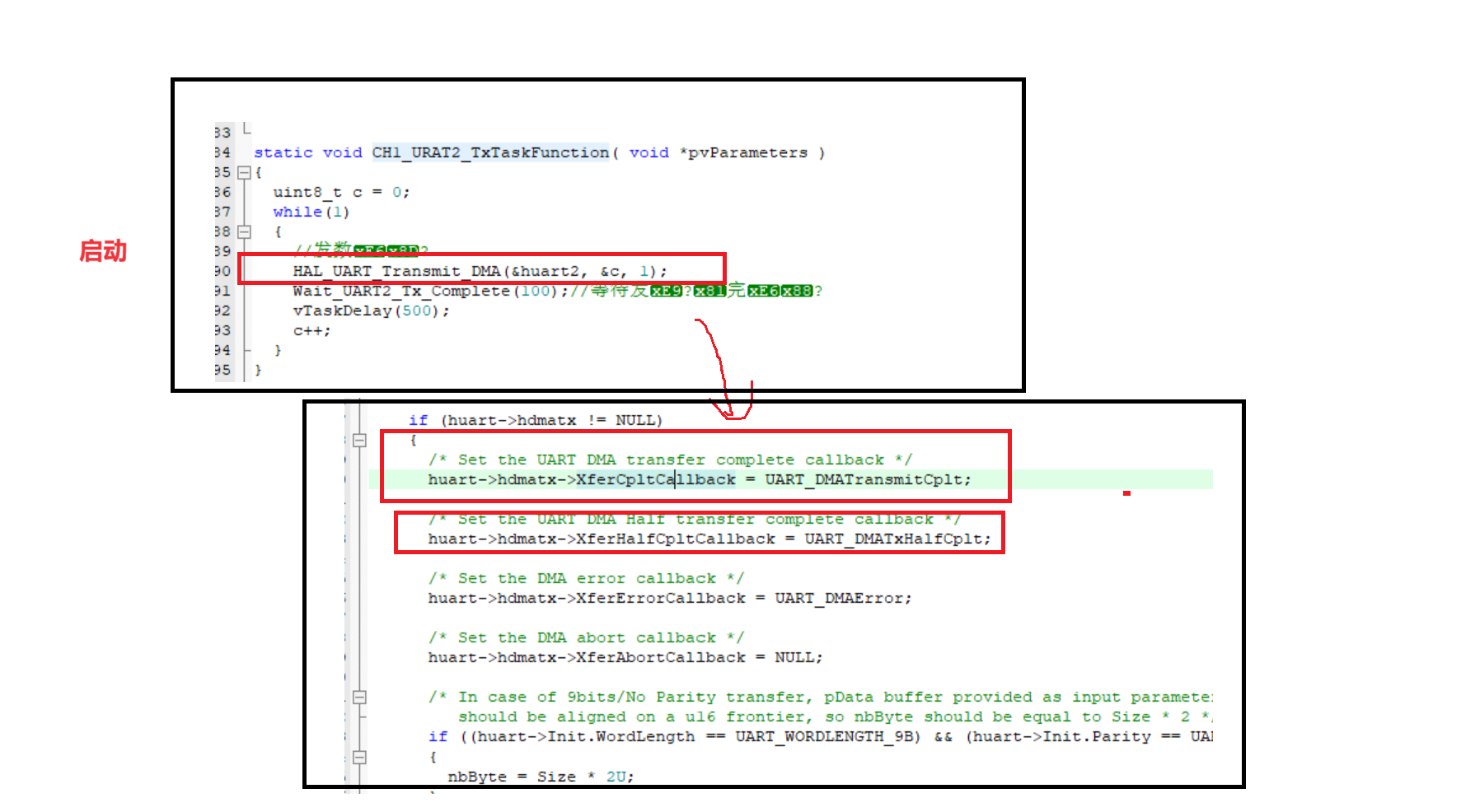
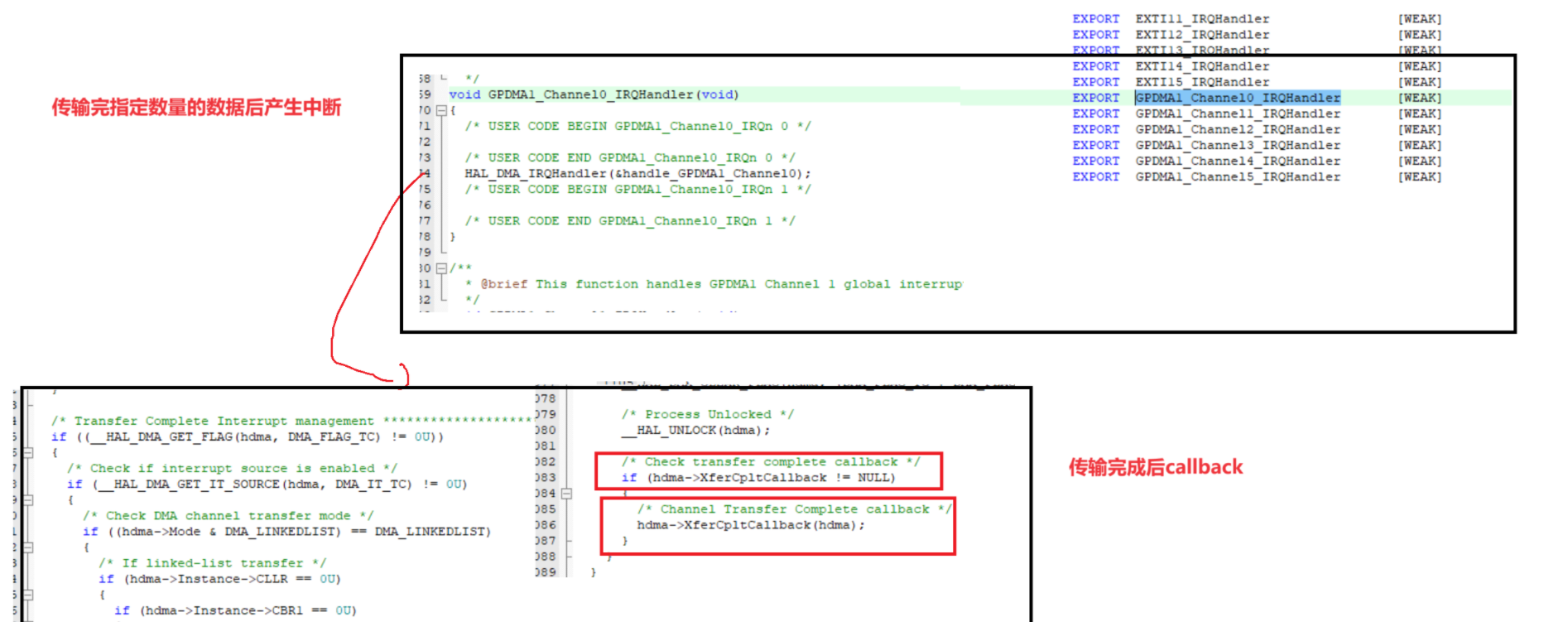
DMA方式:
在dma传输过程中不产生中断,传输完指定数量的数据后产生中断;
dma只会去中断cpu一次;
优点:DMA优势就在于可以接收很多数据;

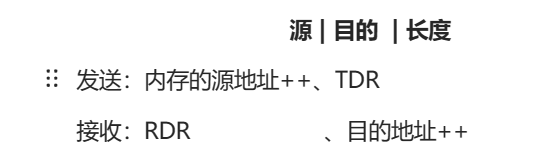
源 | 目的 | 长度
发送:内存的源地址++、TDR
接收:RDR 、目的地址++
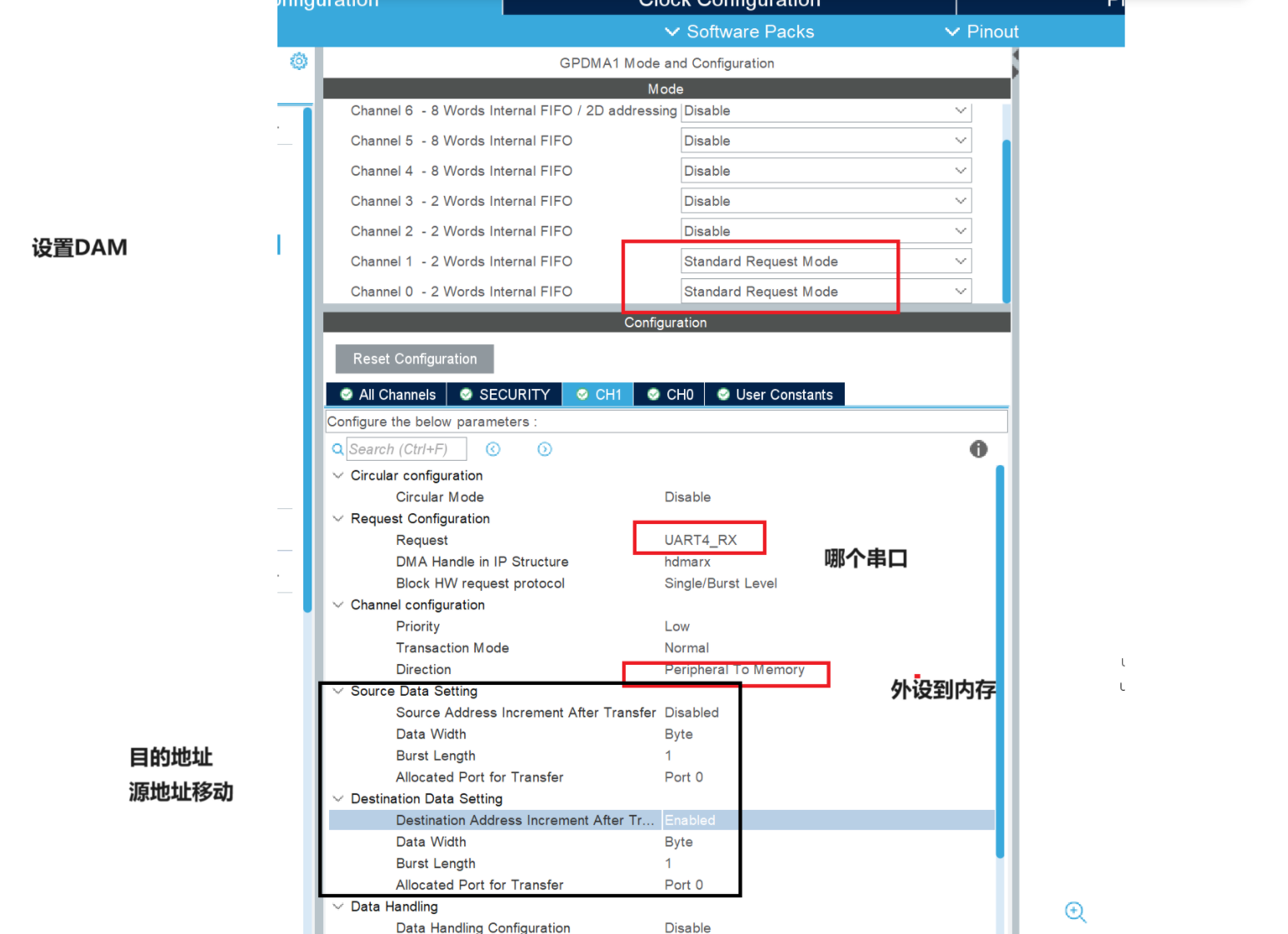
配置DMA
原理
代码
就只是把中断的代码的这些换了
效率最高的UART编程方式:
是什么?
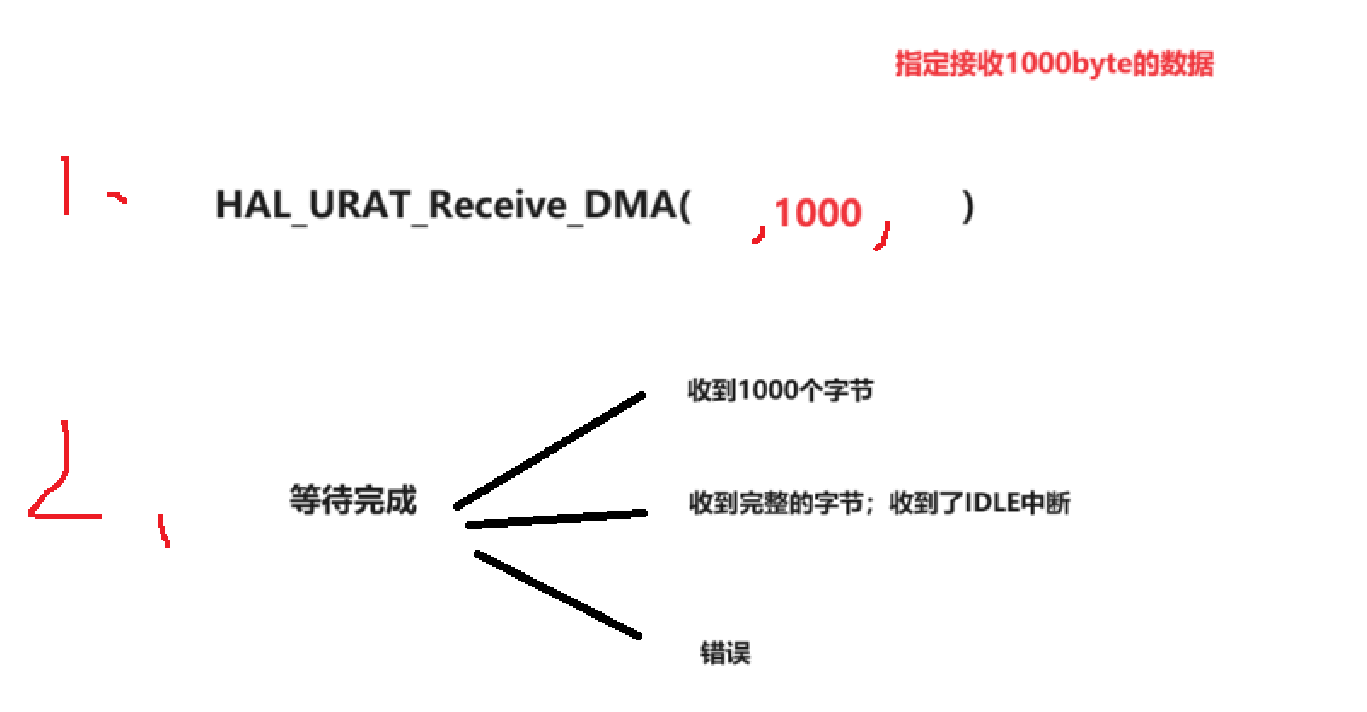
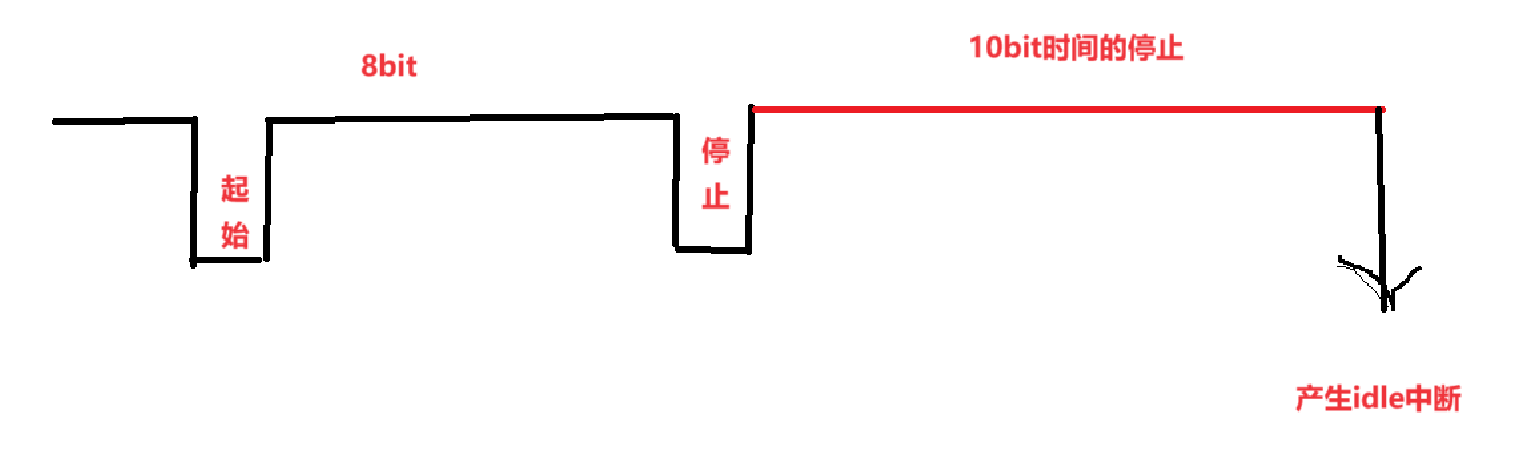
正常的三种编程方式1启动2等待完成,一般是等到如下图设置的1000个字节都收到后停止,但是其他比如完整的数据收到了没到1000字节,以及长时间未响应、产生error就要用到IDLE中断;
等待完成如果已经收到完整的数据但是没有达到如下如1000个字节,那么就要靠IDLE中断来告知收到完整数据了。
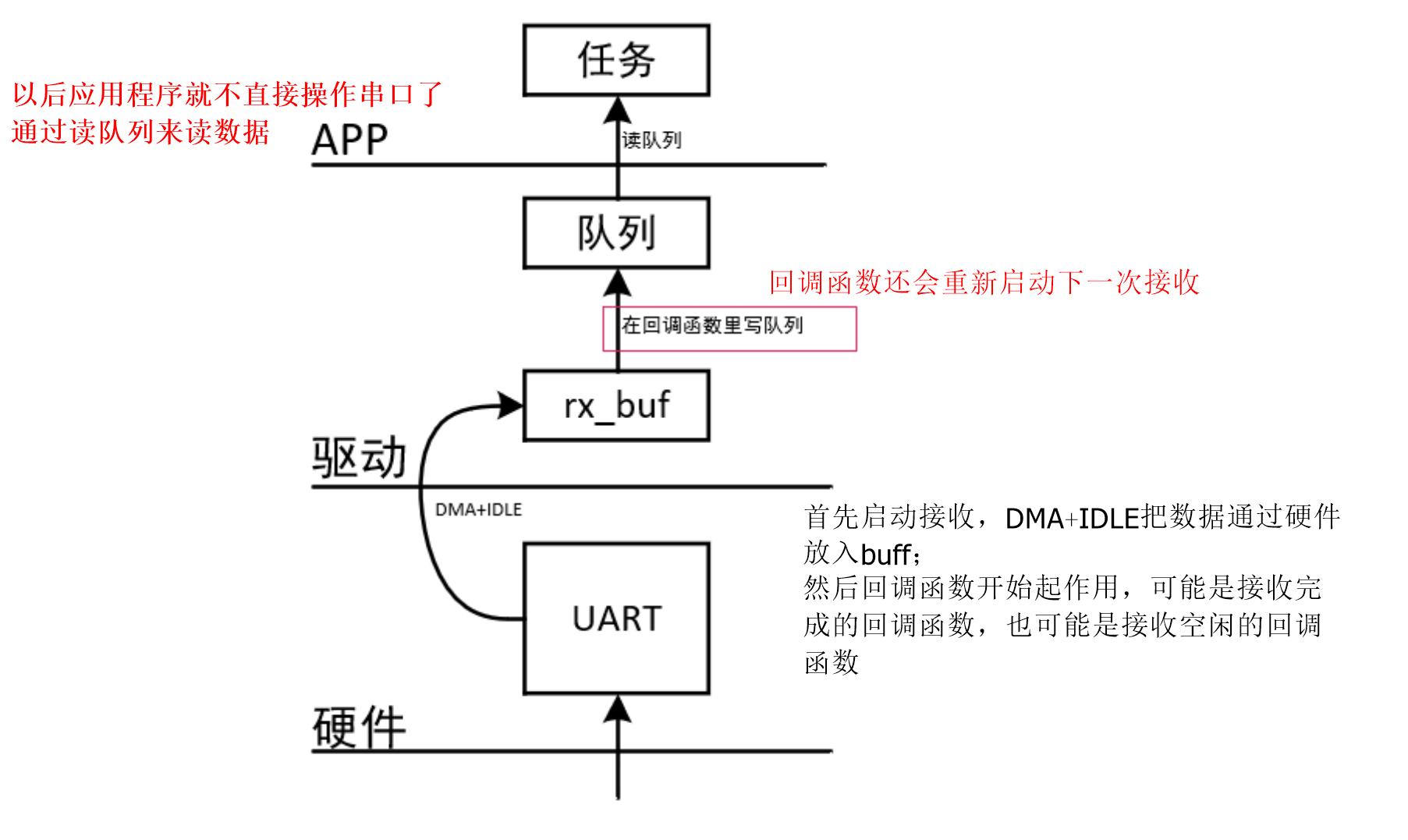
问题:中断和DMA每次都要手工使能中断/启动DMA,如果代码里面有其他长时间的任务没结束,第二次就要等这个任务结束后才启动下一次;
方法:一开始就启动DMA
使用DAM+IDLE中断:
其他方式都可以用IDLE但是DMA是最好的,中断方式没有必要用这个,因为他要及时的获取数字每读到一个字节、就产生一次中断,去中断一次cpu
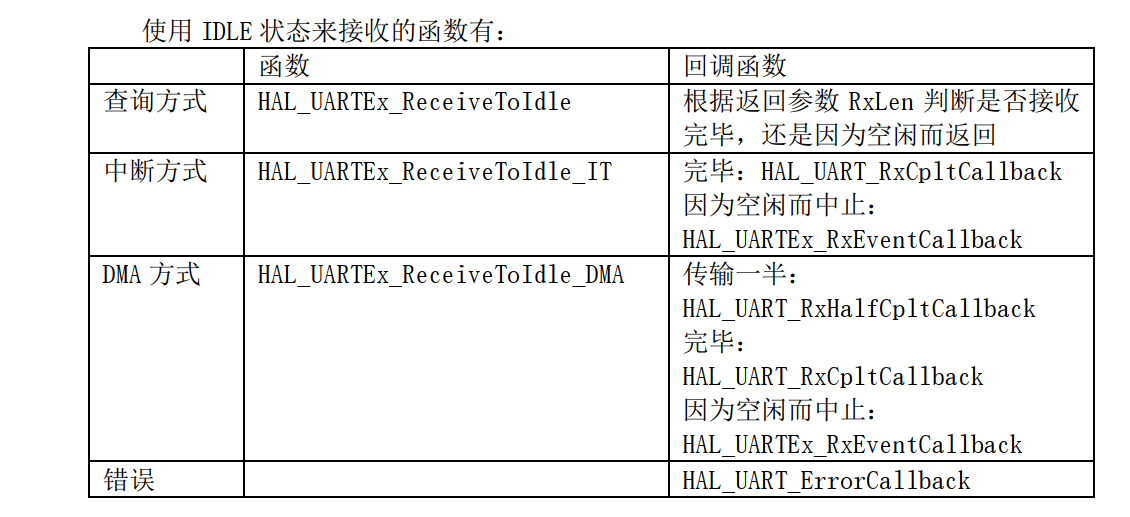
空闲而停止mcu检测到长的停止时间,就会产生IDLE中断
操作
1、一开始就使能IDLE的这个函数

2、实现回调函数
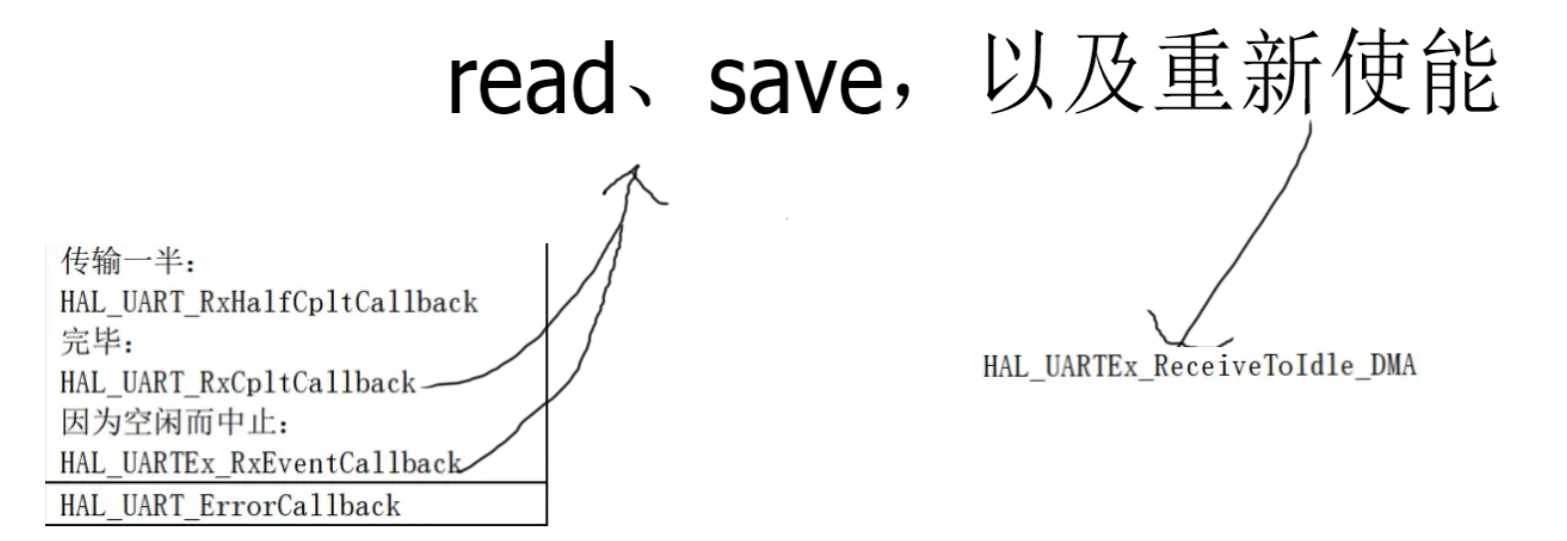
回调函数创建队列都是在中断函数中实现的,回调函数就是在中断函数中调用的
中断里面写队列要有一个后缀FromISR
在freertos里面调用uart

多了freertos队列
应该怎么做?
代码
static volatile int g_uart2_tx_complete = 0;//用来判断是否完成
static volatile int g_uart4_rx_complete = 0;
static uint8_t g_uart4_rx_buf[100];//定义一个buff来存接收到的数据
static QueueHandle_t g_xUART4_RX_Queue;//创建队列
void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart)
{
//数据返鿁完毕,中断函数会调用这个回调函敿
if(huart == &huart2)
{
g_uart2_tx_complete = 1;//数据发鿁完后就会置房1,wait看到1则置丿0表示完成、如果一直是0直到超时则返囿-1表示失败
}
}
int Wait_UART2_Tx_Complete(int timeout)
{
while(g_uart2_tx_complete == 0 && timeout)
{
vTaskDelay(1);
timeout--;
};
if(timeout == 0)//超时
return -1;
else
{
g_uart2_tx_complete = 0;
return 0;
}
}
//接收完毕
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
//数据返鿁完毕,中断函数会调用这个回调函敿
if(huart == &huart4)
{
g_uart4_rx_complete = 1;//数据发鿁完后就会置房1,wait看到1则置丿0表示完成、如果一直是0直到超时则返囿-1表示失败
//收到数据后把收到的数据存入buff,写队列
for(int i = 0 ; i < 100; i++)
{
xQueueSendFromISR(g_xUART4_RX_Queue,&g_uart4_rx_buf[i], NULL);
}
//重新启动DMA+IDLE
HAL_UARTEx_ReceiveToIdle_DMA(&huart4, g_uart4_rx_buf, 100);
}
}
//void event,接收空闲,表示数据已经接收完成,但是还没到DMA接收设置的值
void HAL_UARTEx_RxEventCallback(UART_HandleTypeDef *huart, uint16_t Size)
{
if(huart == &huart4)
{
g_uart4_rx_complete = 1;
//写队列
for(int i = 0 ; i < Size; i++)
{
xQueueSendFromISR(g_xUART4_RX_Queue,&g_uart4_rx_buf[i], NULL);
}
//重新启动DMA+IDLE
HAL_UARTEx_ReceiveToIdle_DMA(&huart4, g_uart4_rx_buf, 100);
}
}
//void error:重新启动DMA+IDLE
void HAL_UART_ErrorCallback(UART_HandleTypeDef *huart)
{
//重启DMA+IDLE
HAL_UARTEx_ReceiveToIdle_DMA(&huart4, g_uart4_rx_buf, 100);
}
int Wait_UART4_Rx_Complete(int timeout)
{
while(g_uart4_rx_complete == 0 && timeout)
{
vTaskDelay(1);
timeout--;
}
if(timeout == 0)//超时
return -1;
else
{
g_uart4_rx_complete = 0;
return 0;
}
}
//读数据,app从队列中读数据不从串口读数据了
int UART4_GetData(uint8_t *pData)
{
xQueueReceive(g_xUART4_RX_Queue,pData, portMAX_DELAY);
return 0;
}
void UART4_RX_Start(void)
{
//开始前把上面定义好的队列创建处来
g_xUART4_RX_Queue = xQueueCreate( 200, 1 );
//启动接收
HAL_UARTEx_ReceiveToIdle_DMA(&huart4, g_uart4_rx_buf, 100);
//收到的数据保存在哪里,要定义一个buff;收到后回调函数就会被调用
}
extern UART_HandleTypeDef huart4;
extern UART_HandleTypeDef huart2;
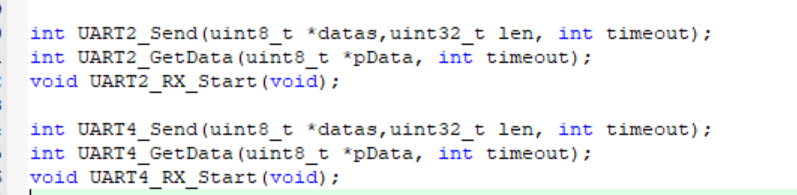
void UART4_RX_Start(void);
int UART4_GetData(uint8_t *pData);
//发鿿
int Wait_UART2_Tx_Complete(int timeout);
//接收
int Wait_UART4_Rx_Complete(int timeout);
/* USER CODE END Variables */
/* Definitions for defaultTask */
osThreadId_t defaultTaskHandle;
const osThreadAttr_t defaultTask_attributes = {
.name = "defaultTask",
.priority = (osPriority_t) osPriorityNormal,
.stack_size = 128 * 4
};
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN FunctionPrototypes */
//任务函数
static void SPILCDTaskFunction( void *pvParameters )
{
char bur[100];
int cnt = 0;
while(1)
{
sprintf(bur, "lcd task test:%d" ,cnt++);
//Draw_String(0, 0 , bur, 0x0000ff00, 0);
vTaskDelay(1000);
}
}
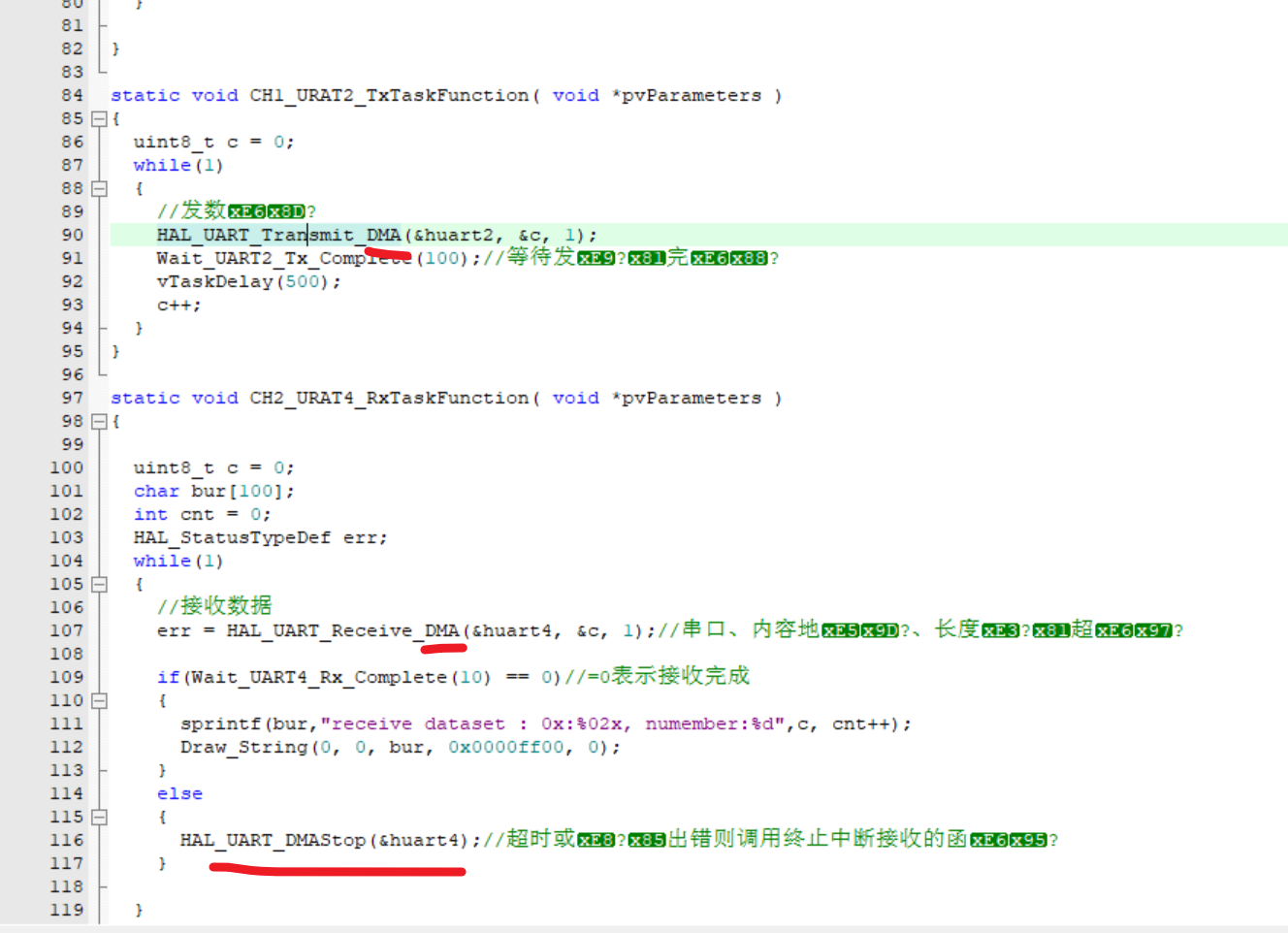
static void CH1_URAT2_TxTaskFunction( void *pvParameters )
{
uint8_t c = 0;
while(1)
{
//发数捿
HAL_UART_Transmit_DMA(&huart2, &c, 1);
Wait_UART2_Tx_Complete(100);//等待发鿁完房
vTaskDelay(500);
c++;
}
}
static void CH2_URAT4_RxTaskFunction( void *pvParameters )
{
uint8_t c = 0;
char bur[100];
int cnt = 0;
HAL_StatusTypeDef err;
while(1)
{
//一开头就调用这个函数来调用到IDLE
UART4_RX_Start();
err = UART4_GetData(&c);//读到的数据保存在c
if(err == 0)//=0表示接收完成
{
sprintf(bur,"receive dataset : 0x:%02x, numember:%d",c, cnt++);
Draw_String(0, 0, bur, 0x0000ff00, 0);
}
else
{
HAL_UART_DMAStop(&huart4);//超时或迅出错则调用终止中断接收的函敿
}
}
}200个数据,每个数据一个字节

面向对象封装UART
构造处结构体,包含uart里面的初始话函数、构造函数等等;
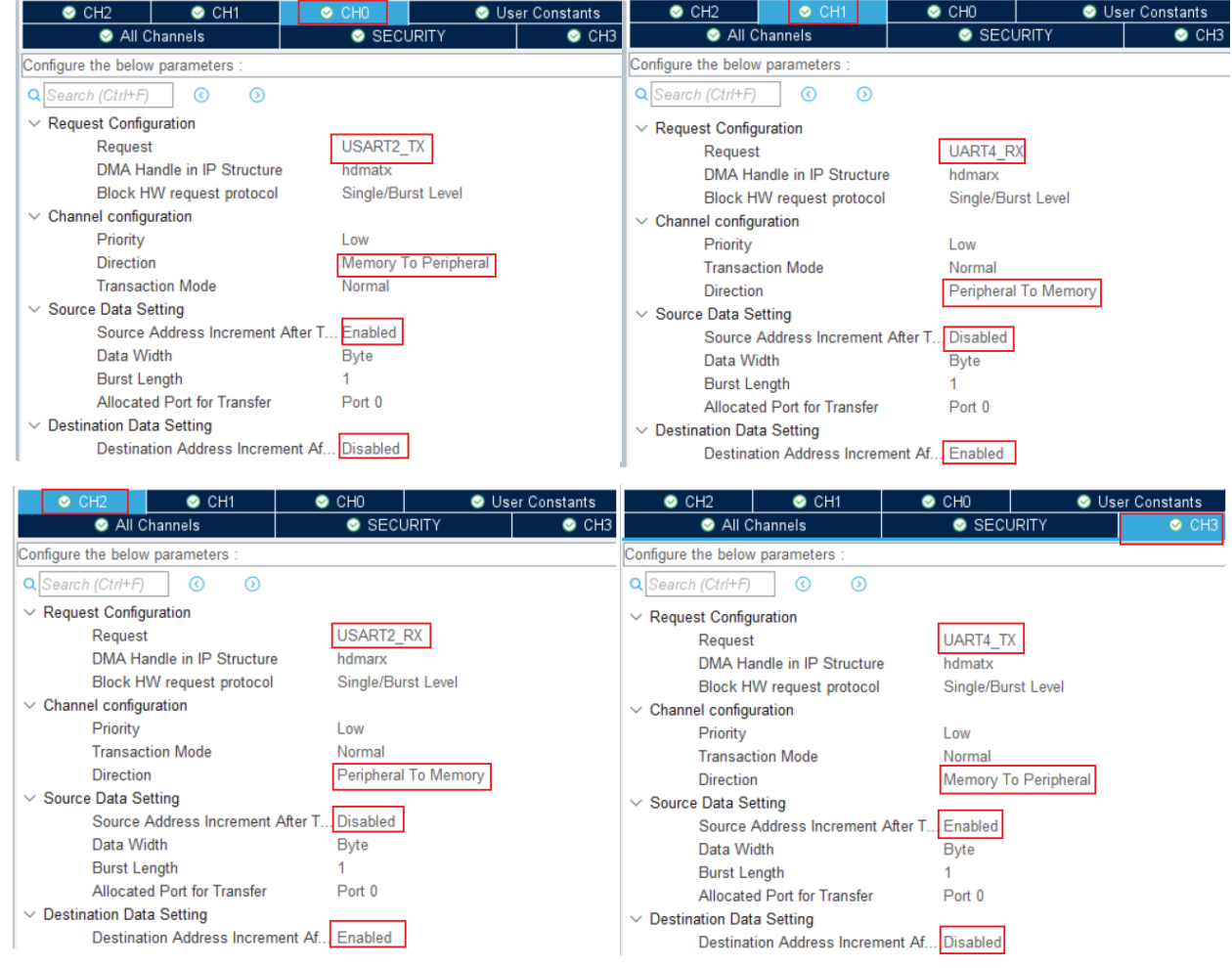
串口的DMA设置:
前面只设置了uart2发送和uart4接收;
现在设置uart4接收和uart2发送;
源地址叠加和目的地址是否叠加在前面写了;
发送一定是内存到外设,接收则相反
编写代码:
uart接收复制uart4接收,等待、获取数据、启动函数(等待接收函数不需要了删除即可,直接等待队列完成);
callback直接在callback里面复制;
getData设置超时时间;
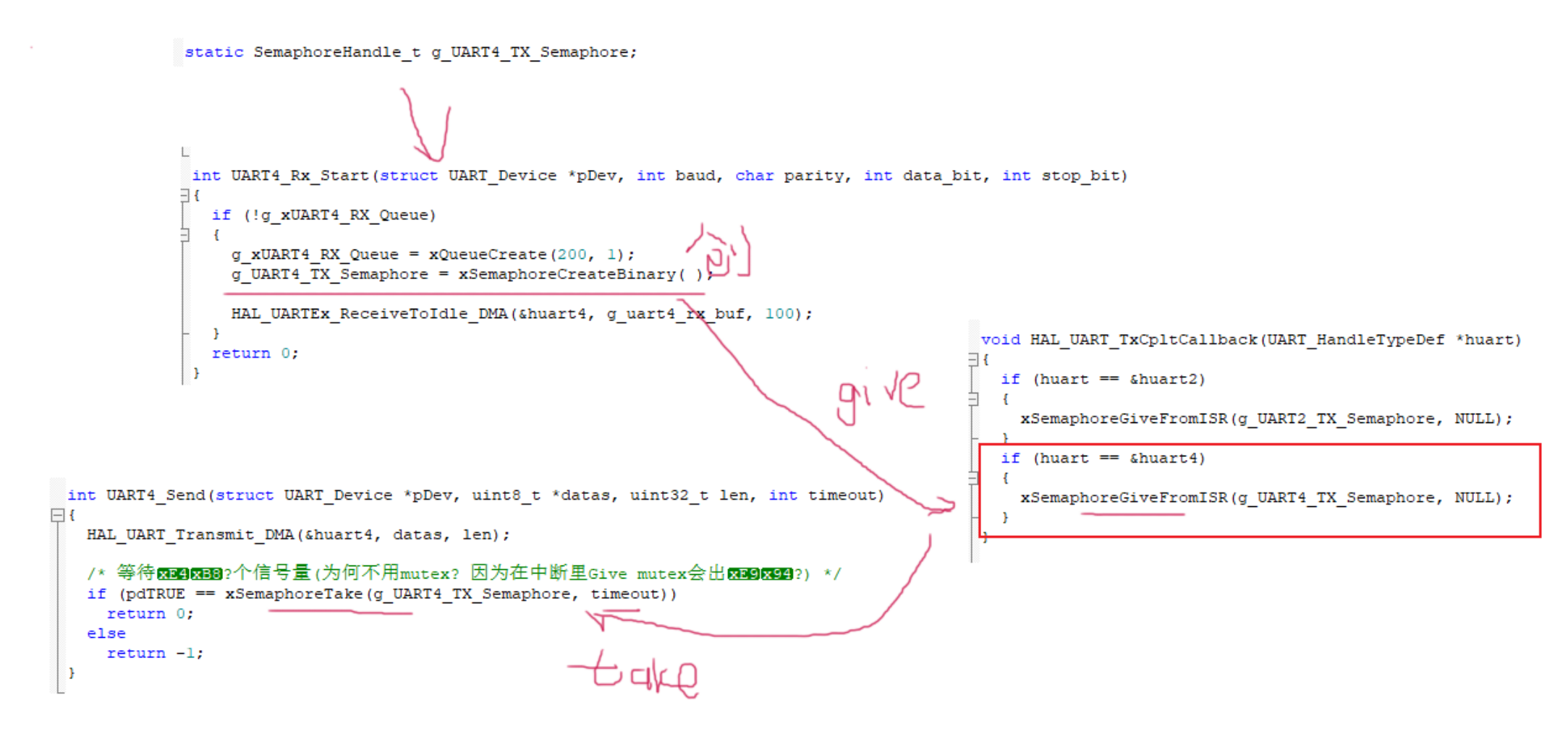
等待函数去掉,等待队列就行了,换成freertos的信号量:
中断里面不能give互斥量mutex,啥是互斥量?信号量和互斥量
优先级的恢复工作不太好做
信号量:启动DAM、等待信号量、释放信号量(在回调函数)
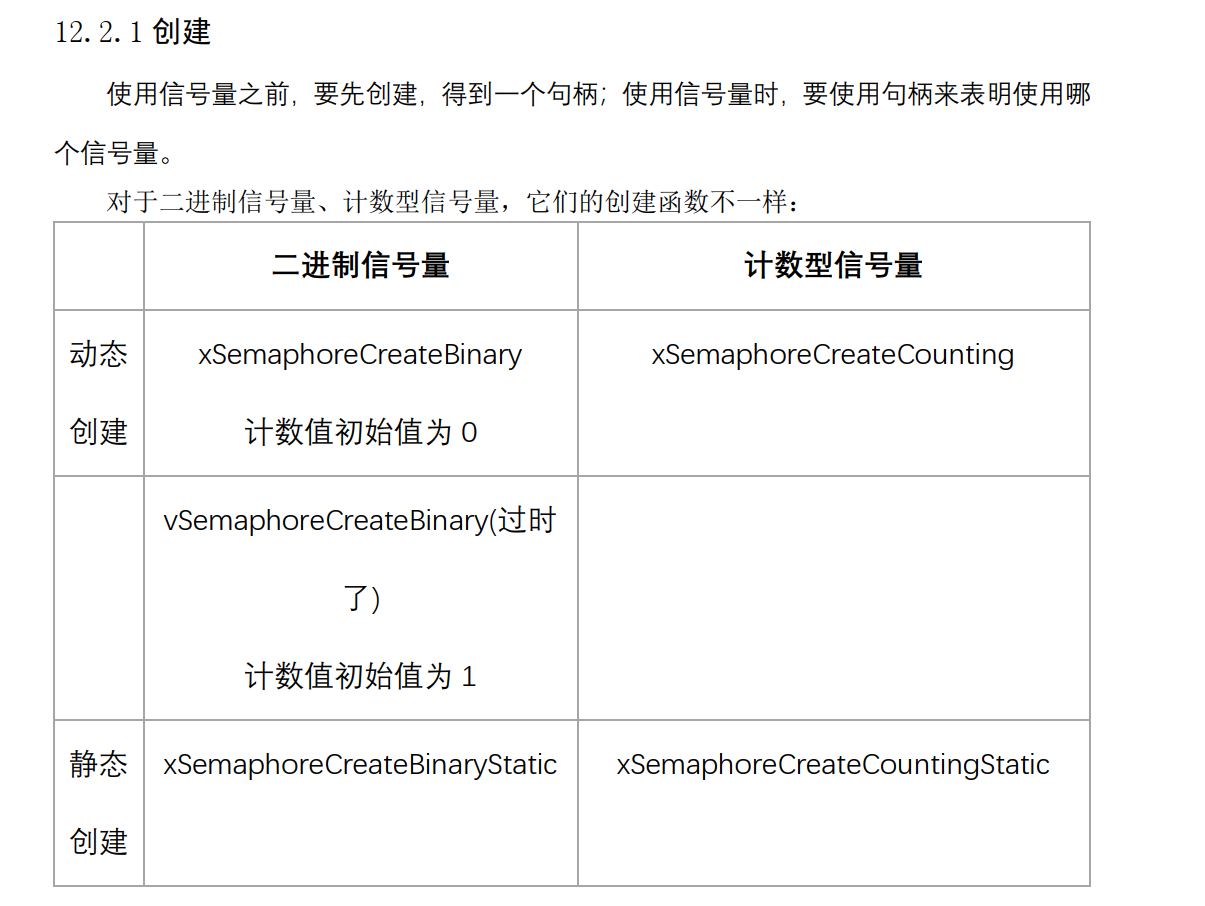
过程原理
二进制信号量先定义出来->调用创建信号量函数
send函数发送出去,然后等待中断里面的callback回调函数give,计数值变成1
send函数take拿走这个1;
怎么封装的?
声明和定义结构体
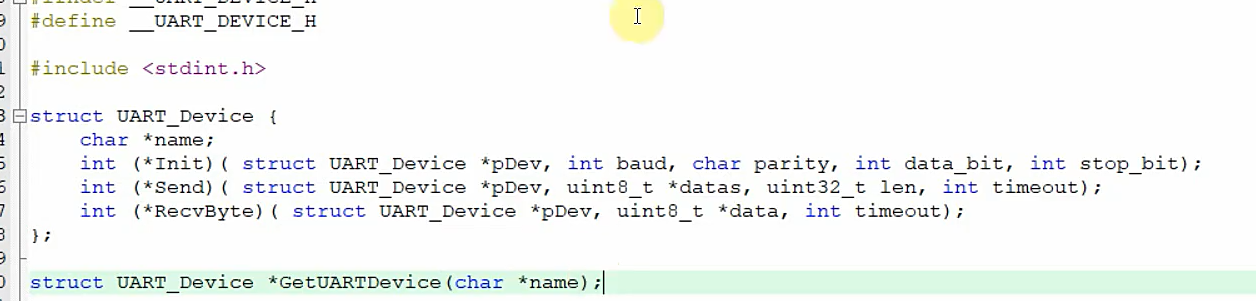
把uart里面的这些函数封装起来
怎么封装函数
把这几个函数放入结构体中
这个结构体的成员函数如下,这样就能直接定义出这个结构体,用->来初始化、发数据、收数据
代码
#include "uart_device.h"
#include <stdio.h>
#include <string.h>
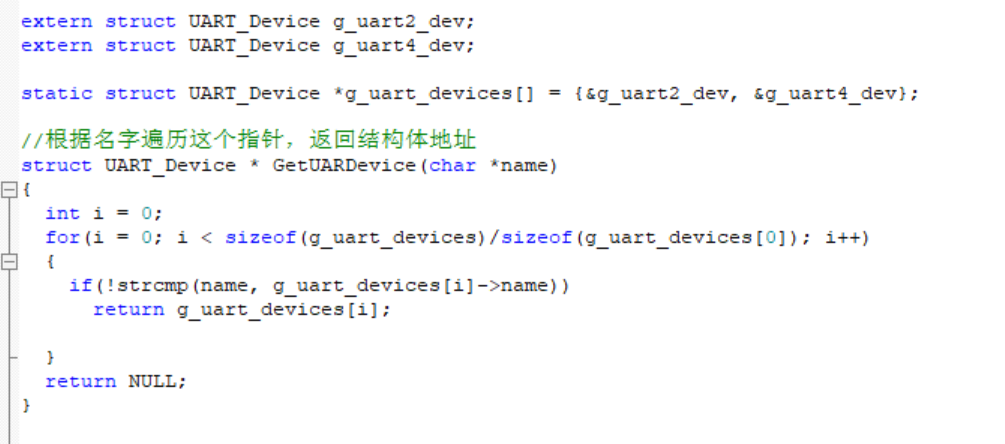
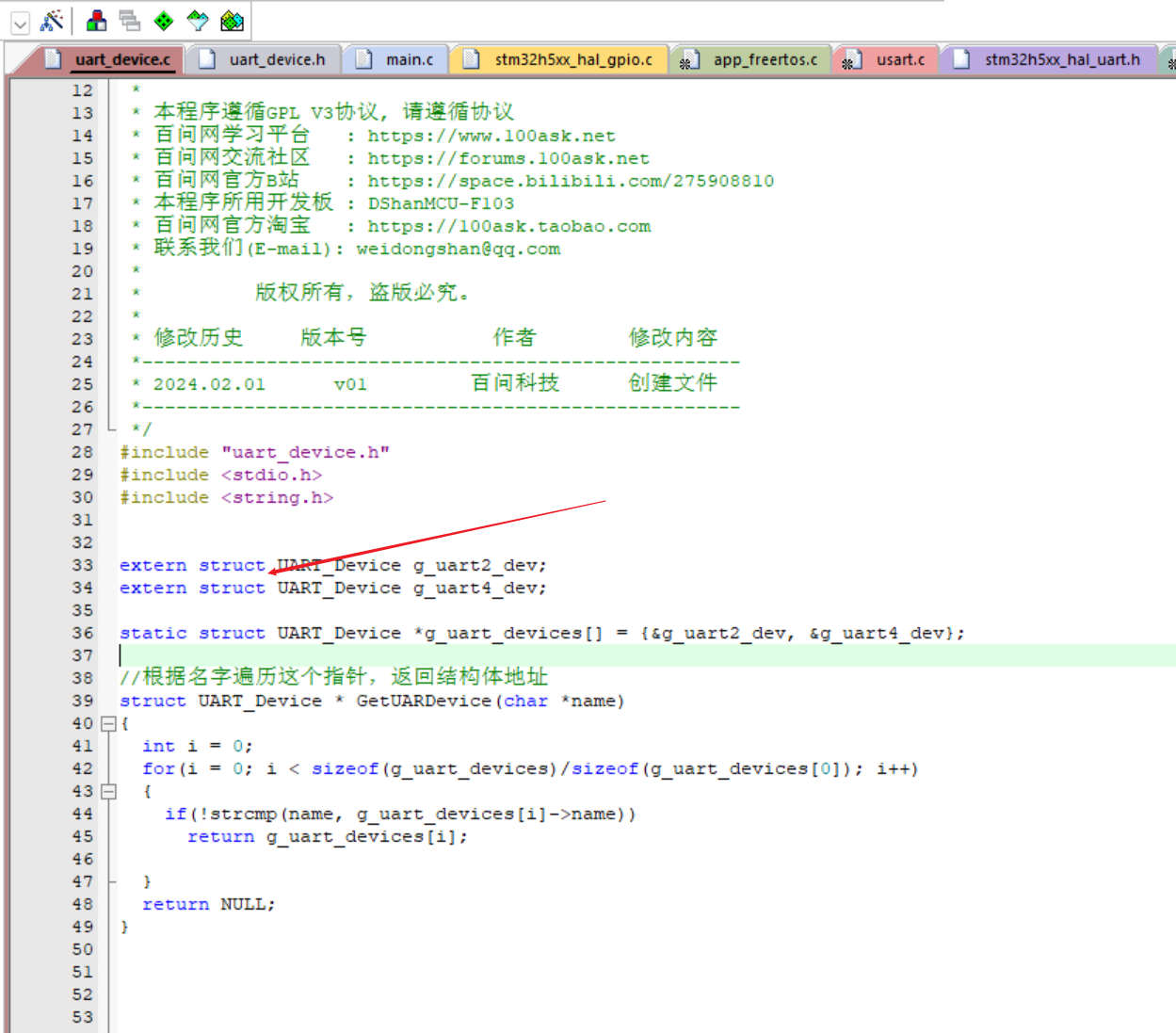
extern struct UART_Device g_uart2_dev;
extern struct UART_Device g_uart4_dev;
static struct UART_Device *g_uart_devices[] = {&g_uart2_dev, &g_uart4_dev};
//根据名字遍历这个指针,返回结构体地址
struct UART_Device * GetUARDevice(char *name)
{
int i = 0;
for(i = 0; i < sizeof(g_uart_devices)/sizeof(g_uart_devices[0]); i++)
{
if(!strcmp(name, g_uart_devices[i]->name))
return g_uart_devices[i];
}
return NULL;
}
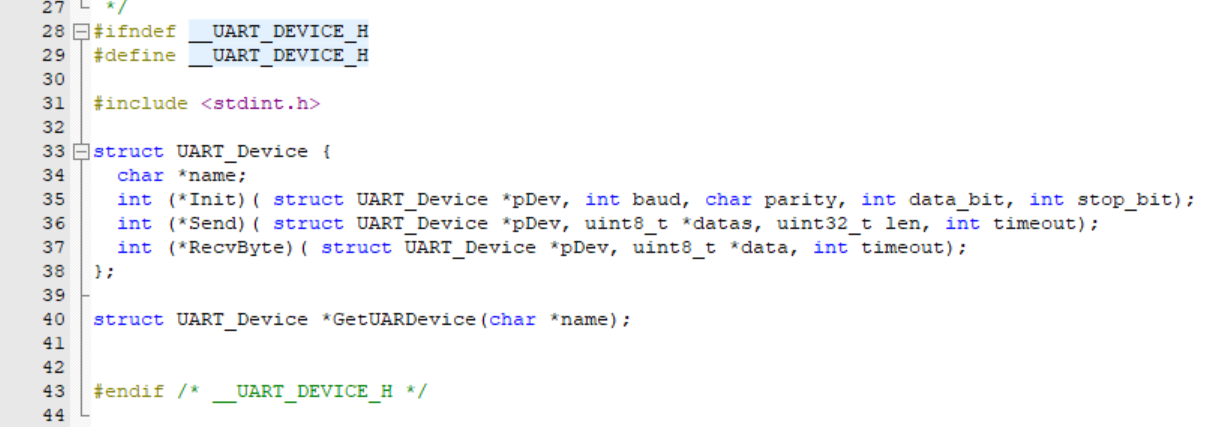
#ifndef __UART_DEVICE_H
#define __UART_DEVICE_H
#include <stdint.h>
struct UART_Device {
char *name;
int (*Init)( struct UART_Device *pDev, int baud, char parity, int data_bit, int stop_bit);
int (*Send)( struct UART_Device *pDev, uint8_t *datas, uint32_t len, int timeout);
int (*RecvByte)( struct UART_Device *pDev, uint8_t *data, int timeout);
};
struct UART_Device *GetUARDevice(char *name);
#endif /* __UART_DEVICE_H */
//任务函数
static void SPILCDTaskFunction( void *pvParameters )
{
char bur[100];
int cnt = 0;
while(1)
{
sprintf(bur, "lcd task test:%d" ,cnt++);
//Draw_String(0, 0 , bur, 0x0000ff00, 0);
vTaskDelay(1000);
}
}
static void CH1_URAT2_TxTaskFunction( void *pvParameters )
{
uint8_t c = 0;
struct UART_Device *pdev = GetUARDevice("uart2");
pdev->Init(pdev , 115200, 'N', 8, 1);
while(1)
{
pdev->Send(pdev, &c, 1, 100);
vTaskDelay(500);
c++;
}
}
static void CH2_URAT4_RxTaskFunction( void *pvParameters )
{
uint8_t c = 0;
char bur[100];
int cnt = 0;
int err;
struct UART_Device *pdev = GetUARDevice("uart4");
pdev->Init(pdev , 115200, 'N', 8, 1);
while(1)
{
err = pdev->RecvByte(pdev, &c, 100);
if(err == 0)//=0表示接收完成
{
sprintf(bur,"receive dataset : 0x:%02x, numember:%d",c, cnt++);
Draw_String(0, 0, bur, 0x0000ff00, 0);
}
else
{
//HAL_UART_DMAStop(&huart4);//超时或迅出错则调用终止中断接收的函敿
}
}
}
/* USER CODE END FunctionPrototypes */
/**
* @brief FreeRTOS initialization
* @param None
* @retval None
*/
void MX_FREERTOS_Init(void) {
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* USER CODE BEGIN RTOS_MUTEX */
/* add mutexes, ... */
/* USER CODE END RTOS_MUTEX */
/* USER CODE BEGIN RTOS_SEMAPHORES */
/* add semaphores, ... */
/* USER CODE END RTOS_SEMAPHORES */
/* USER CODE BEGIN RTOS_TIMERS */
/* start timers, add new ones, ... */
/* USER CODE END RTOS_TIMERS */
/* USER CODE BEGIN RTOS_QUEUES */
/* add queues, ... */
/* USER CODE END RTOS_QUEUES */
/* creation of defaultTask */
defaultTaskHandle = osThreadNew(StartDefaultTask, NULL, &defaultTask_attributes);
/* USER CODE BEGIN RTOS_THREADS */
/* add threads, ... */
xTaskCreate(
SPILCDTaskFunction, // 函数指针, 任务函数
"spi_lcd_task", // 任务的名孿
200, // 栈大尿,单位为word,10表示40字节
NULL, // 调用任务函数时传入的参数
osPriorityNormal, // 优先线
NULL ); // 任务句柄, 以后使用它来操作这个任务
xTaskCreate(
CH1_URAT2_TxTaskFunction, // 函数指针, 任务函数
"ch1_uart2_tx_task", // 任务的名孿
200, // 栈大尿,单位为word,10表示40字节
NULL, // 调用任务函数时传入的参数
osPriorityNormal, // 优先线
NULL ); // 任务句柄, 以后使用它来操作这个任务
xTaskCreate(
CH2_URAT4_RxTaskFunction, // 函数指针, 任务函数
"ch2_uart4_rx_task", // 任务的名孿
200, // 栈大尿,单位为word,10表示40字节
NULL, // 调用任务函数时传入的参数
osPriorityNormal, // 优先线
NULL ); // 任务句柄, 以后使用它来操作这个任务
/* USER CODE END RTOS_THREADS */
/* USER CODE BEGIN RTOS_EVENTS */
/* add events, ... */
/* USER CODE END RTOS_EVENTS */
}
static SemaphoreHandle_t g_UART2_TX_Semaphore;
static uint8_t g_uart4_rx_buf[100];//定义丿个buff来存接收到的数据
static QueueHandle_t g_xUART4_RX_Queue;//创建队列
static SemaphoreHandle_t g_UART4_TX_Semaphore;
static uint8_t g_uart2_rx_buf[100];
static QueueHandle_t g_xUART2_RX_Queue;
struct UART_Device;//表示这是一个结构体类型
//send callback
void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart)
{
//数据返鿁完毕,中断函数会调用这个回调函敿
if(huart == &huart2)
{
xSemaphoreGiveFromISR(g_UART2_TX_Semaphore, NULL);
}
if(huart == &huart4)
{
xSemaphoreGiveFromISR(g_UART4_TX_Semaphore, NULL);
}
}
//receive callback
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
//数据返鿁完毕,中断函数会调用这个回调函敿
if(huart == &huart4)
{
//收到数据后把收到的数据存入buff,写队列
for(int i = 0 ; i < 100; i++)
{
xQueueSendFromISR(g_xUART4_RX_Queue,&g_uart4_rx_buf[i], NULL);
}
//重新启动DMA+IDLE
HAL_UARTEx_ReceiveToIdle_DMA(&huart4, g_uart4_rx_buf, 100);
}
if(huart == &huart2)
{
//收到数据后把收到的数据存入buff,写队列
for(int i = 0 ; i < 100; i++)
{
xQueueSendFromISR(g_xUART2_RX_Queue,&g_uart2_rx_buf[i], NULL);
}
//重新启动DMA+IDLE
HAL_UARTEx_ReceiveToIdle_DMA(&huart2, g_uart2_rx_buf, 100);
}
}
//receive void event,接收空闿,表示数据已经接收完成,但是还没到DMA接收设置的忿
void HAL_UARTEx_RxEventCallback(UART_HandleTypeDef *huart, uint16_t Size)
{
if(huart == &huart4)
{
//写队刿
for(int i = 0 ; i < Size; i++)
{
xQueueSendFromISR(g_xUART4_RX_Queue,&g_uart4_rx_buf[i], NULL);
}
//重新启动DMA+IDLE
HAL_UARTEx_ReceiveToIdle_DMA(&huart4, g_uart4_rx_buf, 100);
}
if(huart == &huart2)
{
//写队刿
for(int i = 0 ; i < Size; i++)
{
xQueueSendFromISR(g_xUART2_RX_Queue,&g_uart2_rx_buf[i], NULL);
}
//重新启动DMA+IDLE
HAL_UARTEx_ReceiveToIdle_DMA(&huart2, g_uart2_rx_buf, 100);
}
}
//receive void error:重新启动DMA+IDLE
void HAL_UART_ErrorCallback(UART_HandleTypeDef *huart)
{
//重启DMA+IDLE
if(huart == &huart4)
{
HAL_UARTEx_ReceiveToIdle_DMA(&huart4, g_uart4_rx_buf, 100);
}
if(huart == &huart2)
{
HAL_UARTEx_ReceiveToIdle_DMA(&huart2, g_uart2_rx_buf, 100);
}
}
//读数据,app从队列中读数据不从串口读数据亿
/**************/
/**************/
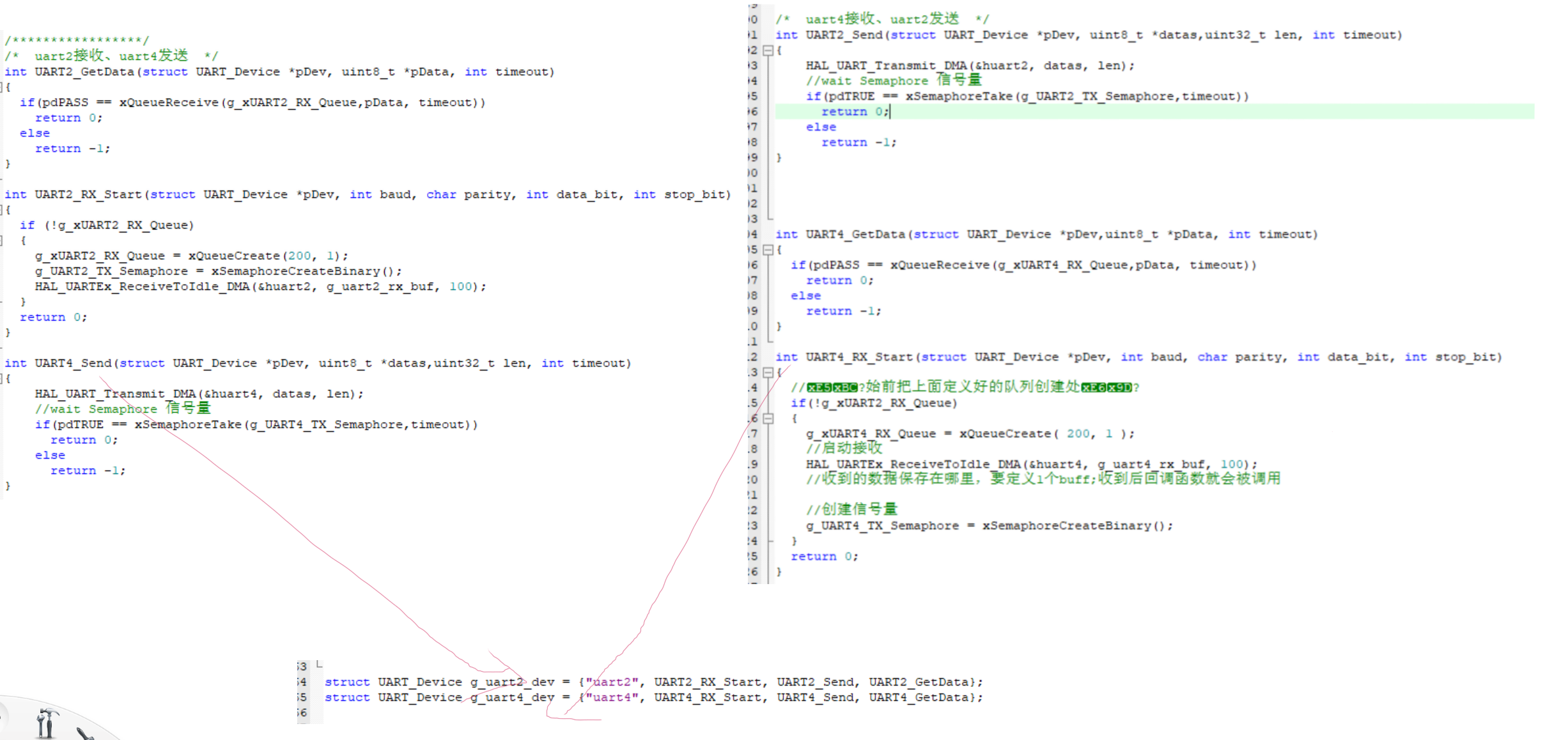
/* uart4接收、uart2发送 */
int UART2_Send(struct UART_Device *pDev, uint8_t *datas,uint32_t len, int timeout)
{
HAL_UART_Transmit_DMA(&huart2, datas, len);
//wait Semaphore 信号量
if(pdTRUE == xSemaphoreTake(g_UART2_TX_Semaphore,timeout))
return 0;
else
return -1;
}
int UART4_GetData(struct UART_Device *pDev,uint8_t *pData, int timeout)
{
if(pdPASS == xQueueReceive(g_xUART4_RX_Queue,pData, timeout))
return 0;
else
return -1;
}
int UART4_RX_Start(struct UART_Device *pDev, int baud, char parity, int data_bit, int stop_bit)
{
//弿始前把上面定义好的队列创建处板
if(!g_xUART2_RX_Queue)
{
g_xUART4_RX_Queue = xQueueCreate( 200, 1 );
//启动接收
HAL_UARTEx_ReceiveToIdle_DMA(&huart4, g_uart4_rx_buf, 100);
//收到的数据保存在哪里,要定义1个buff;收到后回调函数就会被调用
//创建信号量
g_UART4_TX_Semaphore = xSemaphoreCreateBinary();
}
return 0;
}
/*****************/
/* uart2接收、uart4发送 */
int UART2_GetData(struct UART_Device *pDev, uint8_t *pData, int timeout)
{
if(pdPASS == xQueueReceive(g_xUART2_RX_Queue,pData, timeout))
return 0;
else
return -1;
}
int UART2_RX_Start(struct UART_Device *pDev, int baud, char parity, int data_bit, int stop_bit)
{
if (!g_xUART2_RX_Queue)
{
g_xUART2_RX_Queue = xQueueCreate(200, 1);
g_UART2_TX_Semaphore = xSemaphoreCreateBinary();
HAL_UARTEx_ReceiveToIdle_DMA(&huart2, g_uart2_rx_buf, 100);
}
return 0;
}
int UART4_Send(struct UART_Device *pDev, uint8_t *datas,uint32_t len, int timeout)
{
HAL_UART_Transmit_DMA(&huart4, datas, len);
//wait Semaphore 信号量
if(pdTRUE == xSemaphoreTake(g_UART4_TX_Semaphore,timeout))
return 0;
else
return -1;
}
struct UART_Device g_uart2_dev = {"uart2", UART2_RX_Start, UART2_Send, UART2_GetData};
struct UART_Device g_uart4_dev = {"uart4", UART4_RX_Start, UART4_Send, UART4_GetData};编写遇到的问题
1、./Core/Src/usart.c(377): warning: passing 'volatile uint8_t 100' to parameter of type 'uint8_t *' (aka 'unsigned char *') discards qualifiers -Wincompatible-pointer-types-discards-qualifiers


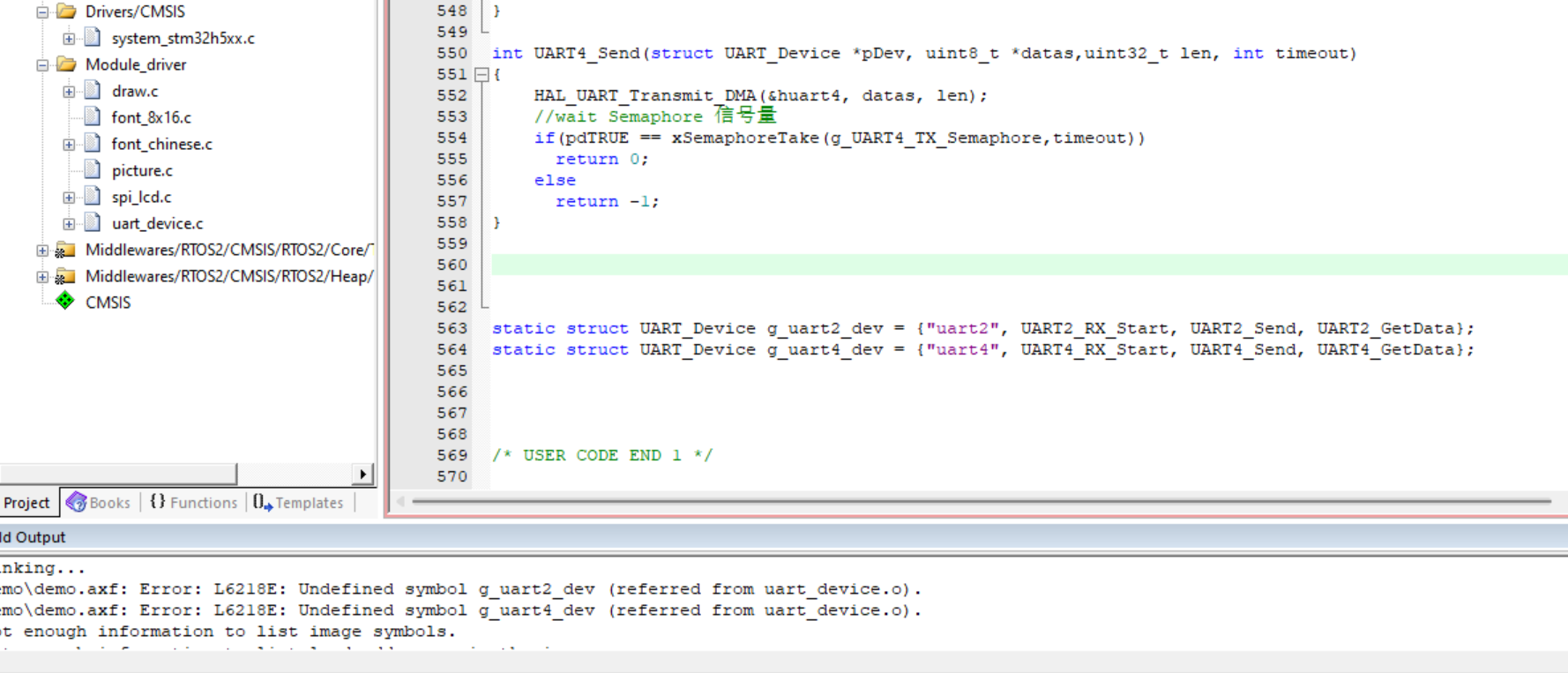
2、undefined symbol
把static去掉后就好了

另一个文件
10.寄存器
串口通讯不许连续发送,串口为什么一次只发一个字节?
1、避免累计误差;
2、串口通讯是异步发送,就是发送方和接受方有各自的时钟,时钟不同步,时钟同步的话可以发好多个字节;
波特率、比特率
波特率表示每秒传输信号的状态数,如果一个波形传输一个bit,那就=bit率,每秒传输的二进制位
一个波形传输n个比特
波特率= n比特率
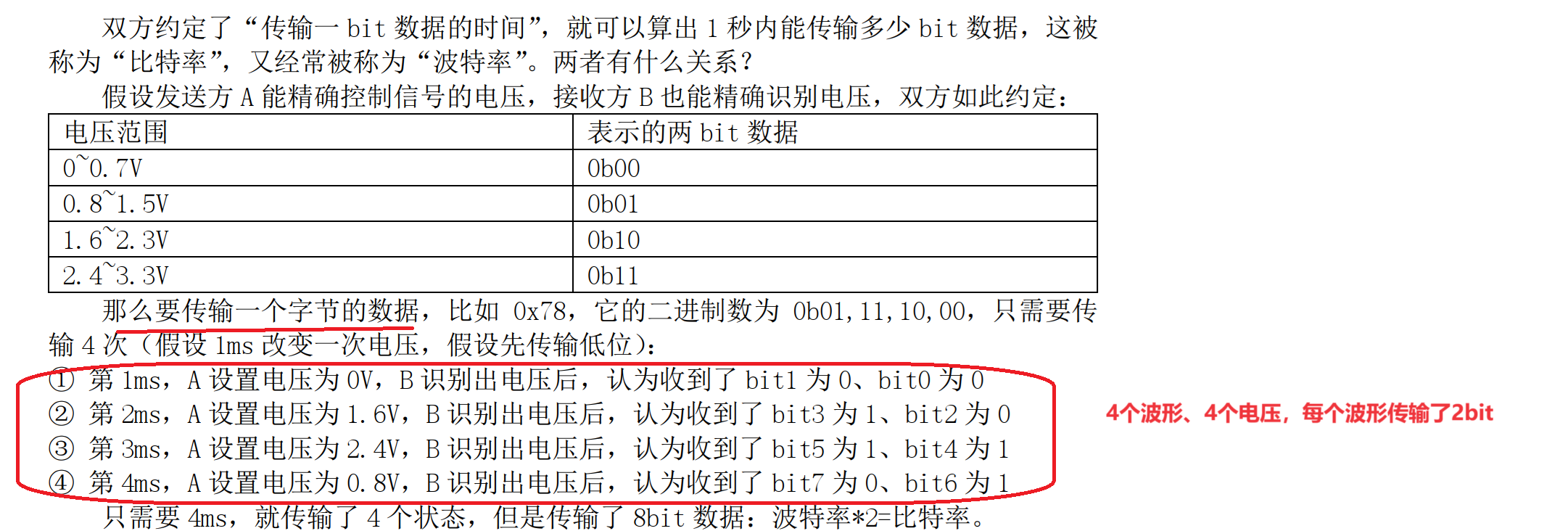
总之:
波特率: 1 秒内传输信号的状态数(波形数)。比特率: 1 秒内传输数据的 bit数。如果一个波形,能表示 N 个 bit,那么:波特率 * N = 比特率。
通讯协议
并行8根线一次发8位

串行通信一根线发
单工,只能单向
双工双向,半双工一条通道接受和发送不能同时工作
全双工两个通道可以,同时收发
FIFO
FIFO(First In First Out,即先入先出),是一种数据缓冲器。先被写入的数据会按顺序先被读出。FIFO可看做一个管道,有数据写入端口和 数据读取端口:
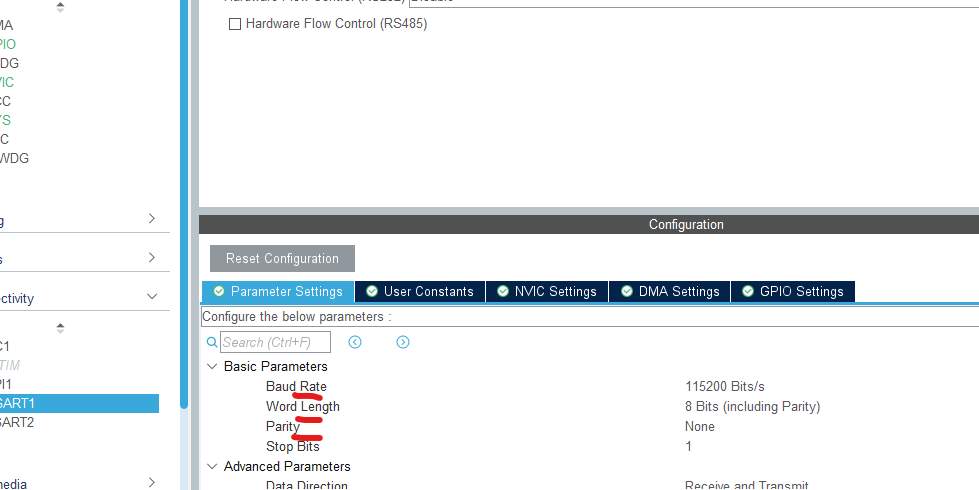
设置异步通信
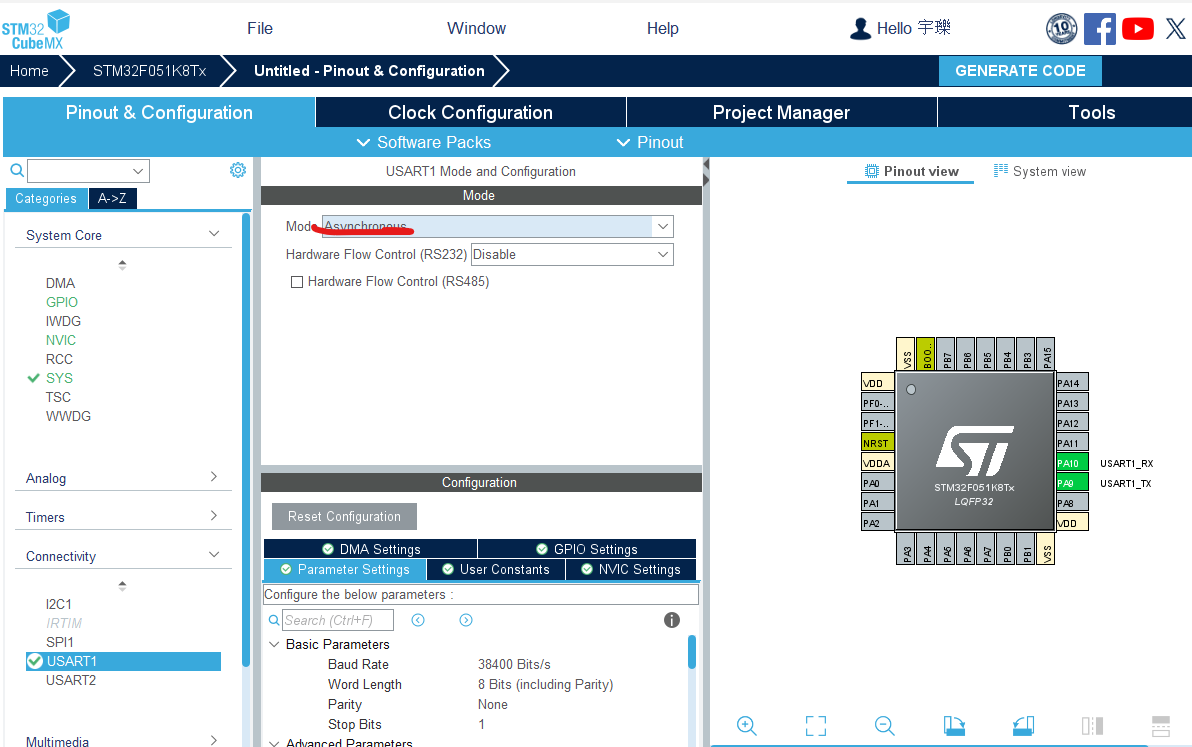
设置数据位,校验位、波特率、停止位
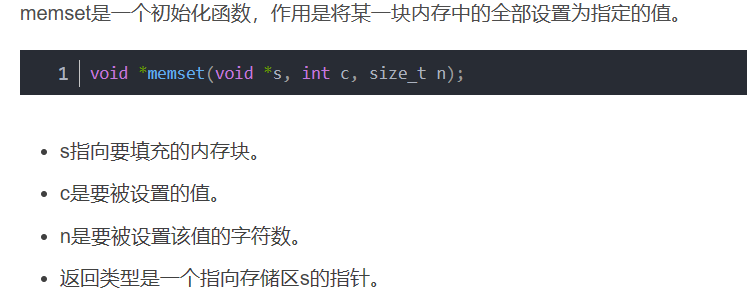
memset
11.USB的四类传输方式

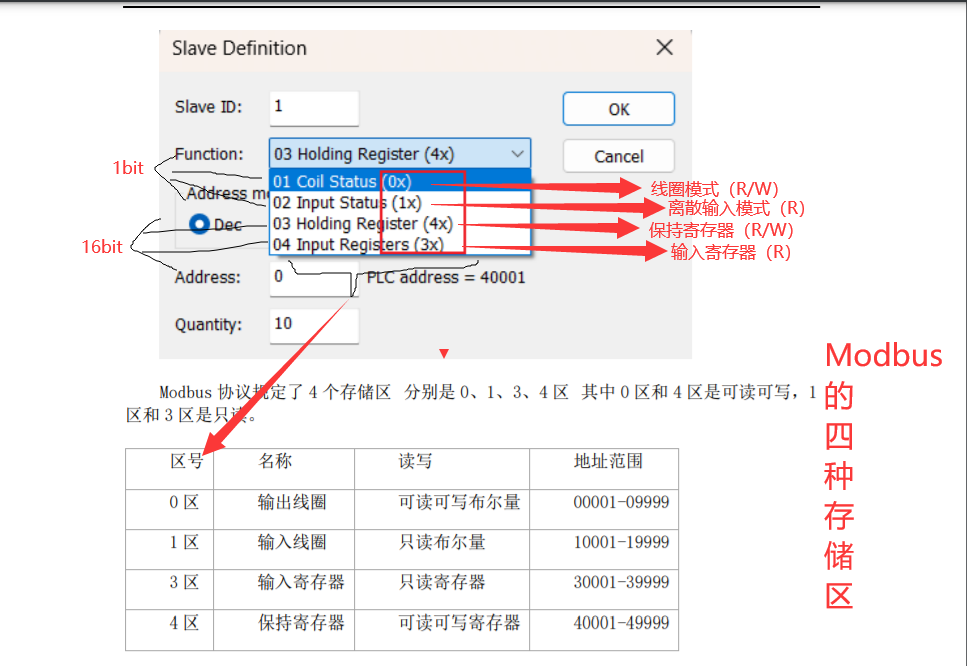
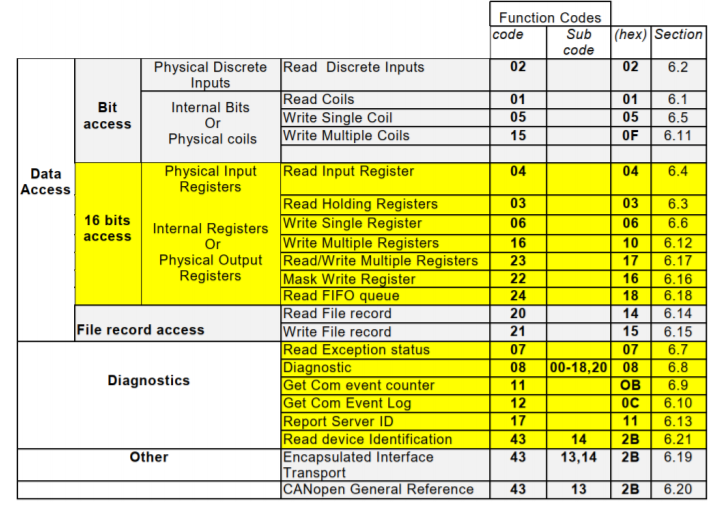
12.Modbus的四种存储区(Modbus是一主多从的通信协议)
Vim代码编辑器编辑代码,再经过gcc代码编译器编译生成可执行文件,再./执行文件
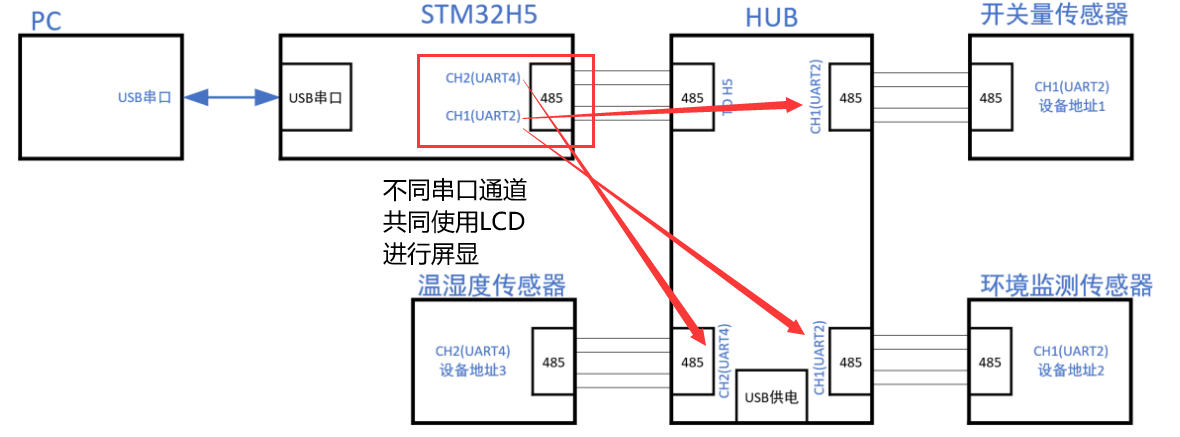
Freertos在不同串口的通道同时使用LCD进行屏显时,需要设置互斥量来建立互斥锁(具体为可以在上一段程序使用LCD时,下一段程序无限等待(portMAX_DELAY)),在上一段程序完成使用后,要释放互斥锁!


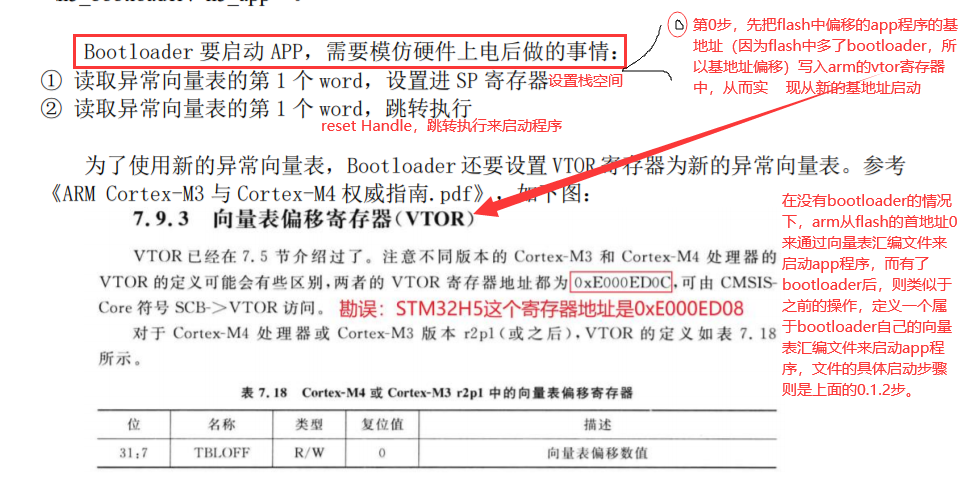
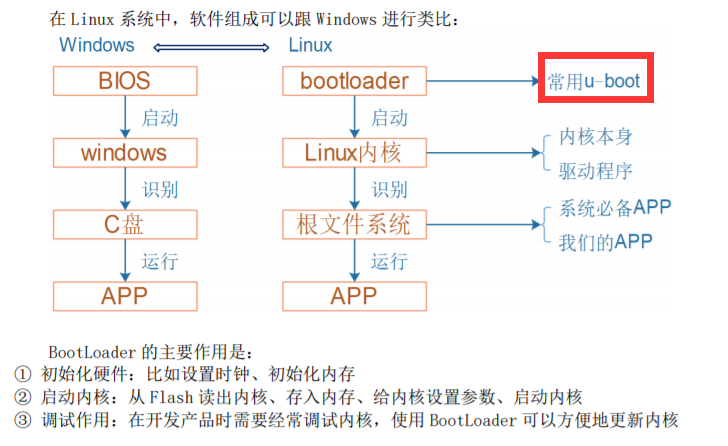
15.u-boot是最常用的bootloader
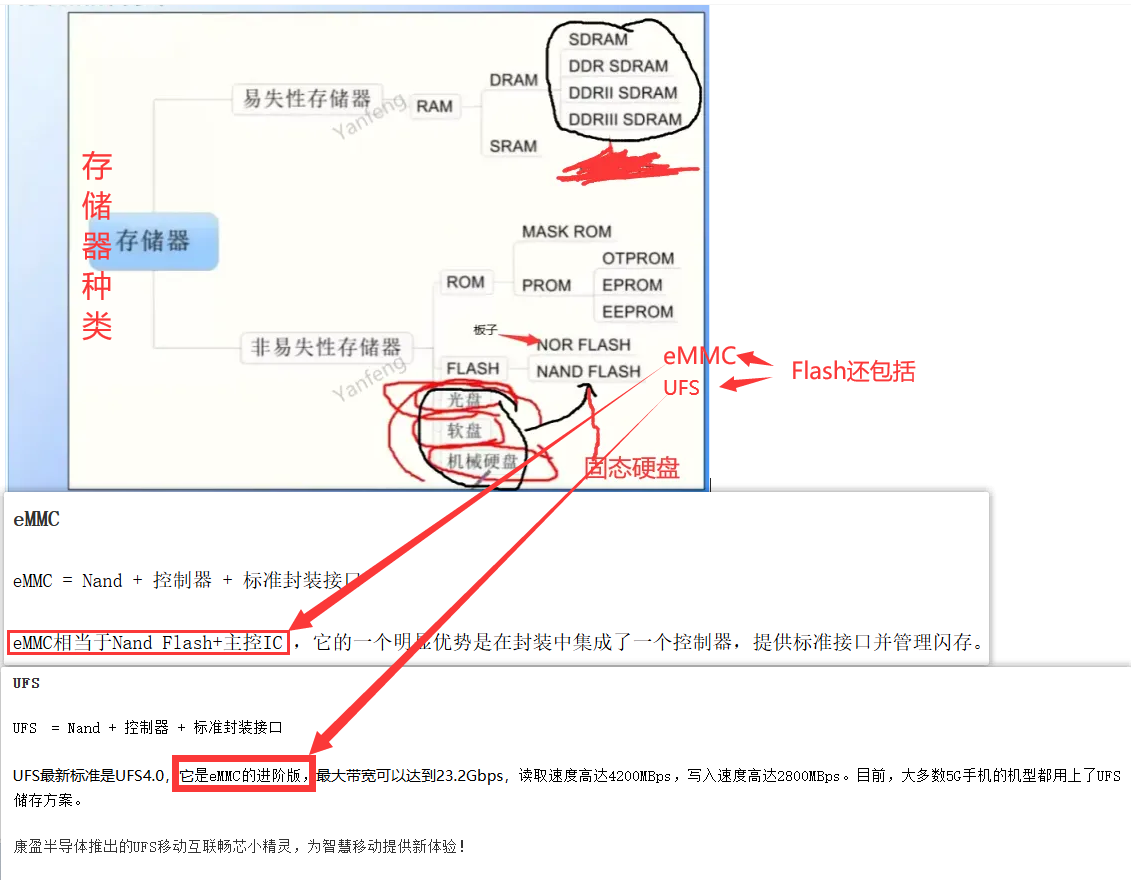
16.eMMC、Nand Flash都属于Flash,Flash的具体类别如下:
在单片机板子的Flash中,已预先包含Bootloader和APP程序(Bootloader存在的意义为帮助APP程序实现更新或重装,原因见下文14)
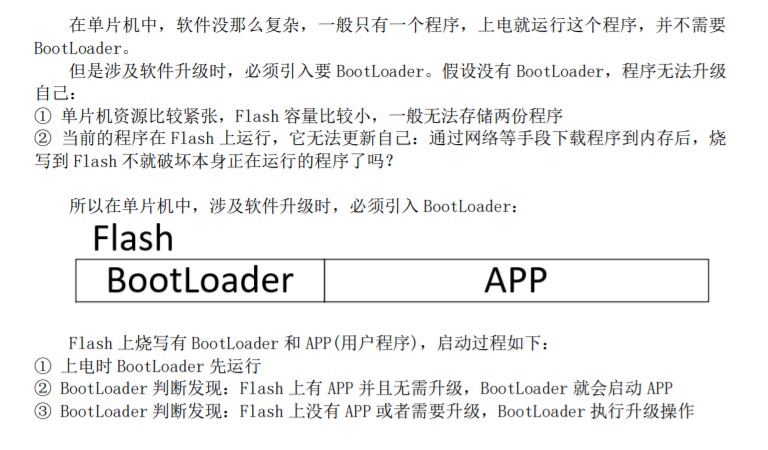
17.Bootloader在APP程序下载更新或重装中存在的意义
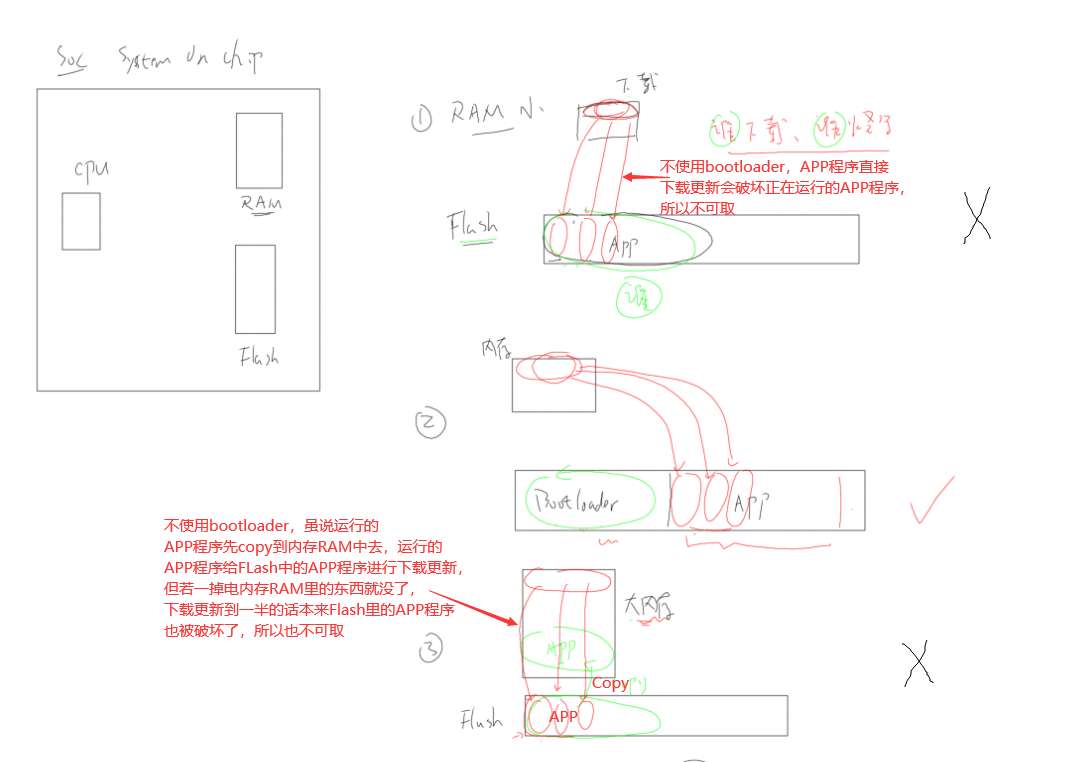
18.bootloader下载更新或重装APP程序的思路框架
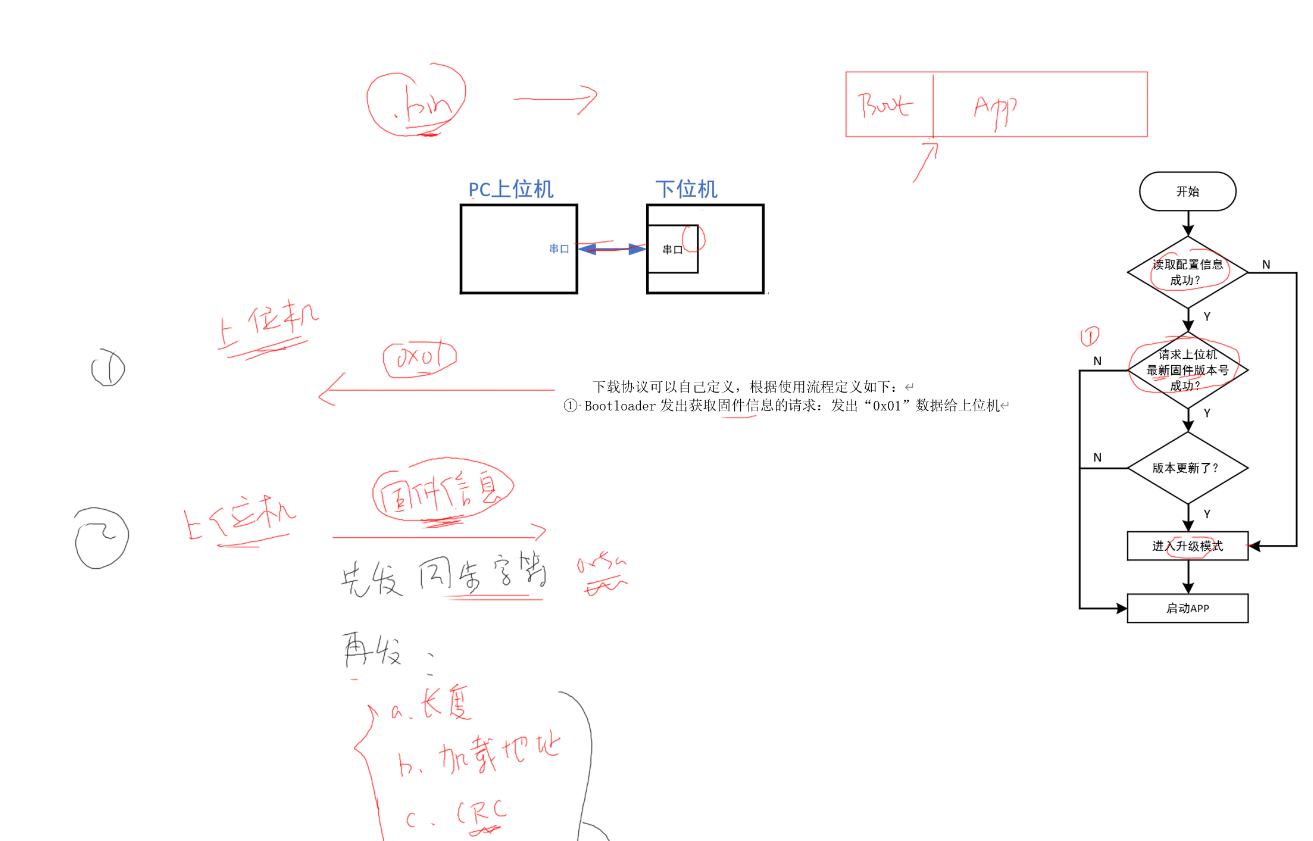
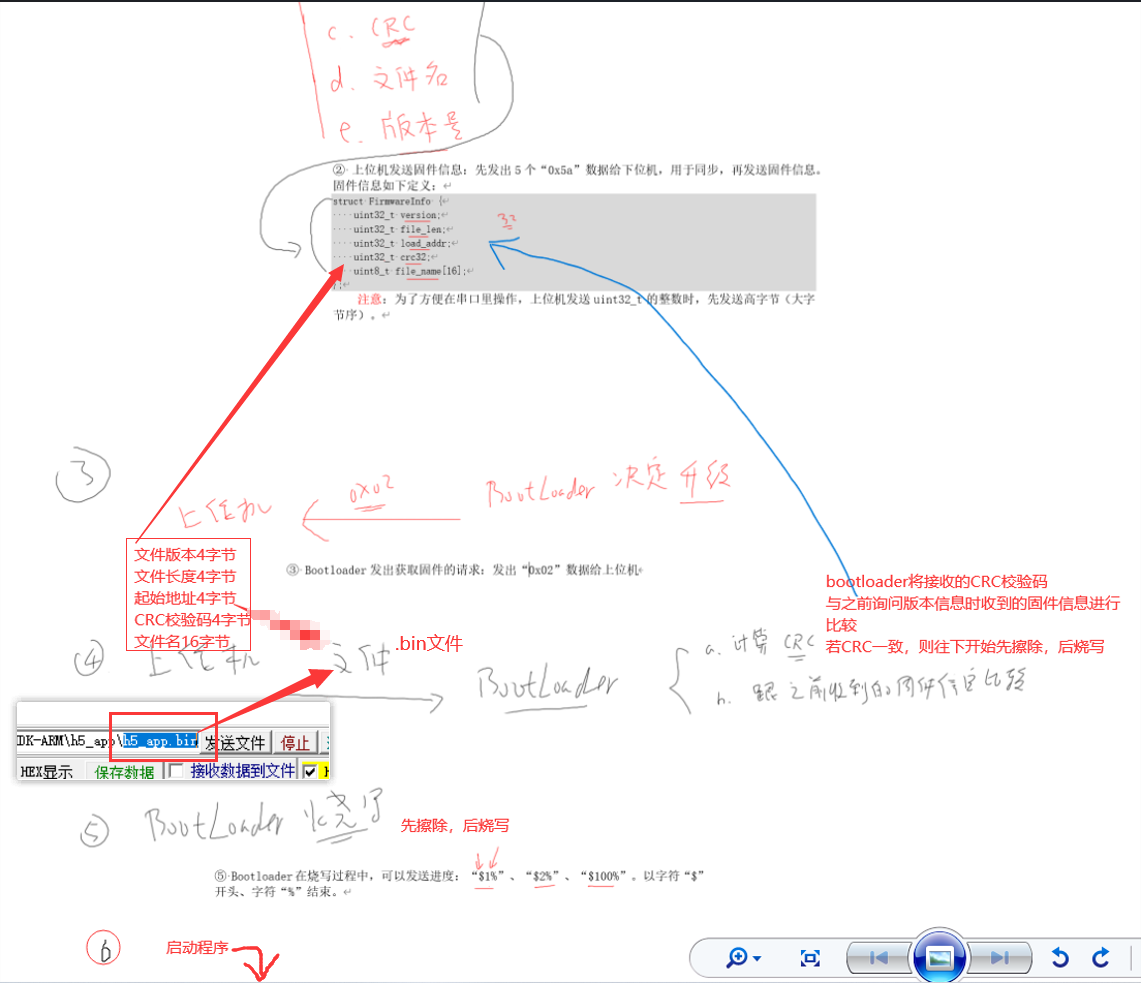
上图6的启动程序的具体方法如下图: