Manus Quantum数据手套能够提供实时端到端的手部动作数据流与高精度数据集,助力人形机器人实现快速发展。
Quantum量子数据手套采用毫米级精度的磁性指尖跟踪传感器,融入尖端的EMF磁性定位追踪技术,无漂移,能提供高度准确且可靠的手指动作捕捉数据,为人形机器人、人工智能和机器学习赋能。
Manus是一家专注于开发高精度创新型人机交互设备的高科技公司,致力于手指跟踪技术的研究与开发,旨在为虚拟现实和动作捕捉领域提供卓越的产品和服务,主要产品包含Quantum量子数据手套、Prime3动捕手套、Quantum Ultimate终极数据手套等系列。

Manus Quantum量子数据手套采用毫米级精度的磁性指尖跟踪传感器,融入尖端的EMF磁性定位追踪技术,无漂移,能提供高度准确且可靠的手指动作捕捉数据,为人形机器人、人工智能和机器学习赋能。
Manus Quantum数据手套在机器人与机器学习领域的价值及实现路径:
Manus在机器人领域,通过提供高度精确的手部运动数据,加速高精度机器人操作技能的培训进程,结合机器学习算法,训练机器人预测和模仿人类动作,自动执行任务,减少人为错误并提高工作效率,已经在全球顶尖人形机器人公司和人工智能实验室得到了广泛的应用。

-
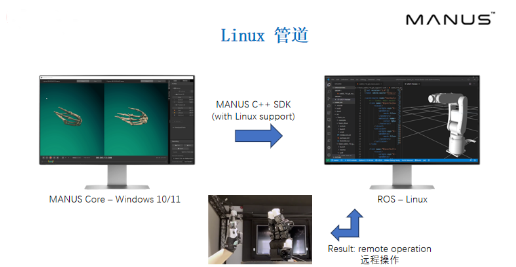
实时端到端数据流和ROS集成:通过Xsens动捕系统(特斯拉确认)、OptiTrack(MIT半确认)和MANUS Core集成至至Linux系统。MANUS Core SDK允许开发者实时访问多种端到端数据,包括关节角度、指尖位置等,进而在ROS下高精度实时遥控灵巧手和人形机器人,也可以通过Unity和Unreal Engine插件直观展示数据。
-
数据记录与导出:利用Core的记录和导出功能,可将捕捉到的动作以FBX或CSV格式输出,通过提供大量真实的手部动作数据,与传感器反馈相结合,用于训练机器学习模型,使机器人能够识别物体形态、学习如何与物体互动,以及理解和执行复杂的手势命令。
Quantum Mocap数据手套具有以下显著特点:
-
高精度动作捕捉和实时端到端数据解决方案:Quantum数据手套采用毫米级的指尖EMF磁性定位追踪技术、无漂移、不受遮挡影响,精确捕捉手部每一个细致入微的动作,并提供了创新的实时端到端准确数据的手部解决方案,满足高精度控制需求,确保数据的高度准确和可靠。
-
可用于机器人灵巧手实时遥操作:可将手部动作实时映射到机器人手部,实现身临其境的远程操控。无论是在医疗、工业还是危险环境中,都能大大拓展机器人的应用范围,让用户体验近乎真实的临场操控感受。
-
数据处理与集成优势:支持C++ Windows和Linux SDK开发自定义集成,可将手指数据导出为CSV文件,简化机器学习和机器人应用中数据处理的流程,为机器人学习与训练提供精准的数据支持。
- Linux兼容性:MANUS™ Linux SDK打破平台壁垒,无缝对接ROS系统,特别针对Ubuntu 22.04和20.04版本优化,为熟悉Linux的开发者提供强大工具链,加速创新手势捕捉方案的开发。
MANUS Ultimate终极数据手套和Prime3动捕数据手套特色和潜在应用市场

-
实时机器人控制:使机器人能够模拟人类手部的精细动作,适用于医疗辅助、危险环境作业、精密制造等领域。
-
机器学习训练:提供大量真实手部动作数据,优化机器学习模型,提升机器人对复杂手势命令的理解和执行能力。
-
虚拟现实与远程操作:在VR/AR应用中实现自然的手部交互,或用于远程操控设备,提高操作的真实感和效率。
