导读
三维点云是完成精密化 PCB 检测 的最新视觉技术。友思特 Saccde Vision 视觉扫描系统,采用先进的三维成像技术和算法输出直观点云图,进一步确保了PCB生产的可靠性与稳定性能。
在电子产品的生产过程中,PCB(Printed Circuit Board,印刷电路板)的装配质量直接影响产品的可靠性和性能稳定性。螺丝作为PCB固定件的重要组成部分,其装配质量的保证尤为关键。传统的视觉检测方法往往依赖于二维图像处理,但面对高密度和复杂结构的PCB,其检测精度和效率面临挑战。
随着视觉成像技术的不断发展,基于三维点云 的视觉检测技术逐渐成为解决方案之一,它能够提供更为全面和准确的信息,特别是在螺丝类型识别、漏装检测和螺丝浮起等方面显示出显著的优势。
PCB螺丝检测的常见需求
1. 螺丝类型识别
不同类型的螺丝在PCB装配中扮演着不同的角色,其形状、尺寸和固定方式各异。传统的二维图像处理可能无法有效区分不同类型的螺丝,而基于三维点云的技术则能够通过精确的形状匹配和空间分布分析,实现对螺丝类型的自动识别。例如,通过比较螺丝的螺纹参数、头部形状以及直径尺寸,系统可以准确判断出所使用的螺丝类型,确保装配的正确性和稳定性。


螺丝类型正确(上)与错误(下)
2. 漏装螺丝检测
漏装螺丝是PCB装配中常见的质量问题之一,可能会导致产品的性能不稳定甚至故障。传统的检测方法通常依赖于视觉系统捕捉的二维图像,但面对高密度和复杂的PCB结构,漏装螺丝的检测难度较大。基于三维点云的技术通过对螺丝孔的深度、形状和尺寸进行精确测量,可以实现对漏装螺丝的高效检测。系统可以通过分析螺丝孔是否完全被螺丝覆盖,并结合预设的固定深度和位置要求,快速判断是否有漏装现象的发生。


未漏装螺丝(上)与漏装螺丝(下)的PCB
3. 螺丝浮起检测
螺丝浮起是指螺丝在装配过程中未能完全固定在PCB上,可能导致接触不良或者信号传输不稳定的问题。传统的视觉检测难以精确判断螺丝与PCB之间的间隙和接触状态,而基于三维点云的技术则可以通过比较螺丝头和PCB表面的距离,检测螺丝是否跟PCB表面紧密贴合。系统可以设定合理的螺丝接触深度范围,并通过实时反馈和图像处理算法,检测螺丝浮起现象并进行报警或者自动调整。

应用案例
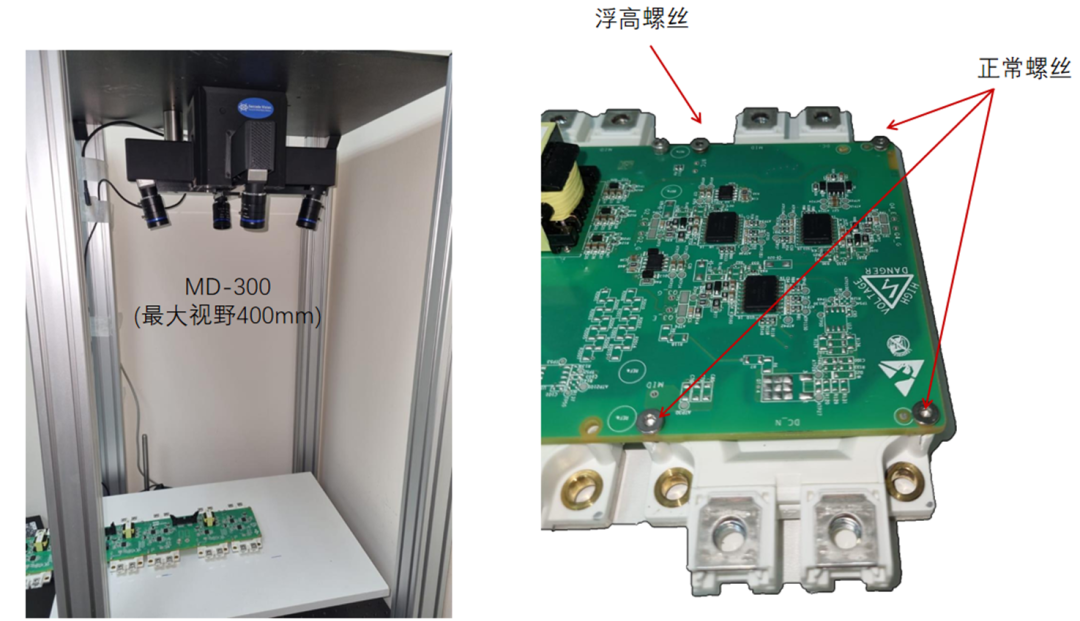
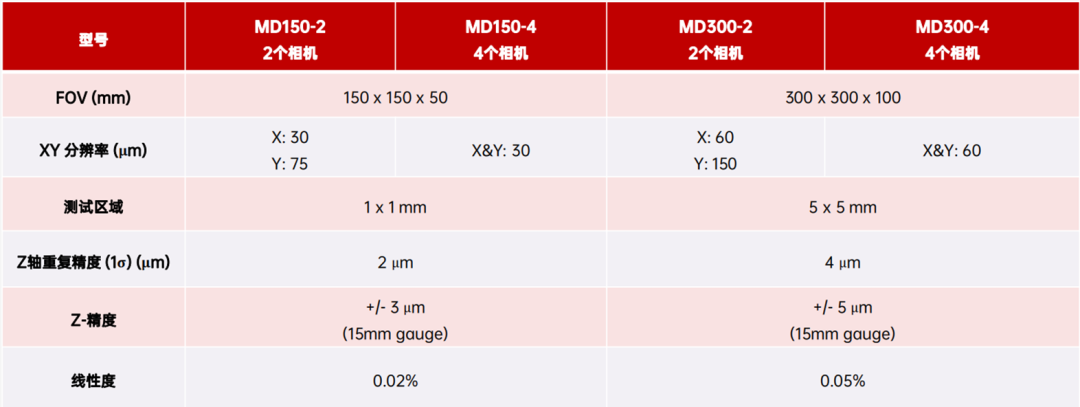
友思特基于三维点云的 PCB 装配螺丝视觉检测方案 ,结合友思特 Saccde Vision 线扫相机系统 设备,检测PCB电路板上是否存在螺丝浮起、螺丝类型错误、螺丝漏装缺陷,检测精度 5um,具体参数规格如下。
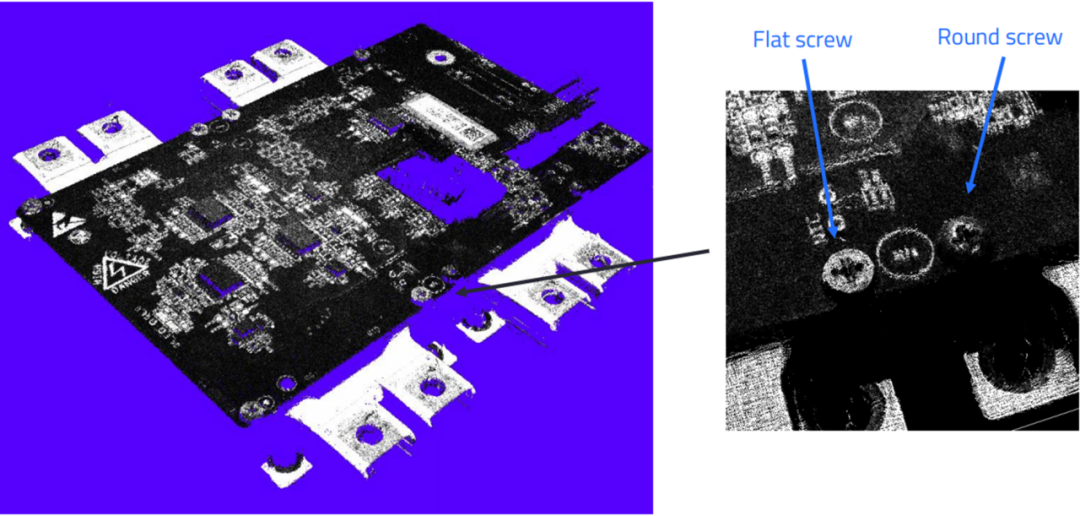
扫描得到的点云:(系统设备与检测样品均固定摆放,扫描过程中无需移动)
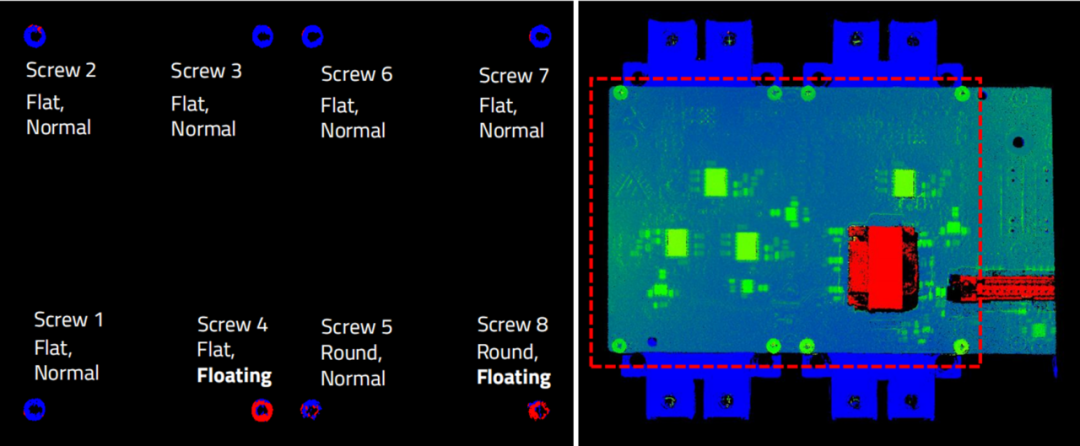
检测结果展示:
基于三维点云的PCB装配视觉检测方案代表了电子制造业向智能化、高效率方向发展的重要进步。通过采用先进的三维成像技术和算法,这些方案能够有效地提高PCB装配过程的质量和效率,为企业带来显著的竞争优势和生产效益。