本文通过机器人工具箱实现SCARA机器人的GUI界面以进行正运动学分析,主要涉及到MATLAB的Robotics Toolbox以及GUI工具箱的使用。以下是一个概括性的步骤和要点说明:
matlab仿真代码(附详细注释):
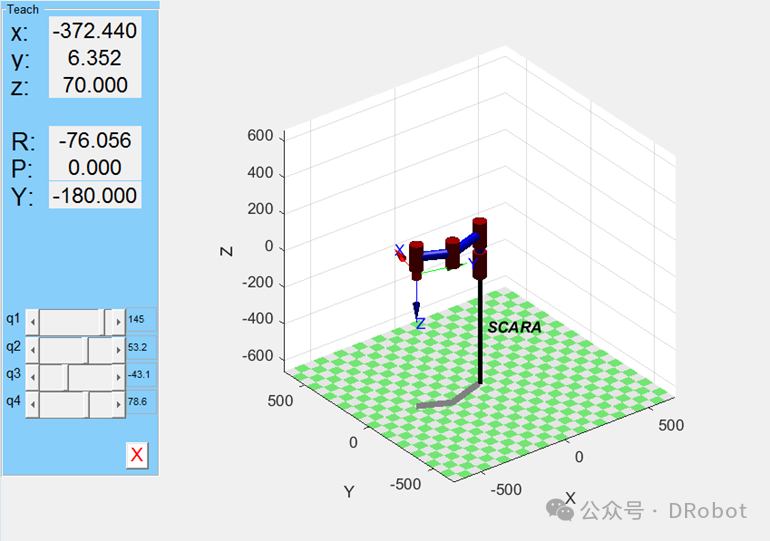
clc% D-H参数:d0=165;a1=225;a2=175;d3=95;a4=0;%DH = [THETA D A ALPHA SIGMA]L1 = Link([0,d0,0,0]);L2 = Link([0,0,a1,0]);%设置第三个关节为平移关节(改变sigma值为1),并设置关节限位0-2(移动范围)L3 = Link([0,0,a2,pi]); %L3.qlim = [0 2];L4 = Link([0,d3,0,0]);scara=SerialLink([L1 L2 L3 L4], 'name', 'SCARA');scara.plot([0 0 0 0]) %显示机器人,初始q1至q4都为0scara.teach %打开各关节的驱动,用于调节各关节变量值仿真结果: