Introduction
经过前面三篇教程帖子(yolov8n在行空板上的运行(中文),yolov10n在行空板上的运行(中文),Mediapipe在行空板上的运行(中文))的介绍,我们对如何使用官方代码在行空板上运行物体检测的AI模型有了基本的概念,并对常见的模型进行了简单的测试和对比。
在行空板上YOLO和Mediapipe图片物体检测的测试(中文)中我们对于行空板上使用YOLO和Mediapipe进行图片物体检测进行了测试。
进一步的,本文将
- 对不同模型的视频物体检查进行详细的对比分析;
- 进行针对在行空板上的视频物体检测进行代码编写和优化;
- 对不同模型的帧率对比测试。
Note: 因为视频物体检测和图片物体检测用的是相同的模型,所以在检测准确性上不会有区别,所以检测结果的准确性可以直接参考以行空板上YOLO和Mediapipe图片物体检测的测试(中文)所做的测试。
yolo视频物体检测
不同onnx模型导出设置的表现对比
设置和代码
导出onnx模型的官方代码为:
Python
from ultralytics import YOLO
# Load a pretrained YOLOv10n model
model = YOLO("yolov10n.pt")
#export onnx
model.export(format='onnx')yolo系列模型在使用官方代码导出onnx格式模型的时候,有几个不同的选项:
| 参数 | 类型 | 默认值 | 描述 |
|---|---|---|---|
| imgsz | int or tuple | 640 | 模型输入所需的图像大小。对于正方形图像可以是整数,对于特定尺寸可以是元组(高度,宽度)。 |
| half | bool | False | 支持FP16(半精度)量化,减少模型尺寸,并可能加快对支持硬件的推理。 |
| dynamic | bool | False | 允许ONNX和TensorRT导出的动态输入大小,增强处理不同图像尺寸的灵活性。 |
| simplify | bool | False | 简化ONNX导出的模型图,潜在地提高性能和兼容性。 |
- 其中,dynamic与imgsz不兼容;dynamic与half不兼容。
我们将分别对这几个选项的不同组合进行对比测试,分辨率都采用640。共包括以下模型:
| 设置 | 代码 |
|---|---|
| 默认 | model.export(format='onnx', imgsz=640) |
| dynamic | model.export(format='onnx', dynamic=True) |
| simplify | model.export(format='onnx', simplify=True, imgsz=640) |
| simplify和dynamic | model.export(format='onnx', simplify=True, dynamic=True) |
| half | model.export(format='onnx', half=True, imgsz=640) |
| simlify和half | model.export(format='onnx', simplify=True, half=True, imgsz=640) |
测试结果
对不同设置的模型进行行空板+USB摄像头的视频物体检测测试,结果如下:
| 模型大小 | simplify | half | dynamic | imgsz | 帧率 | |
|---|---|---|---|---|---|---|
| YOLOv10n | 8.99MB | × | × | × | 640 | 0.3029 |
| YOLOv10n | 8.86MB | × | × | √ | × | 0.3002 |
| YOLOv10n | 8.95MB | √ | × | × | 640 | 0.3009 |
| YOLOv10n | 8.95MB | √ | × | √ | × | 0.3011 |
| YOLOv10n | 8.99MB | × | √ | × | 640 | 0.2999 |
| YOLOv10n | 8.95MB | √ | √ | × | 640 | 0.3017 |
分析
通过测试结果的统计,可以分析得到以下特点:
- dynamic设置可以略微减小模型大小,也会略微降低运行速度;
- simplify也可以略微减小模型大小,但极不显著,也会略微降低运行速度;
- 如果simplify和dynamic同时开启,不如值开启dynamic在模型尺寸上减少的明显;
- half设置并没有速度上的提升,反而有降低,这是因为行空板没有半精度优化的硬件支持。
小结
- 如果能事先知道输入图片的尺寸,就不要使用任何参数设置,只用imgsz设置图片尺寸;
- 如果实现不知道图片输入的尺寸,就使用dynamic=True;
- 不要设置half=True和simplify=True
不同尺寸输入的表现对比
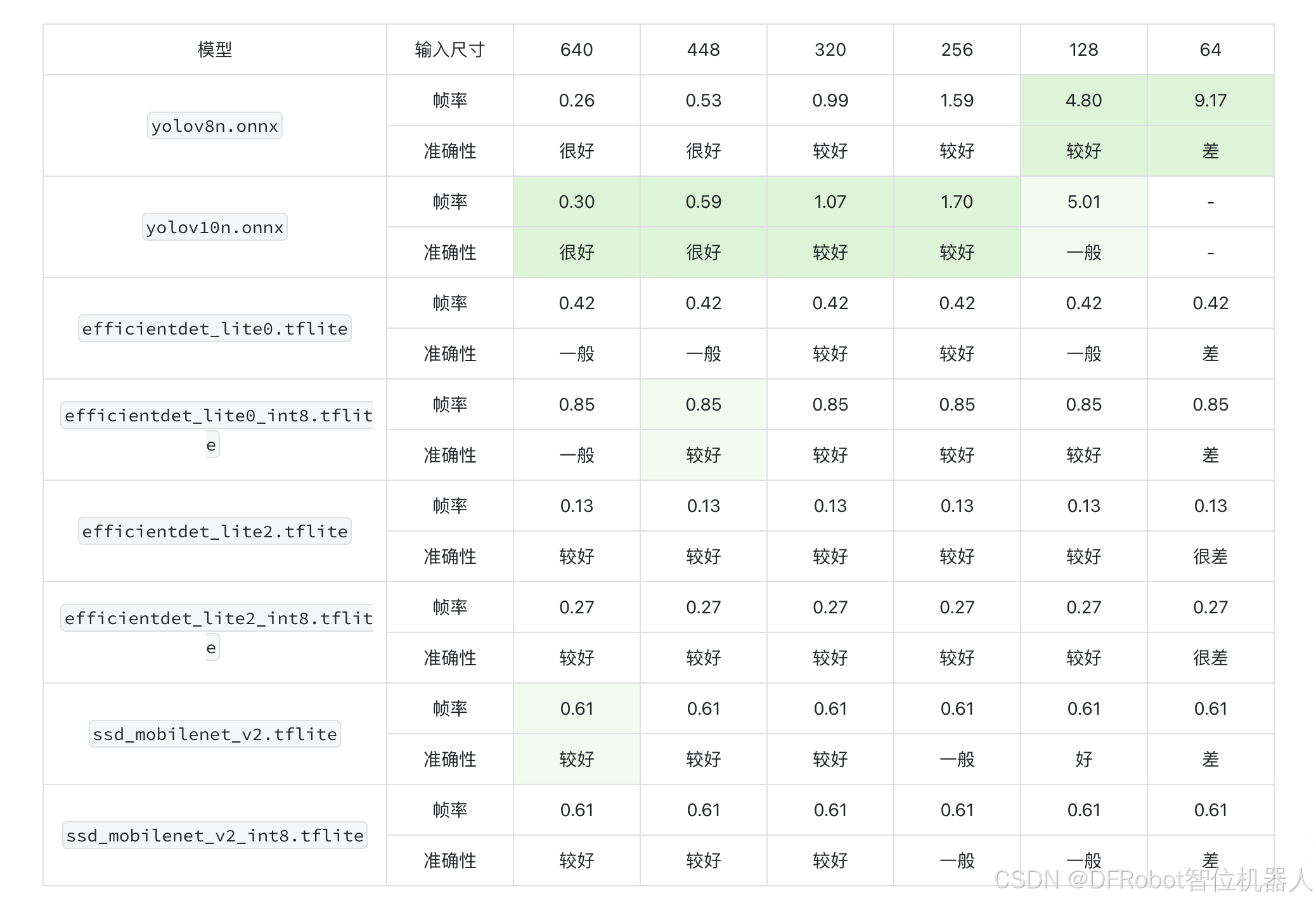
yolo的测试结果
| 模型 | 模型大小 | dynamic | imgsz | 帧率 |
|---|---|---|---|---|
| YOLOv10n | 8.99MB | × | 640 | 0.30 |
| YOLOv10n | 8.91MB | × | 448 | 0.59 |
| YOLOv10n | 8.87MB | × | 320 | 1.07 |
| YOLOv10n | 8.86MB | × | 256 | 1.70 |
| YOLOv10n | 8.84MB | × | 128 | 5.01 |
| YOLOv8n | 12.2MB | × | 640 | 0.26 |
| YOLOv8n | 12.1MB | √ | 448 | 0.53 |
| YOLOv8n | 12.1MB | √ | 320 | 0.99 |
| YOLOv8n | 12.0MB | √ | 256 | 1.59 |
| YOLOv8n | 12.0MB | √ | 128 | 4.80 |
| YOLOv8n | 12.0MB | √ | 64 | 9.17 |
分析
可以看出,随着输入尺寸的减小,帧率显著提高。
yolov10n的帧率比yolov8n略高10%左右,同时模型大小减少25%。
小结
- 对于视频检测,在行空板上以128的分辨率运行勉强可以使用;
- 建议选择yolov10n,相较v8,内存占用和速度方面都有优势。
Mediapipe视频物体检测
设置
针对Mediapipe中的三个模型,我们分别测试了非量化和int8量化下的不同分辨率。
分辨率包括:
640、448、320、256、128
测试结果
| 模型\分辨率 | 640 | 448 | 320 | 256 | 128 | 64 |
|---|---|---|---|---|---|---|
| efficientdet_lite0 | 0.42 | 0.42 | 0.42 | 0.42 | 0.42 | 0.43 |
| efficientdet_lite0_int8 | 0.85 | 0.85 | 0.85 | 0.85 | 0.85 | 0.86 |
| efficientdet_lite2 | 0.13 | 0.13 | 0.13 | 0.13 | 0.13 | 0.13 |
| efficientdet_lite2_int8 | 0.27 | 0.27 | 0.27 | 0.27 | 0.27 | 0.27 |
| ssd_mobilenet_v2 | 0.61 | 0.61 | 0.61 | 0.61 | 0.61 | 0.61 |
| ssd_mobilenet_v2_int8 | 0.61 | 0.61 | 0.61 | 0.61 | 0.61 | 0.62 |
小结
- 与图片的目标检测结果类似,不同的分辨率对这些模型而言没有影响;
- 对于efficientdet_lite0和efficientdet_lite2,int8量化可以显著提速;int8量化对于ssd_mobilenet_v2没有影响
视频物体检测总结
我们在统计测试后发现了以下特点:
- yolo系列随着图片分辨率下调,检测耗时显著减少;而Mediapipe不明显。这说明在小分辨率图片检测中,yolo系列有显著的速度优势;
- det的两个模型进行int8量化之后速度显著提升,几乎不会损失准确性;
- Mediapipe的模型在较大分辨率的时候相比yolo有显著的速度优势,但是准确性略低一点。在应用的时候,需要在准确性和速度上进行权衡。
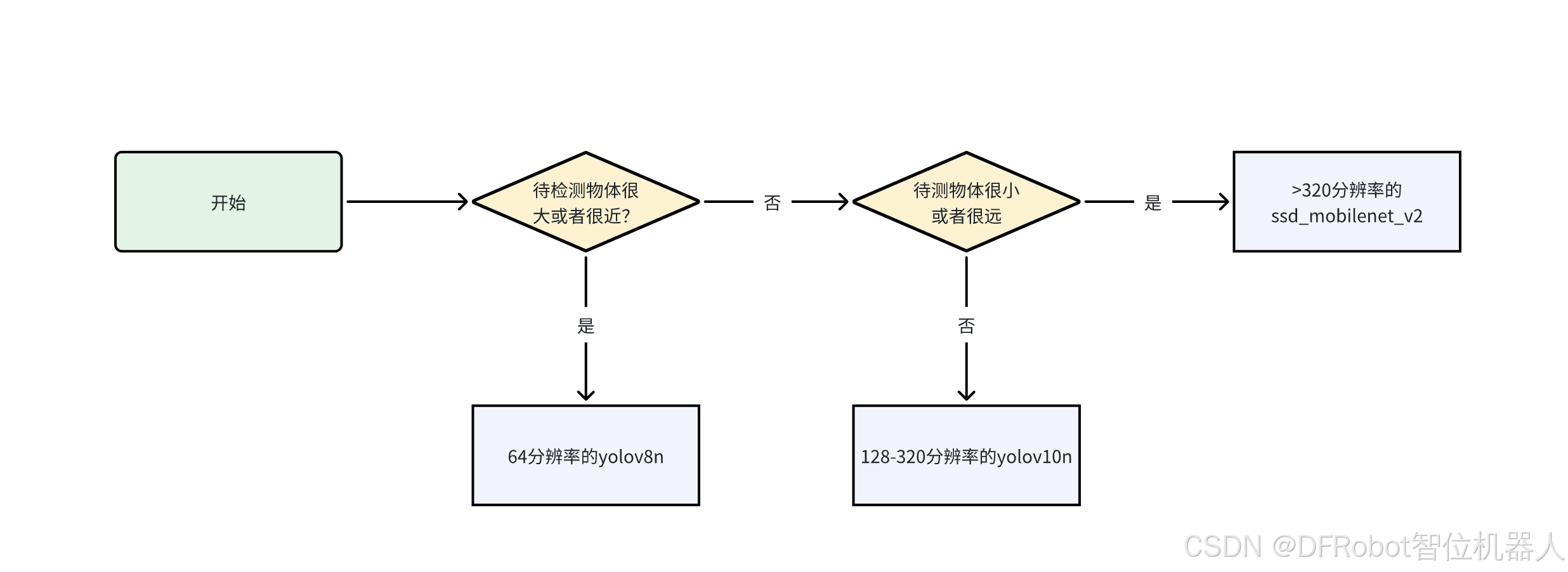
模型选择建议
- 限于视频帧率问题,我们认为最多使用320分辨率,使帧率达到1;
- 如果物体较近或者较大,在低分辨率图片上也可以方便地提取特征,这种情况下推荐使用较低分辨率而速度较快的模型,如64帧率的
yolov8n; - 如果物体较远或者物体较小,则需要分辨率更高才能提取到足够的特征,这种情况下推荐选择
yolov10n。如果需要更高分辨率的图片,而且可以接收帧率较低,可以采用ssd_mobilenet_v2.tflite模型。可以参考下面的流程来选取模型:
附录
使用yolov10n视频检测的代码
行空板+USB摄像头使用yolov10n进行物体检测的代码代码如下:
Python
import cv2
import numpy as np
import onnxruntime as ort
import yaml
import time
def preprocess(frame, input_size):
#这里的resize使用nearest,可以提速大约0.3-0.5帧
image = cv2.resize(frame, input_size,interpolation=cv2.INTER_NEAREST)
# 转换图片到数组
image_data = np.array(image).transpose(2, 0, 1) # 转换成CHW
image_data = image_data.astype(np.float32)
image_data /= 255.0 # 归一化
image_data = np.expand_dims(image_data, axis=0) # 增加batch维度
return image_data
def postprocess(output, image, input_size, show_size, classes):
for detection in output:
x1, y1, x2, y2, conf , class_id = detection
if conf > 0.4:
x1 = int(x1 / input_size[0] * show_size[0])
x2 = int(x2 / input_size[0] * show_size[0])
y1 = int(y1 / input_size[1] * show_size[1])
y2 = int(y2 / input_size[1] * show_size[1])
class_id = int(class_id)
cv2.rectangle(image, (x1, y1), (x2, y2), (255, 0, 0), 2) # 画框
class_name = classes[class_id]
cv2.putText(image, class_name, (x1, y1-10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (255, 255, 255), 2)
return image
def main():
input_size = (128, 128)
with open('ultralytics/cfg/datasets/coco.yaml', 'r', encoding='utf-8') as f:
data = yaml.safe_load(f)
classes = data['names']
window_name = 'FullScreen Image'
cv2.namedWindow(window_name, cv2.WINDOW_NORMAL)
cv2.setWindowProperty(window_name, cv2.WND_PROP_FULLSCREEN, cv2.WINDOW_FULLSCREEN)
# 加载模型
session = ort.InferenceSession('yolov10n.onnx')
input_name = session.get_inputs()[0].name
# 打开摄像头。
cap = cv2.VideoCapture(0)
if not cap.isOpened():
print("Cannot open camera")
exit()
prev_time = 0
while True:
ret, frame = cap.read()
show_size = [320,240]
if not ret:
print("Can't receive frame (stream end?). Exiting ...")
break
current_time = time.time()
# 预处理图像
input_tensor = preprocess(frame, input_size)
# 进行推理
outputs = session.run(None, {input_name: input_tensor})
output = outputs[0][0]
# 后处理
show_image = postprocess(output, frame, input_size, show_size, classes)
fps = 1.0 / (current_time - prev_time)
prev_time = current_time # 更新前一帧的时间
cv2.putText(show_image, f"FPS: {fps:.2f}", (10, 30), cv2.FONT_HERSHEY_SIMPLEX, 1, (255, 255, 255), 2)
# 显示结果
cv2.imshow(window_name, show_image)
if cv2.waitKey(1) == ord('q'):
break
# 释放资源
cap.release()
cv2.destroyAllWindows()
if __name__ == '__main__':
main()使用Mediapipe视频检测的代码
行空板+USB摄像头使用Mediapipe进行物体检测的代码代码如下:
Python
import numpy as np
import mediapipe as mp
from mediapipe.tasks import python
from mediapipe.tasks.python import vision
import cv2
import time
input_size = (640,640)
# STEP 1: Import the necessary modules.
base_options = python.BaseOptions(model_asset_path='efficientdet_lite0.tflite')
options = vision.ObjectDetectorOptions(base_options=base_options,
score_threshold=0.5)
detector = vision.ObjectDetector.create_from_options(options)
# STEP 2: Create an ObjectDetector object.
MARGIN = 10 # pixels
ROW_SIZE = 10 # pixels
FONT_SIZE = 1
FONT_THICKNESS = 1
TEXT_COLOR = (255, 0, 0) # red
def visualize(image, detection_result) -> np.ndarray:
"""Draws bounding boxes on the input image and return it.
Args:
image: The input RGB image.
detection_result: The list of all "Detection" entities to be visualize.
Returns:
Image with bounding boxes.
"""
for detection in detection_result.detections:
# Draw bounding_box
bbox = detection.bounding_box
start_point = bbox.origin_x, bbox.origin_y
end_point = bbox.origin_x + bbox.width, bbox.origin_y + bbox.height
cv2.rectangle(image, start_point, end_point, TEXT_COLOR, 3)
# Draw label and score
category = detection.categories[0]
category_name = category.category_name
probability = round(category.score, 2)
result_text = category_name + ' (' + str(probability) + ')'
text_location = (MARGIN + bbox.origin_x,
MARGIN + ROW_SIZE + bbox.origin_y)
cv2.putText(image, result_text, text_location, cv2.FONT_HERSHEY_PLAIN,
FONT_SIZE, TEXT_COLOR, FONT_THICKNESS)
return image
# STEP 3: Initialize the video capture from the webcam.
cap = cv2.VideoCapture(0)
prev_time = 0
while cap.isOpened():
ret, frame = cap.read()
if not ret:
break
frame = cv2.resize(frame, input_size, interpolation=cv2.INTER_NEAREST)
# Convert the frame to the format required by MediaPipe.
image = mp.Image(image_format=mp.ImageFormat.SRGB, data=frame)
# STEP 4: Detect objects in the frame.
detection_result = detector.detect(image)
# STEP 5: Process the detection result. In this case, visualize it.
annotated_frame = visualize(frame, detection_result)
# Calculate and display the frame rate
current_time = time.time()
fps = 1 / (current_time - prev_time)
prev_time = current_time
fps_text = f'FPS: {fps:.2f}'
print(fps_text)
cv2.putText(annotated_frame, fps_text, (10, 30), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2)
cv2.imshow('Object Detection', annotated_frame)
# Break the loop if the user presses 'q'.
if cv2.waitKey(1) & 0xFF == ord('q'):
break
# Release the resources.
cap.release()
cv2.destroyAllWindows()