【导读】
本文提出 DarkNet-YOLO 工业级实践框架,通过引入 残差优化结构 与 多尺度特征融合技术,在保持实时检测精度同时显著提升复杂场景适应性。
目录
三、实战演练:用YOLO(DarkNet)为自动驾驶"开眼"
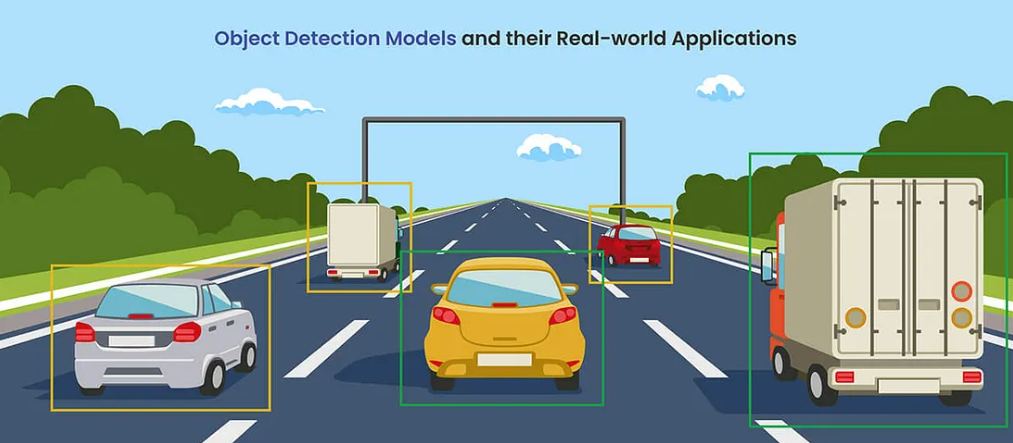
想象一下,让计算机不仅能认出你桌上的咖啡杯,还能精准地指出它所在的位置------这正是目标检测(Object Detection)的魅力所在。作为计算机视觉的核心任务,目标检测的飞速发展,尤其是近十年的突破,几乎完全归功于机器学习,特别是卷积神经网络(CNN)的革命。而在众多突破性成果中,DarkNet这个开源高性能框架功不可没,它正是大名鼎鼎的YOLO(You Only Look Once)系列目标检测器背后的强大引擎。今天,我们就来深入剖析DarkNet与YOLO的理论基础、实战技巧,并一窥它们在现实世界(如自动驾驶)中的惊艳表现。
一、目标检测的进化之路:从"两步走"到"一眼定乾坤"
目标检测的核心挑战在于精准定位(Localization)。早期的深度学习方法,如R-CNN家族,采用"先找候选区域,再分类"的两步策略,虽准但慢。
真正的变革来自单阶段(One-Stage)检测器,以YOLO为代表。它将检测视为一个统一的任务:只需"看一眼"图像,就能同时预测出图像中所有物体的位置和类别。这种设计理念牺牲了少许精度,却换来了惊人的速度 ,为自动驾驶、实时监控等应用打开了大门。而YOLO速度的秘诀,很大程度上源于其精心设计的骨干网络------DarkNet。
YOLO的核心思想:
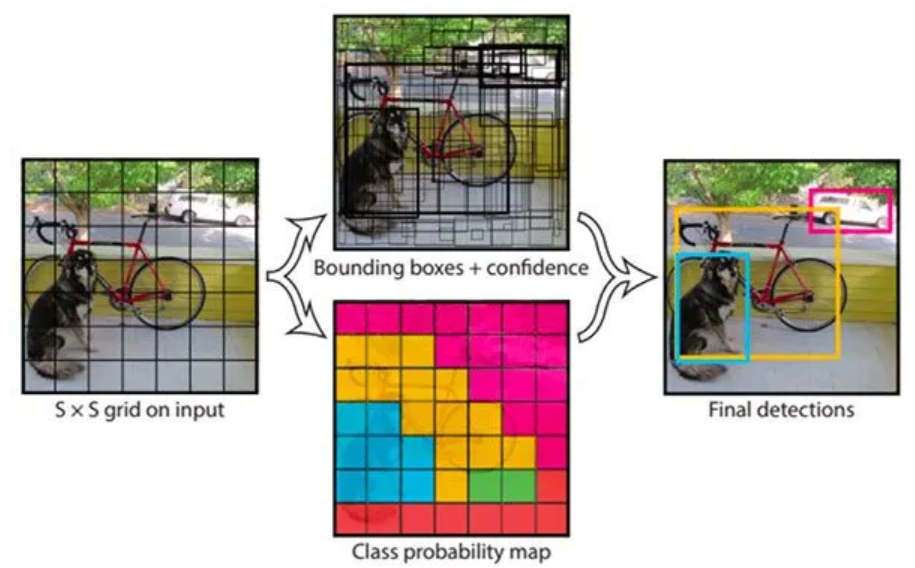
YOLO将输入图像划分为网格(Grid)。每个网格单元负责预测:
-
**边界框(Bounding Boxes):**预测多个可能包含物体的框。
-
**置信度(Confidence Scores):**表示框内包含物体且预测准确的程度。
-
**类别概率(Class Probabilities):**预测框内物体属于各个类别的可能性。
通过一次性处理整个图像并理解其上下文,YOLO大幅减少了误检,并利用非极大值抑制(Non-Maximum Suppression, NMS) 等技术精炼最终检测结果,实现了速度与精度的卓越平衡。
二、DarkNet:YOLO背后的"钢筋铁骨"
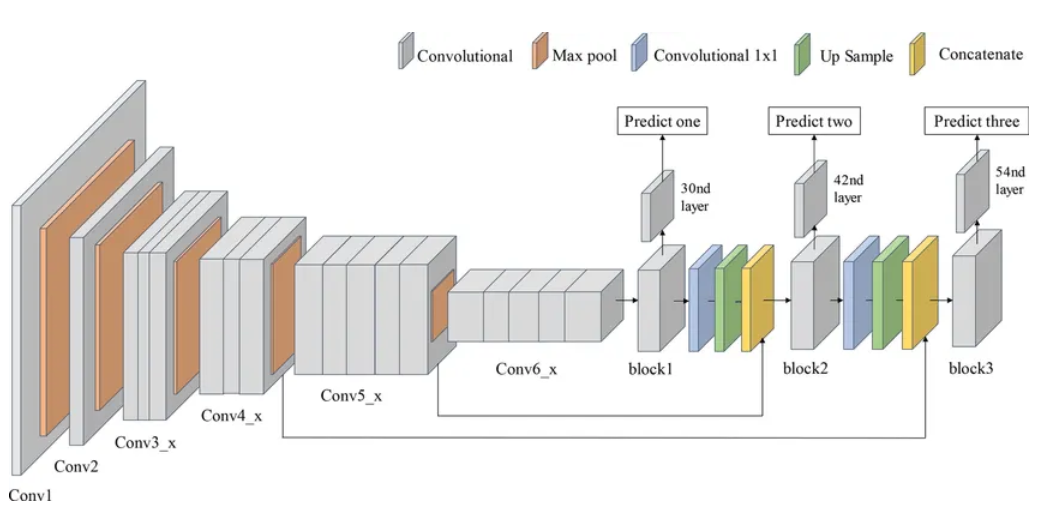
DarkNet并非一成不变。从轻量级的DarkNet-19,到助力YOLOv3登上巅峰的DarkNet-53,它不断进化。
-
深度与效率: DarkNet-53拥有53个卷积层,深度甚至超过著名的ResNet。它擅长从图像中提取多尺度特征------既能识别汽车的轮廓,也能捕捉车窗上的微小反光。
-
核心优势-残差连接 (Shortcut/Residual Connections) **:**这是DarkNet高效训练的关键。它让信息在网络层间更顺畅地流动,有效缓解了深层网络普遍面临的梯度消失(Vanishing Gradients)问题,使模型更稳定。
-
**持续进化:**研究者们不断吸收如DenseNet等架构的优点,通过增强层间连接和特征复用,使模型对小目标、遮挡物体的检测更加鲁棒(Robust),更能适应复杂多变的真实环境。
简单理解DarkNet:
图像依次通过层层卷积网络:
-
**浅层:**识别基础模式(边缘、颜色)。
-
**深层:**理解复杂特征(形状、纹理)。
-
**残差连接:**如同"信息高速公路",确保关键信号不丢失,让整个系统高效地完成目标定位与识别。不必纠结于每个细节框,它们共同构成了一个强大、快速、准确的检测引擎。
三、实战演练:用YOLO(DarkNet)为自动驾驶"开眼"
理论需要实践检验。在笔者进行的自动驾驶目标检测项目中,核心就是运用了基于DarkNet的YOLO模型。以下是关键代码环节的思路解析(非完整代码):
-
模型加载:
import tensorflow as tf
darknet = tf.keras.models.load_model(model_path, compile=False) # 加载预训练DarkNet模型
作用:加载预训练好的DarkNet模型(TensorFlow Keras格式),准备用于推理(检测)。
-
视频目标检测函数 (detect_video):
import cv2
from PIL import Image
import numpy as np
from your_detection_module import detect_image # 假设这是你实现单帧检测的函数
def detect_video(video_path, output_path, obj_thresh=0.4, nms_thresh=0.45, darknet=darknet, net_h=416, net_w=416, anchors=anchors, labels=labels):
"""
处理视频文件,对每一帧进行目标检测并保存结果视频。
参数:
video_path: 输入视频文件路径
output_path: 输出视频文件路径
obj_thresh: 目标置信度阈值
nms_thresh: 非极大值抑制阈值
darknet: 加载的DarkNet模型
net_h, net_w: 模型输入高度和宽度
anchors: YOLO锚框
labels: 类别标签列表
"""
# 打开输入视频
vid = cv2.VideoCapture(video_path)
if not vid.isOpened():
raise IOError("Couldn't open webcam or video")
# 获取视频属性并创建VideoWriter
video_FourCC = int(vid.get(cv2.CAP_PROP_FOURCC))
video_FourCC = cv2.VideoWriter_fourcc(*'mp4v') # 使用MP4V编码
video_fps = vid.get(cv2.CAP_PROP_FPS)
video_size = (int(vid.get(cv2.CAP_PROP_FRAME_WIDTH)),
int(vid.get(cv2.CAP_PROP_FRAME_HEIGHT)))
out = cv2.VideoWriter(output_path, video_FourCC, video_fps, video_size)
# 处理每一帧
num_frame = 0
while vid.isOpened():
ret, frame = vid.read()
num_frame += 1
print("=== 正在处理第 {} 帧 ===".format(num_frame))
if ret:
# 将OpenCV BGR帧转换为RGB (PIL/模型通常使用RGB)
frame_rgb = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)
pil_image = Image.fromarray(frame_rgb)
# 核心检测步骤:调用单帧检测函数 (这里假设detect_image返回带标注的PIL图像)
# 在实际项目中,模型的推理逻辑封装在detect_image或类似函数里。
# 如果使用Coovally平台,其推理SDK或API调用可以方便地集成在此处进行预测。
detected_image = detect_image(pil_image, darknet, net_h, net_w, anchors, labels, obj_thresh, nms_thresh)
# 将检测结果(PIL Image)转换回OpenCV BGR格式用于写入视频
detected_frame_cv = cv2.cvtColor(np.array(detected_image), cv2.COLOR_RGB2BGR)
# 写入处理后的帧到输出视频
out.write(detected_frame_cv)
else:
break # 视频结束
# 释放资源
vid.release()
out.release()
print("目标检测视频已保存至: ", output_path)
作用: 处理整个视频流。核心在于对每一帧图像实时运行YOLO目标检测算法,并将检测结果(框出的物体)合成到新视频中。
-
运行检测:
video_path = '/path/to/input_video.mp4'
output_path = '/path/to/output_video_detected.mp4'
detect_video(video_path, output_path) # 执行视频检测
作用: 指定输入视频路径和输出视频路径,调用detect_video函数,生成包含目标检测结果的视频。
项目成果展示:
处理前帧示例:

处理后帧示例:
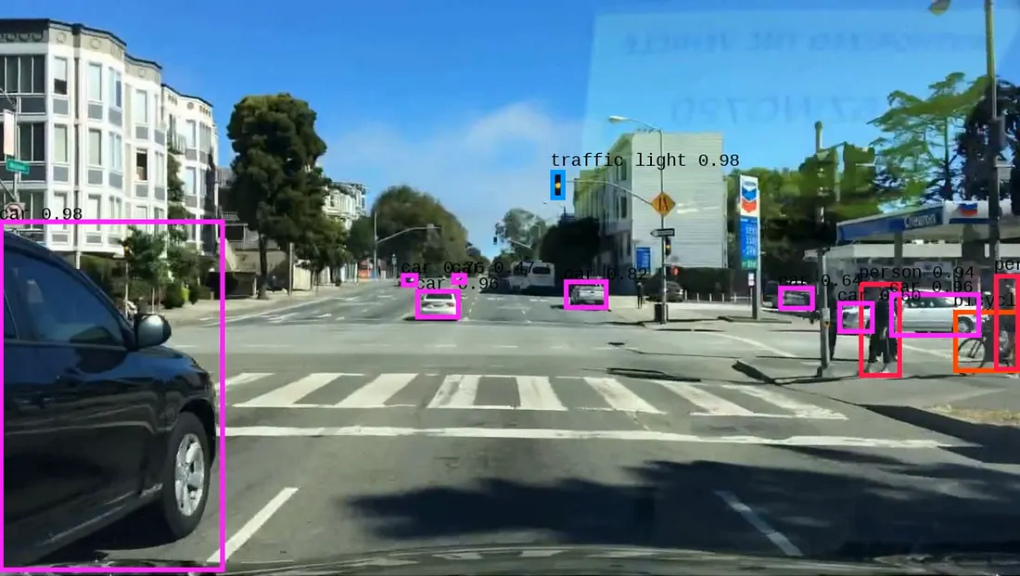
系统能力:
模型能够持续检测并追踪道路上的关键目标(车辆、行人、车道线等)。通过逐帧分析并结合边界框传播技术,系统能稳定、精确地识别移动中的车辆,清晰展示自动驾驶汽车如何感知并理解其周围动态环境。
四、挑战与前沿
尽管基于CNN和DarkNet的检测器已非常强大,挑战依然严峻:
-
**恶劣环境:**低光照、极端天气下的检测。
-
**密集与遮挡:**区分紧密相邻、部分或完全遮挡的物体。
-
**复杂背景:**背景干扰物多。
前沿技术正在破局:
-
**无锚框(Anchor-Free)检测:**简化设计,提升灵活性。
-
**多任务学习(Multi-Task Learning):**同时优化检测及相关任务(如语义分割)。
-
**领域自适应(Domain Adaptation):**提升模型在不同场景(如不同城市道路、不同摄像头)下的泛化能力。
高级训练技巧:
-
Mosaic 数据增强: 将多张图像拼接训练,模拟复杂场景,提升鲁棒性。
-
改进的损失函数(如 CIoU Loss): 更精准地优化边界框的位置和大小。
-
这些进步在Pascal VOC、COCO、KITTI等权威基准数据集上不断刷新着性能记录。
五、从实验室到改变世界:无处不在的目标检测
DarkNet与YOLO引领的目标检测技术已深刻融入我们的生活:
-
自动驾驶: 实时感知车辆、行人、交通标志(如特斯拉Autopilot核心组件)。
-
智能安防: 监控视频中异常行为/物体识别。
-
工业检测: 自动化产品缺陷检测。
-
智慧农业/生态: 无人机/卫星图像中的农作物监测、野生动物追踪。
-
零售分析: 顾客行为分析、商品识别。
案例聚焦
特斯拉Autopilot是DarkNet/YOLO类技术落地的典范:
-
环绕摄像头阵列: 提供多视角、高分辨率的实时视觉数据流。
-
强大的神经网络: 基于类似YOLO的架构,单次前向传播即可同时识别车辆、行人、标志、车道线等多种目标。
-
速度与精度平衡: 满足自动驾驶对低延迟和高可靠性的严苛要求。
-
传感器融合 + AI决策: 结合其他传感器数据,构建环境感知模型,实现安全导航和实时决策。
结语:目光所及,未来已来
以DarkNet为基石、以YOLO为代表的目标检测技术,结合先进的神经网络设计和训练方法,完美诠释了理论与工程实践结合如何驱动科技进步。架构间的持续探索与实验,预示着未来的系统将在性能和优雅性上超越今天。
探索DarkNet、CNN和机器学习驱动的目标检测世界,仅仅是触及了人工智能与计算机科学广袤天地的冰山一角。每一次深入学习都让人既感谦卑又兴奋不已------学得越多,越能感受到创新、创造以及改变人机交互方式的无限可能。这种理论、实践与持续发现的精妙融合,正是驱使我们深入探索这些重塑未来技术的源动力。
正如计算机科学先驱艾伦·图灵所言:
"我们目光所及有限,然应做之事无穷。" ("We can only see a short distance ahead, but we can see plenty there that needs to be done.")
让我们怀抱好奇心与承诺,拥抱前方的挑战。因为每一次前进,都在为机器理解并增强人类体验的征程上,开辟着新的机遇。
这,只是我们迈向科技未来之旅的起点。在这里,创新与影响力交汇,每一项发现都让我们通过人工智能的力量,离改变世界更近一步。