c语言复习

查询Ubuntu版本(18.04)和内核(5.4)
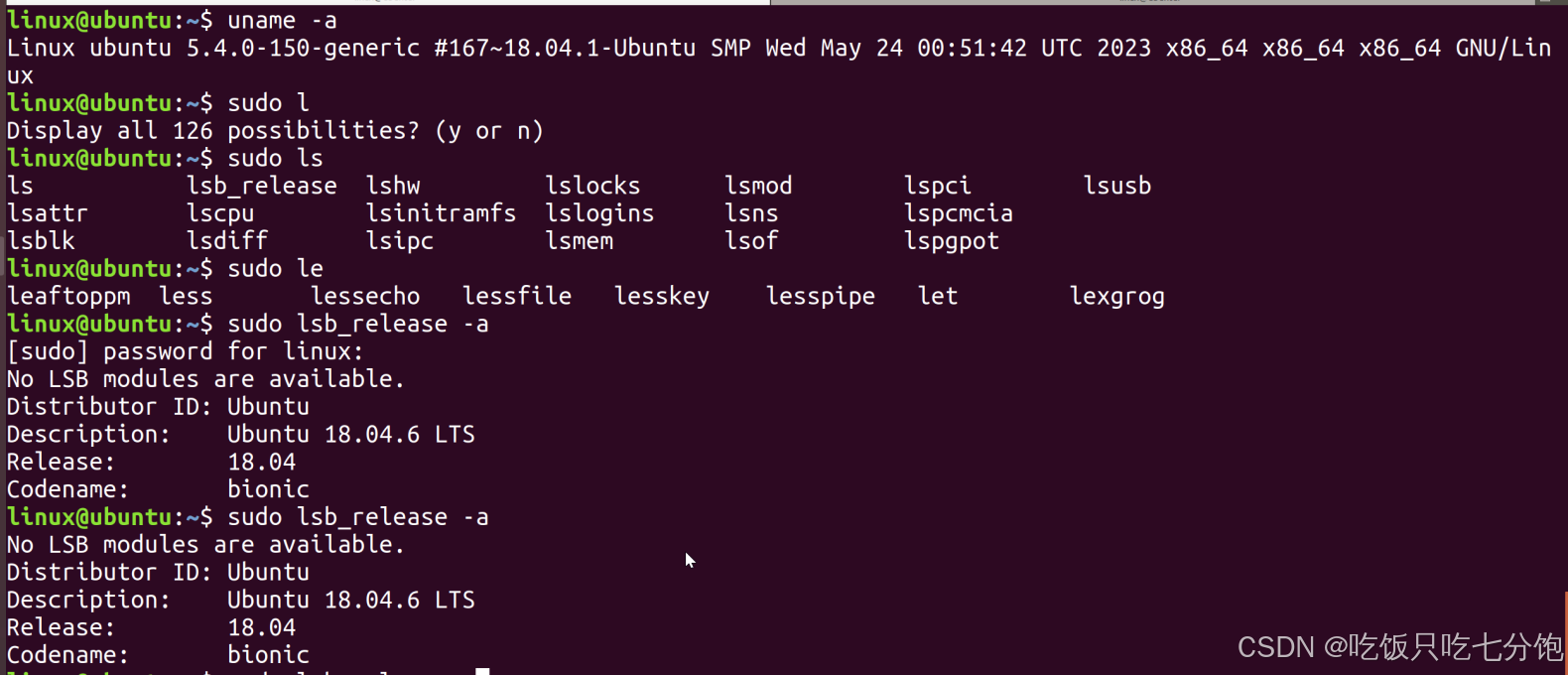
查询使用软件的版本号
arm开发板通信- 直播视频-- 项目第二天下午 2024-09-20
linux和windows下操作开发板前提是开发板中已经导入系统
以下是具体操作
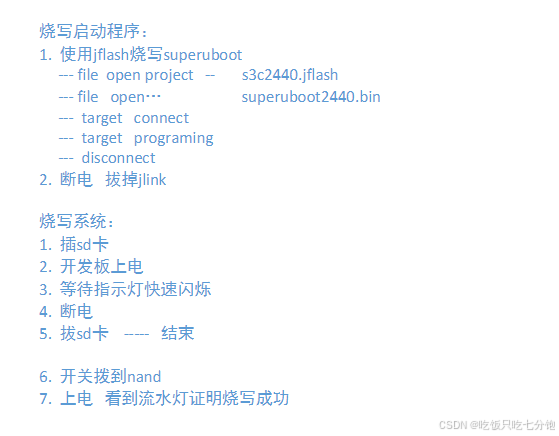
linux下开发板的操作
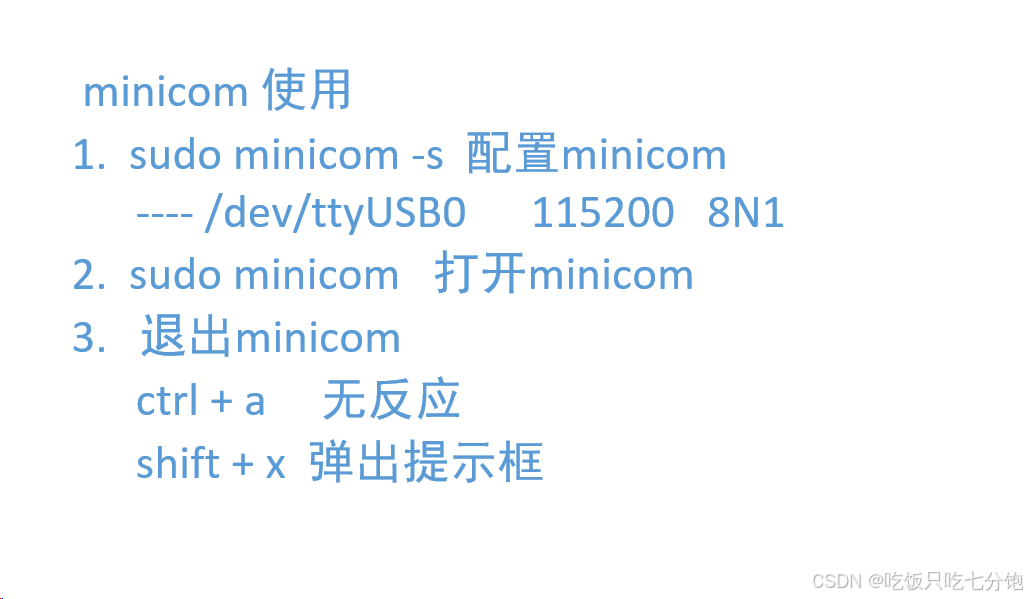
linux下的串口调试助手 minicom

没有就下载安装
有第二个红框(USB0)说明线链接进入Ubuntu
sudo minicom -s s设置minicom参数
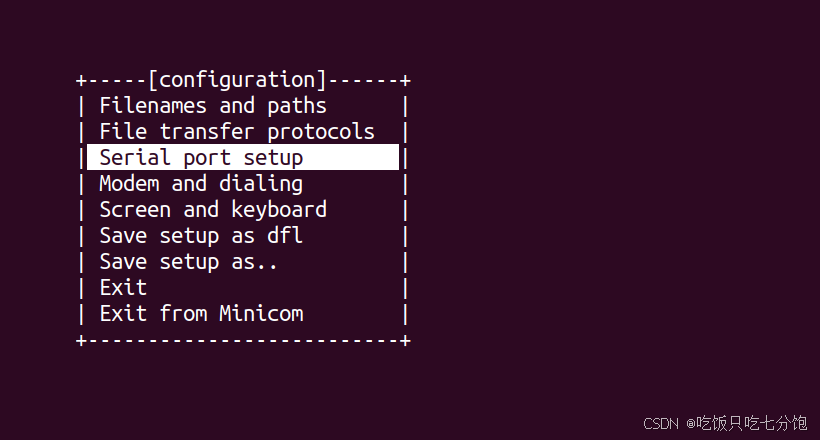
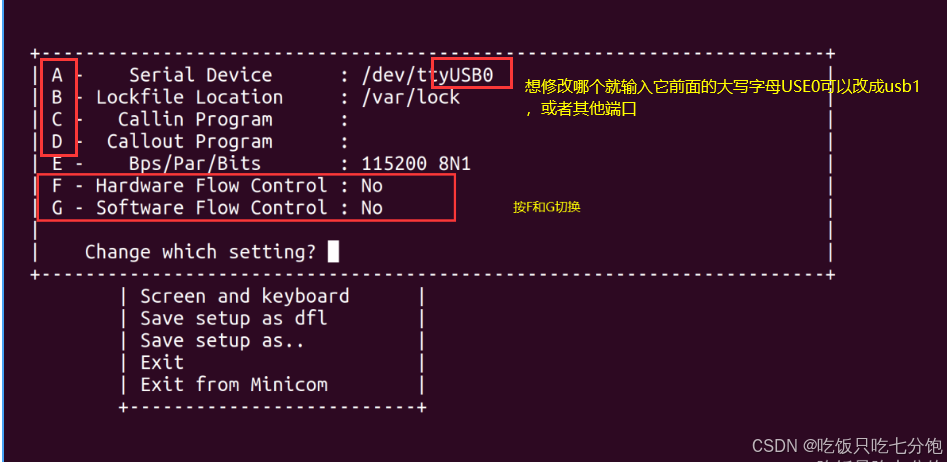
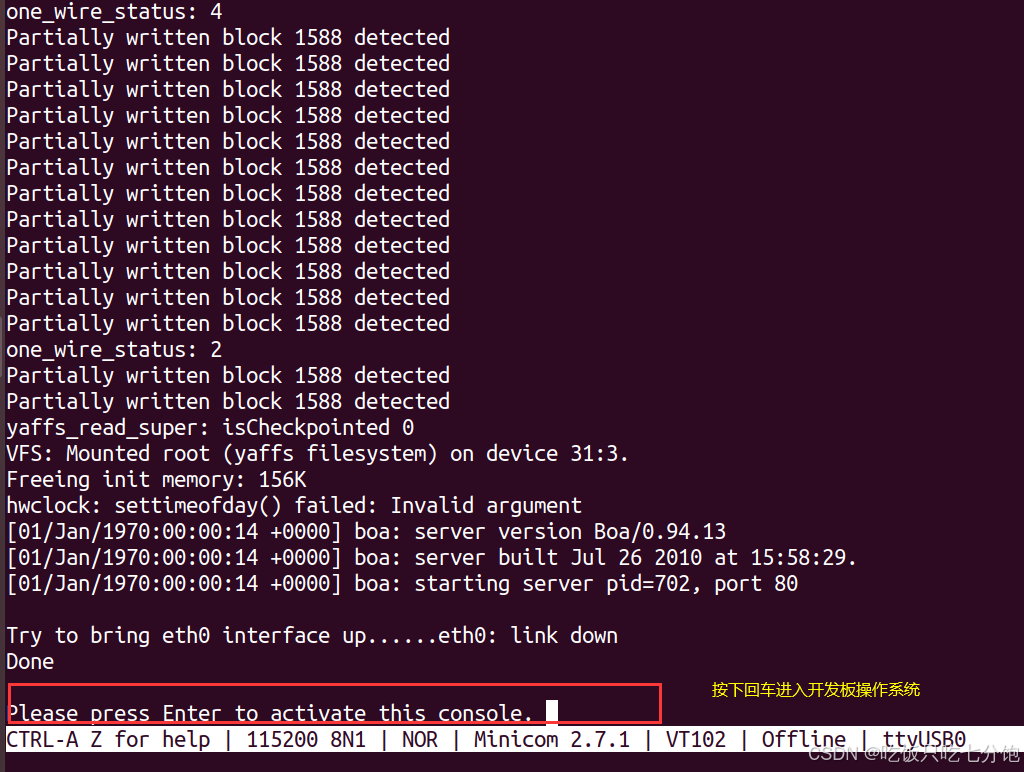
选择这个选项保存 然后选择Exit 退出 ,后给开发板上电。

按下回车
关闭minicom
先ctrl+a 然后 shife+x
在windows下面进行开发板操作
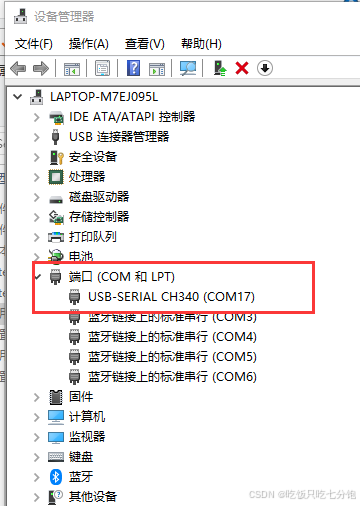
插入串口通信线后,设备管理器查看ch340对应的端口
启动windows下串口调试软件

开发板上电后 按回车即可操作了
arm开发板和linux网络通信
1.网络适配器--->桥接模式
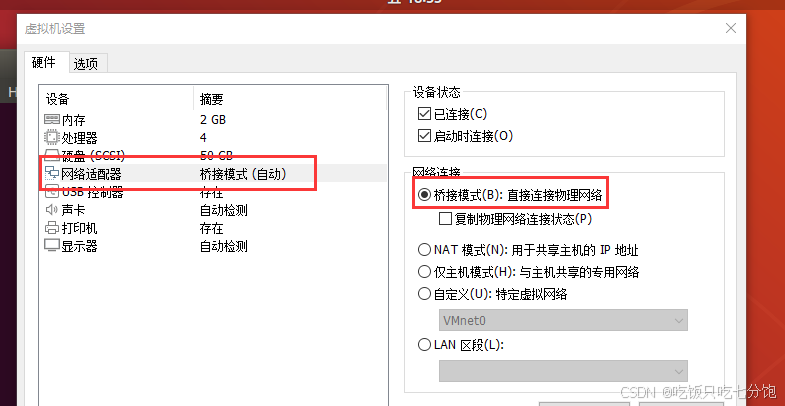
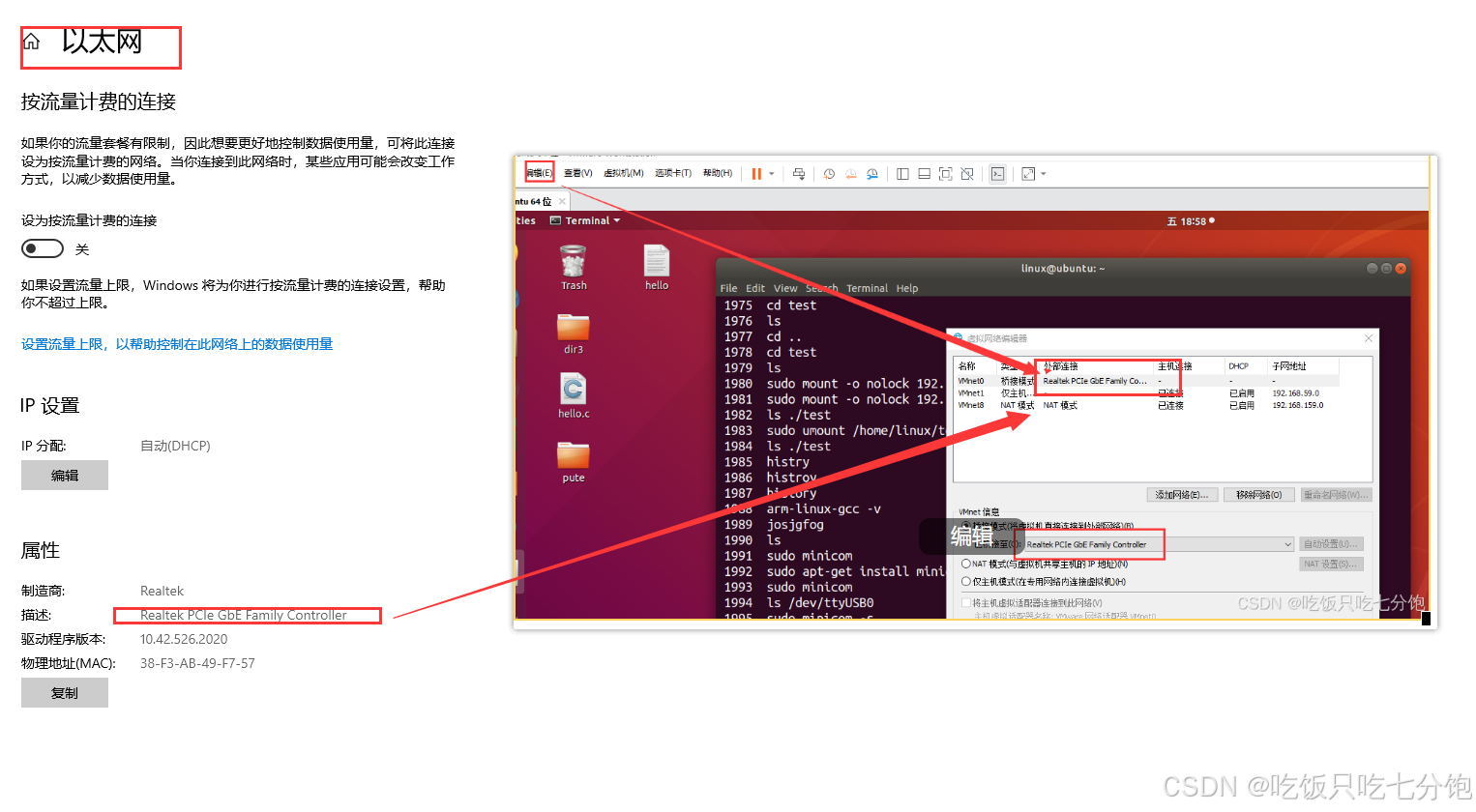
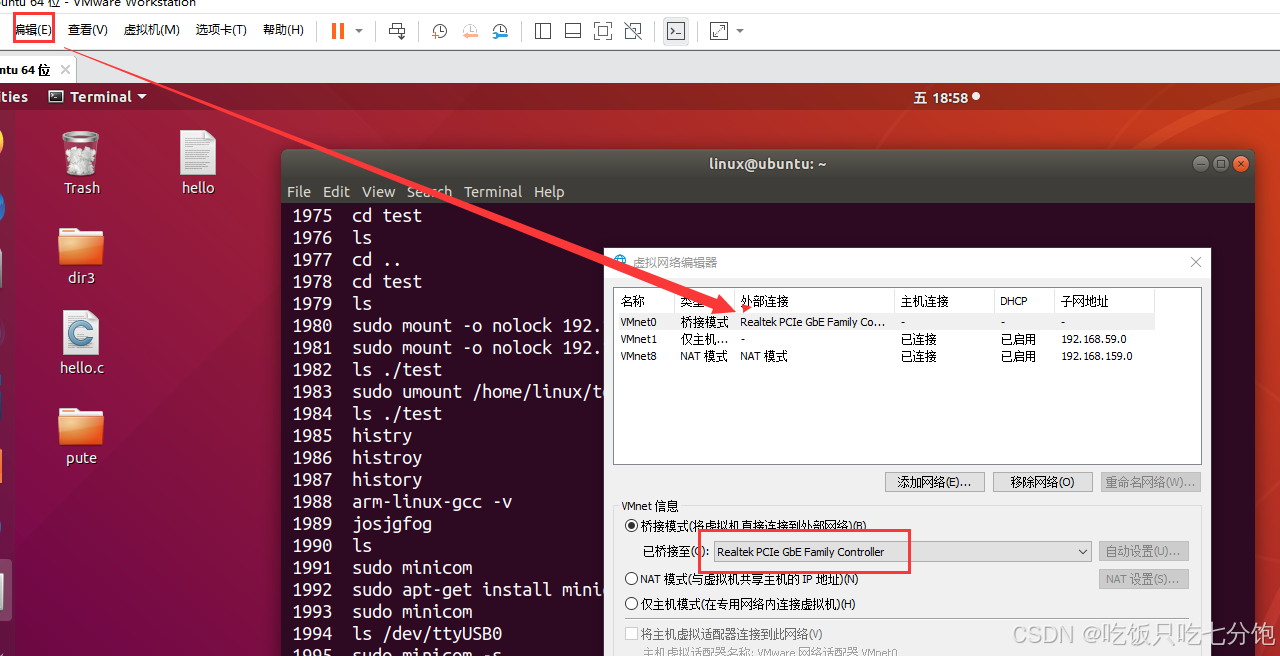
2.选择桥接到以太网模式下
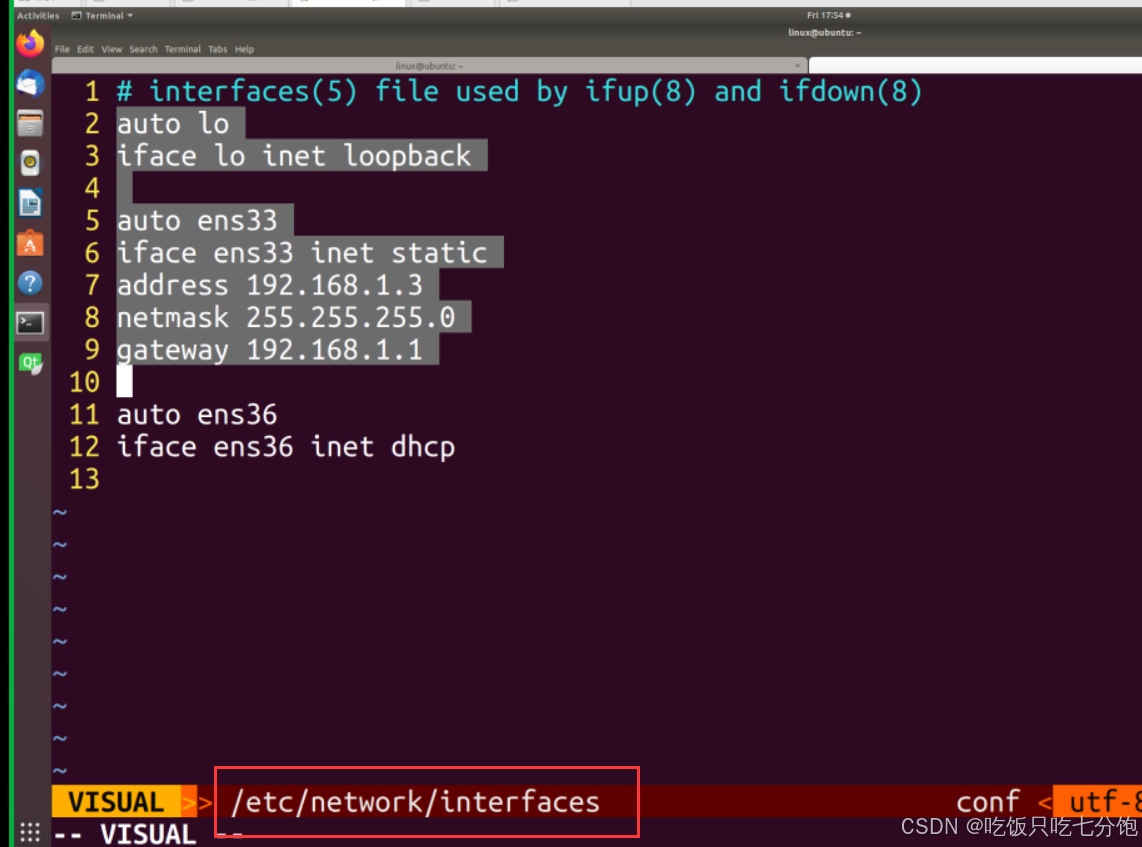
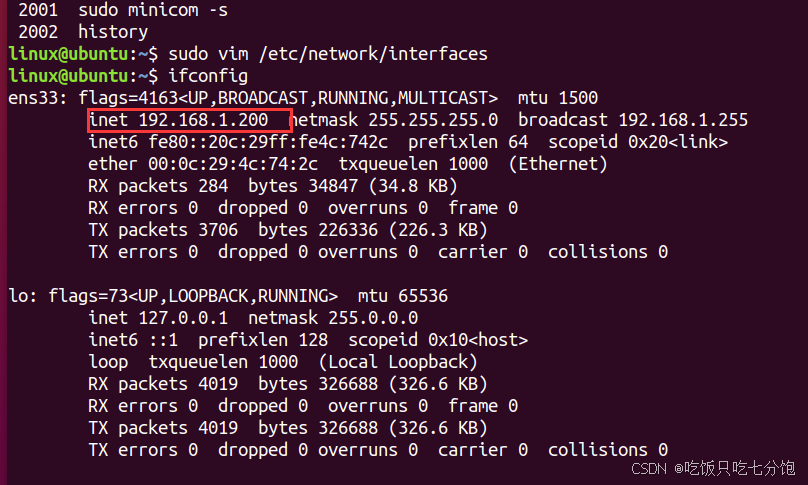
3.输入命令进入编写网络设置,重启虚拟机 用ifconfig函数查看网络ip是否变化

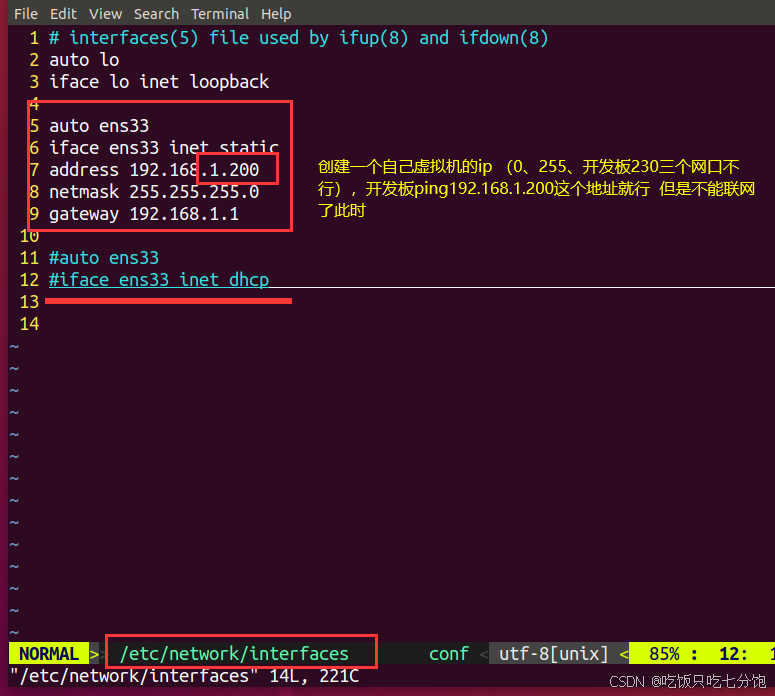
重启后查看虚拟机ip
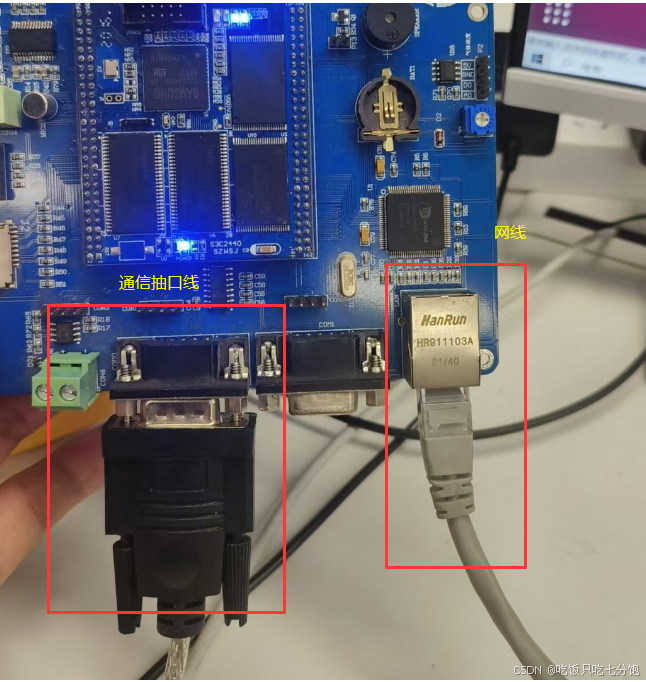
4.连接开发板通信串口线和网线,上电
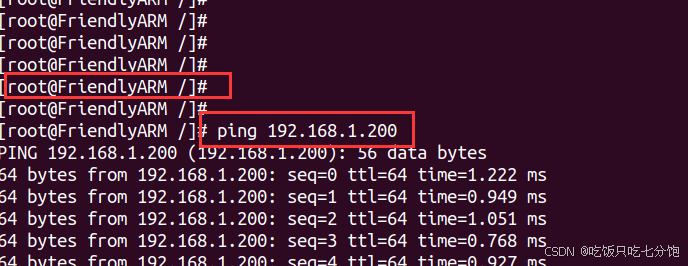
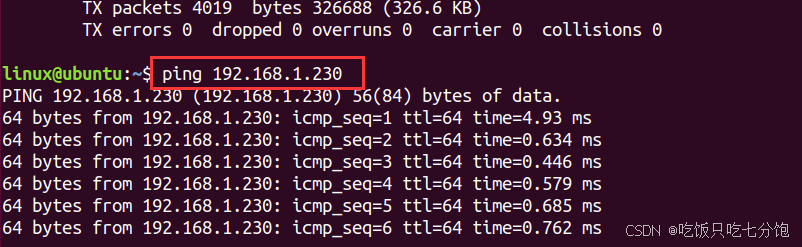
5.ping命令查看是否开发板与虚拟机连网成功,开发板ip为192.168.1.230
6. sudo minicom 进入开发板操作平台,ping虚拟机 虚拟机ip192.168.1.200