目录
一、前言
在现代科技的推动下,机器人技术正逐渐进入我们的生活。而编程作为机器人技术中不可或缺的一环,也成为了众多科技爱好者追逐的目标之一。今天,我将带领大家探索一种新颖而有趣的机器人编程方式------用Python编程实现手机web远程视频监控并控制小车驾驶。
本系列博文将分为上下两篇,分别介绍了在WiFi环境下,如何实现Web端的视频监控和控制远程差速小车的驾驶。上篇将重点介绍如何利用V-REP软件进行仿真车控制,下篇将继续讲解如何实现实物车的控制。
在这个系列博文中,我们将使用Python作为主要编程语言,并利用其强大的库和框架来实现所需功能。而作为Web服务器端,我们将使用Python来搭建服务器,而Web端则使用HTML来实现。
通过这个系列博文的学习,我们将深入了解机器人编程的基本原理和技术,并通过实践来提升自己的编程能力。同时,我们还将学会如何通过手机远程监控和控制机器人,为我们的生活带来更多的便利。
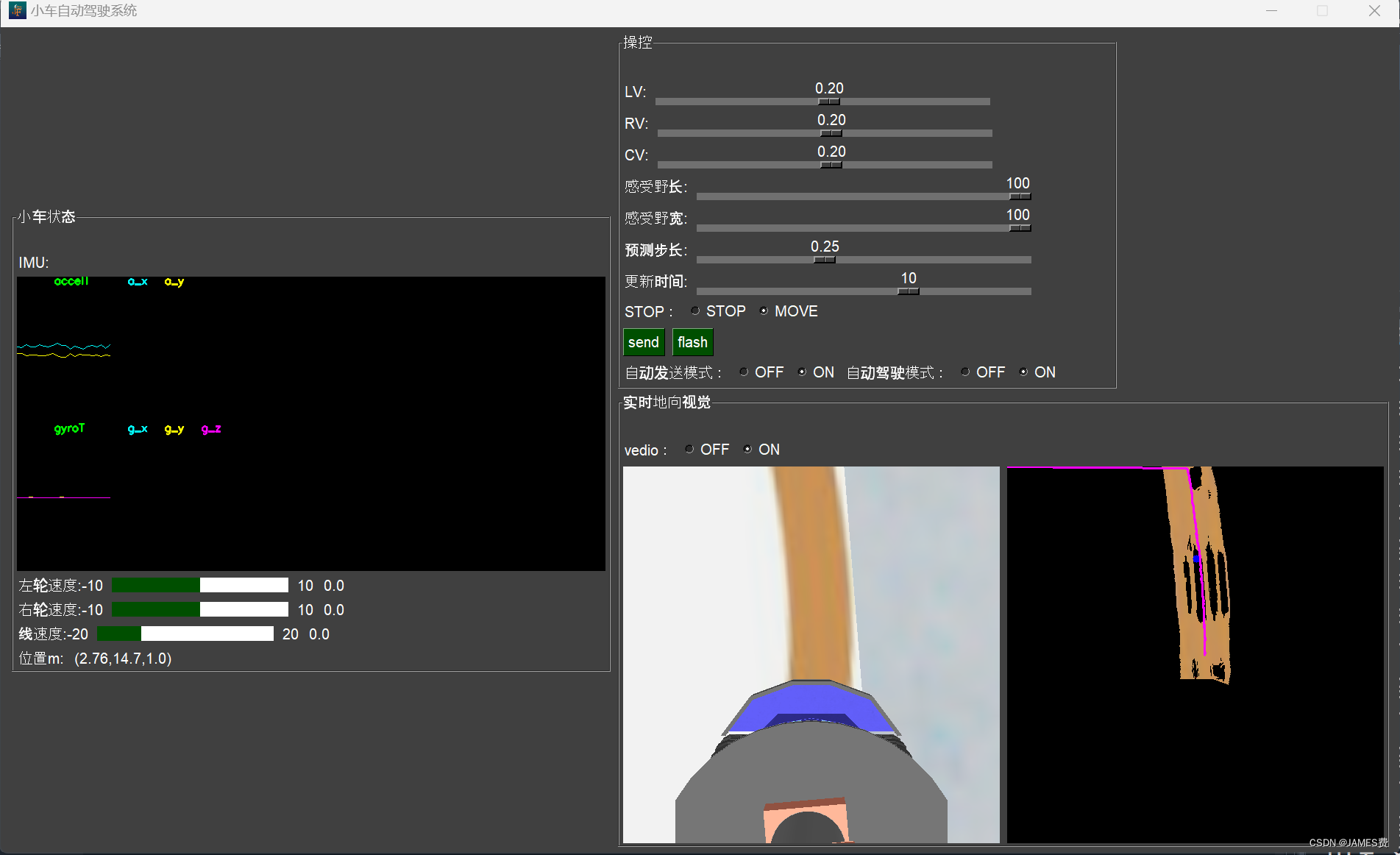
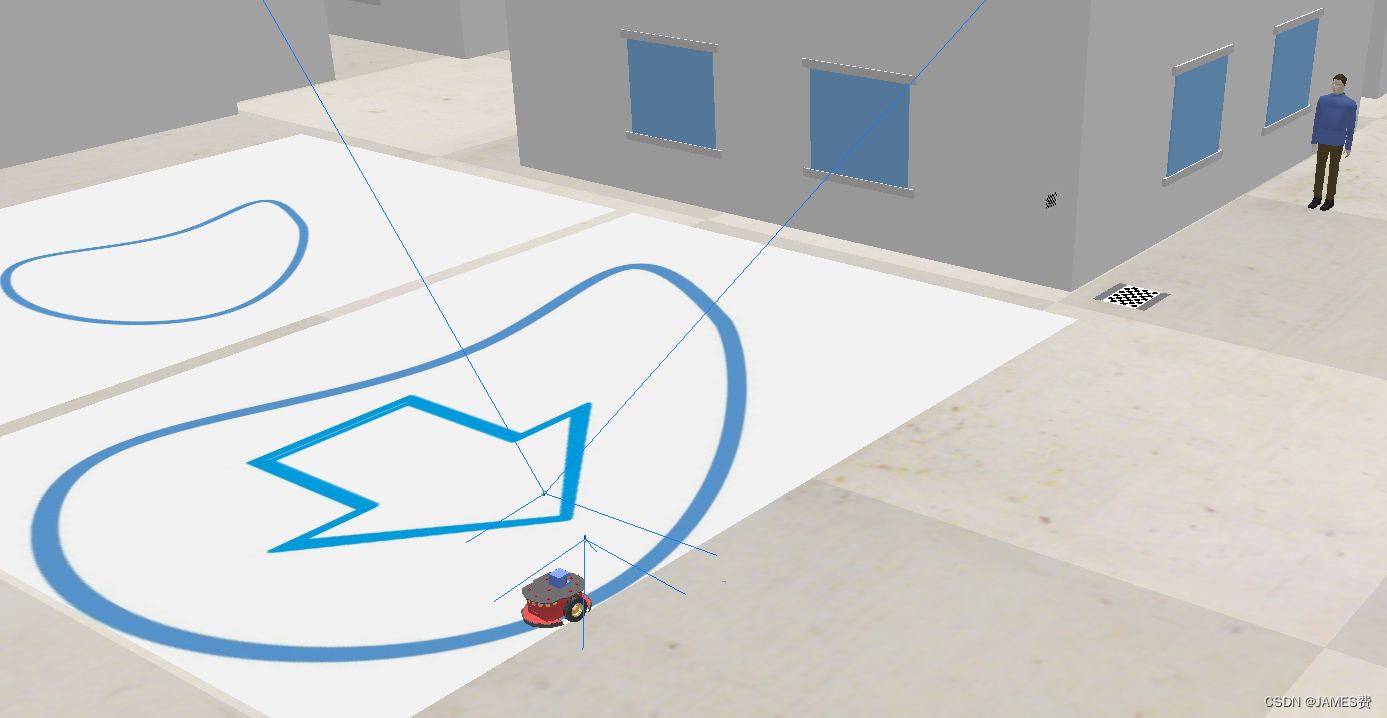
上篇效果如下,左侧时web端可以运行在电脑及手机浏览器,右侧是仿真环境:

以下是python服务器端:

二、技术架构
技术架构主要三个部分,底层为硬件(或仿真环境),实现电机,摄像头和传感器及车架等的设计制造,并提供上层的接口。
中层为控制服务端,主要由python实现,可运行在笔记本和工控机,实现与下层的通讯,及与web端的通讯。主要由采集驱动系列模块,数据服务模块,及操控小车相关的逻辑模块,还有web的服务器模块,摄像头视频服务模块及UI管理操作模块组成。
上层web交互端,主要提供web客户端,UI操控界面,及相应的逻辑模块组成。

三、设备端实现
本篇采用VREP搭建的一个家庭环境并实现小车的活动区域,并加入差速小车配置摄像头,测距雷达等。

然后提供了与上位机通讯的脚本模块:

仿真配套资源已经上传:下载地址
四、服务控制端实现
通过python实现服务控制端。本篇主要介绍web及摄像头服务模块。其它模块处理见此前VREP小车相关博文,或者下篇。
(1)摄像头服务模块
摄像头服务模块,采用了一个知名库mjpeg_streamer,可以很容易实现一个局域网的web视频服务。几行代码就可以:
python
from mjpeg_streamer import MjpegServer, Stream
from socket import *
import numpy as np
import cv2
cap = cv2.VideoCapture(0)
# 设置镜头分辨率,默认是640x480
cap.set(cv2.CAP_PROP_FRAME_WIDTH, 640)
cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 480)
stream = Stream("my_camera", size=(640, 480), quality=50, fps=30)
server = MjpegServer("0.0.0.0", 8000)
server.add_stream(stream)
server.start()
while True:
try:
_, frame = cap.read()
stream.set_frame(frame)
#s.sendto(message.encode(), addr)
#cv2.putText(r_img, "server", (50, 50), cv2.FONT_HERSHEY_SIMPLEX, 1, (255, 0, 0), 2)
cv2.imshow('server', frame)
print("receive")
except BlockingIOError as e:
pass
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cv2.destroyAllWindows()
server.stop()
cap.release()(2)web服务器
web服务采用了知名的fastapi库,自带websocket功能,也是几行代码就可以实现,这里主要注意的是,为了项目主逻辑运行,web要放到子线程中使用。主线程运行后,其它就不能运行了。
fastapi实现websocket也很简单:
python
from fastapi import FastAPI, Response, WebSocket, WebSocketDisconnect
from fastapi.responses import HTMLResponse
from fastapi.staticfiles import StaticFiles
from fastapi.templating import Jinja2Templates
#from starlette.websockets import
import socket
import json
app = FastAPI()
# 设置静态文件和模板
app.mount("/static", StaticFiles(directory="static"), name="static")
templates = Jinja2Templates(directory="templates")
# 获取本机IP地址
def get_local_ip():
try:
s = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
s.connect(("8.8.8.8", 80))
ip = s.getsockname()[0]
finally:
s.close()
return ip
# HTML模板
html_content = """some html"""
@app.get("/", response_class=HTMLResponse)
async def get():
ip = get_local_ip()
return HTMLResponse(html_content+ip+left+ip+tail)
@app.websocket("/ws")
async def websocket_endpoint(websocket: WebSocket):
await websocket.accept()
while True:
try:
data = await websocket.receive_text()
print("receive:",data)
if data=="ping":
await websocket.send_text("pong")
else:
json_data = json.loads(data)
###do something
response_data = {"code": 200,
"left":round(lv_now,2),
"right":round(rv_now,2)}
await websocket.send_text(json.dumps(response_data))
except WebSocketDisconnect:
manager.disconnect(websocket)
await manager.broadcast("A client disconnected.")
import uvicorn
config = uvicorn.Config(app=app, host="0.0.0.0", port=9000)
server = uvicorn.Server(config=config)
singletonThread = threading.Thread(target=server.run)
singletonThread.setDaemon(True)
singletonThread.start()五、web端实现
web端使用与手机远程操控,主要布局设计如下:
各元素数值排列,适合手机端显示。

web端主要实现几个元素为:
(1)视频显示
此处采用标签连接mjpeg_streamer的流,实现视频画面的实时获取,在wif的环境下,实时性还是可以的。如web端不在与服务端同一台机器,则localhost改为服务端的ip地址,实现局域网远程获取画面。
javascript
<img style="-webkit-user-select: none; background-color: hsl(0,8%, 25%);" src="http://localhost:8000/my_camera" width="366*2" height="274*2">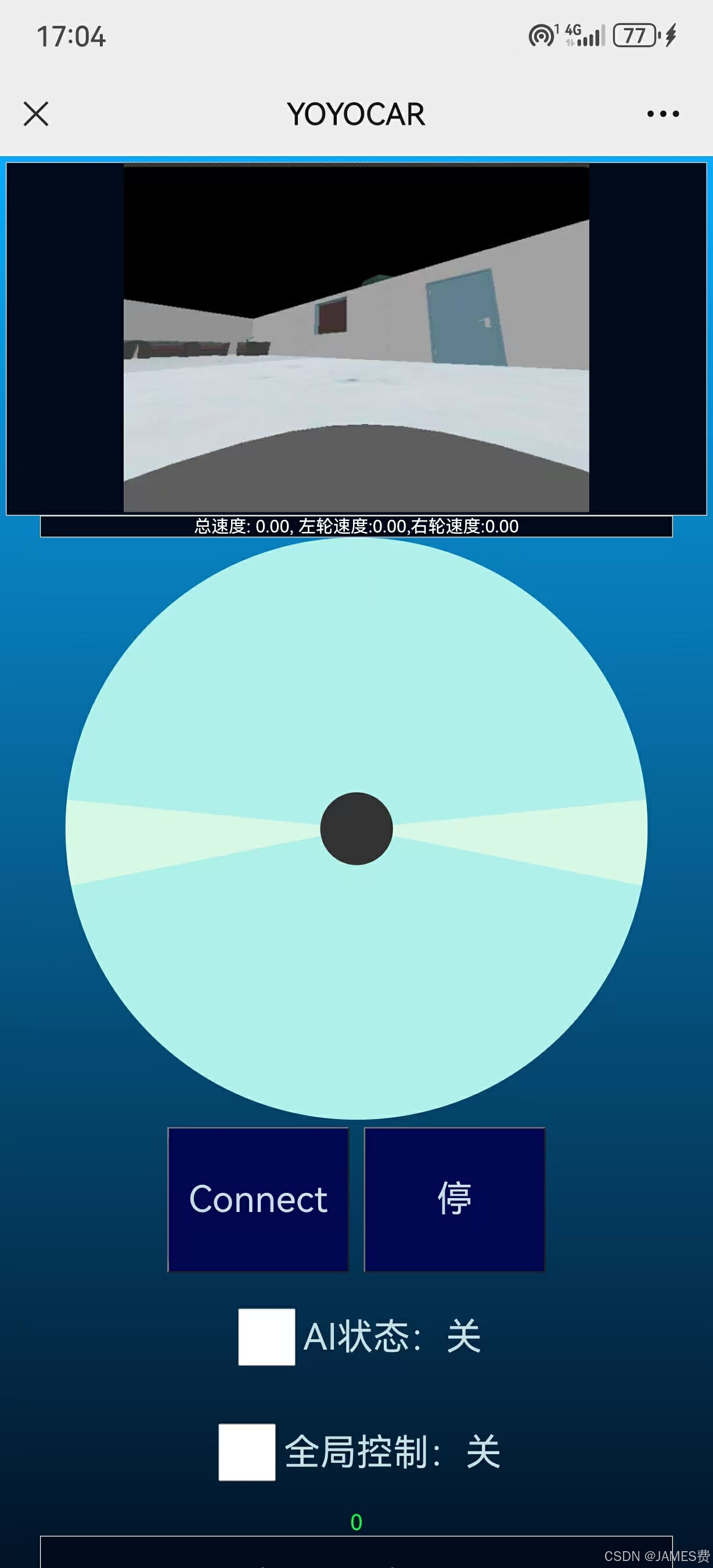
(2)驾驶盘的实现
凭着简洁的思想,驾驶盘采用类似王者等手游的手柄效果,通过拖宅一个焦点在大圆内运动,实现小车两轮速度指令的获取。主要要点是:
1)焦点只能在大圆所在区域运动。

主要代码如下:
javascript
function onMouseMove(e) {
if (isDragging) {
const centerX = e.clientX - bigCircle.getBoundingClientRect().left - (smallCircle.offsetWidth / 2);
const centerY = e.clientY - bigCircle.getBoundingClientRect().top - (smallCircle.offsetHeight / 2);
clampPosition(centerX, centerY);
updateCoordinates(centerX, centerY);
}
}
function clampPosition(centerX, centerY) {
const maxRadius = bigCircle.offsetWidth / 2;
let r=calculateDistanceFromCenter(centerX, centerY);
let xy;
if (r>maxRadius){
xy=[prev_x,prev_y];
}
else{
xy=[centerX,centerY];
prev_x=centerX;
prev_y=centerY;
}
const x=xy[0];
const y=xy[1];
xx=x;
yy=y;
// 设置小圆的左边距
smallCircle.style.left = `${x}px`;
// 设置小圆的上边距
smallCircle.style.top = `${y}px`;
}2)当手或者鼠标释放时,焦点自动回到原心,同时速度指令缓慢归0,这样的目的是当速度较大行驶时,有个缓冲,不至于突然归0,导致击杀。
主要代码如下:
javascript
function returnToCenter() {
smallCircle.style.transition = 'all 0.3s ease-out';
smallCircle.style.left = `${initialX}px`;
smallCircle.style.top = `${initialY}px`;
decreaseValueR()
}
function decreaseValueR() {
const interval = setInterval(() => {
VL=dvv(VL);
VR=dvv(VR);
console.log(`vv: ${VV},vl:${VL},vr:${VR}`);
if (VR==0 && VL==0){
clearInterval(interval);
console.log('R has reached 0');
}
if (VV > 0) {
VV -= maxV/5;
if(VV<0)
VV=0;
//console.log(`vv: ${VV},vl:${VL},vr:${VR}`);
} else if(VV<0) {
VV += maxV/5;
if(VV>0)
VV=0;
}
sendupdate();
}, 100);
}3)捕捉小圆的角度,以及小圆离开圆心的距离,并通过一些坐标变换,换算成小车速度,左右轮速分配比例等
此处canvas坐标是x轴在上,向右为正,y轴在左,向下为正。而我们方向盘的习惯是跟常规解析几何坐标系相同,这里需要做一些变换,来计算小圆跟x轴的夹角,实际上求出来夹角正好正负相反。
javascript
function calculateAngleWithXAxis(x, y) {
const centerX = initialX;
const centerY = initialY;
const deltaX = x - centerX;
const deltaY = y - centerY;
const angle = -Math.atan2(deltaY, deltaX) * (180 / Math.PI); // 夹角刚好正负相反Convert radians to degrees
return angle;
}4)设计了左右两个扇形死区。主要作用一个是避免速度在死区内振荡,因为人的手指也有抖动的时候,二个是把原地旋转刚好做到这个驾驶盘里面,实现了简洁性。
死区的处理:
javascript
if(a>=5 && a<175){
//go forward
VV=r/maxRadius*maxV;
VR=VV*2*rR;
VL=VV*2*rL;
}else if(a>-175 && a<-5){
//go backword
VV=-r/maxRadius*maxV;
VR=VV*2*rR;
VL=VV*2*rL;
}else if(a<=5&&a>=-5){
VV=r/maxRadius*maxV;
VR=-VV;
VL=VV;
}else if(a<=180&&a>=175){
VV=r/maxRadius*maxV;
VR=VV;
VL=-VV;
}else if(a>=-180&&a<=-175){
VV=r/maxRadius*maxV;
VR=VV;
VL=-VV;
}(3)心跳
心跳主要是为了维持远程操控的生命周期,防止一旦超出wifi范围,失去心跳后,小车会立即停止。


整体的操控效果如下:

web端配套资源源代码已经上传,下载地址
六、总结
总体来说,在仿真环境下,操控体验还是比较顺畅。主要一些问题是,摄像头的视野较为狭窄,仿真环境中已经使用了120度的广角,一个措施是更改摄像头的安装位置,装的高一些,看到车头和更广的环境,这样有利于远程驾驶。还有就是,可以把画面做得更大一些。
仿真环境vrep的api,sim.py好像长久获取图像不是很稳定,运行一段实际会出现一些内存错误,但不影响学习研究。下篇,我们将此技术用于实际小车的操控。

七、源码或环境
web端配套资源源代码已经上传(竖屏版),下载地址
仿真配套资源已经上传:下载地址
web端配套资源源代码已经上传(横屏版),下载地址
wifi远程web视频操控机器人小车(python+html
------------本篇完--------------------------
PS.扩展阅读
对于python机器人编程感兴趣的小伙伴,可以进入如下链接阅读相关咨询
ps1.六自由度机器人相关文章资源
(1) 对六自由度机械臂的运动控制及python实现(附源码)

ps2.四轴机器相关文章资源
(1) 文章:python机器人编程------用python实现一个写字机器人

(2)python机器人实战------0到1创建一个自动是色块机器人项目-CSDN直播
(3)博文《我从0开始搭建了一个色块自动抓取机器人,并实现了大模型的接入和语音控制-(上基础篇)》的vrep基础环境
(3)博文《我从0开始搭建了一个色块自动抓取机器人,并实现了大模型的接入和语音控制-(上基础篇)》的vrep基础环境
(4)实现了语音输入+大模型指令解析+机器视觉+机械臂流程打通
ps3.移动小车相关文章资源
(1)python做了一个极简的栅格地图行走机器人,到底能干啥?第五弹------解锁蒙特卡洛定位功能-CSDN博客
(2) 对应python资源:源码地址
(3)python机器人编程------差速AGV机器、基于视觉和预测控制的循迹、自动行驶(上篇)_agv编程-CSDN博客
(4)python机器人编程------差速AGV机器、基于视觉和预测控制的循迹、自动行驶(下篇)_agv路线规划原则python-CSDN博客
对应python及仿真环境资源:源码链接