质点的角动量
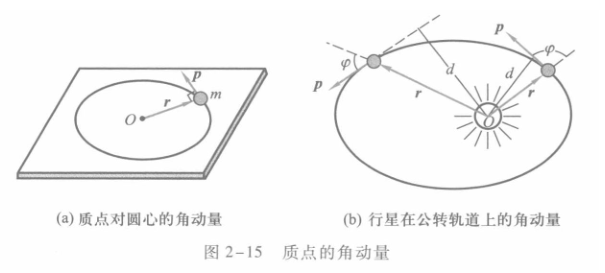
角动量是矢量,可用位矢和动量的矢积表示:
\\\vec{L} = \\vec{r} \\times \\vec{p} \\tag{1} \\
惯性张量
对于通过质心,绕任意轴以角速度\(\omega\)旋转的刚体,对于质心的角动量定义为:
\H_{cg} = \\int(\\vec{r} \\times (\\vec{\\omega} \\times \\vec{r})) dm \\
r和w可以写成向量:
\\\vec{r} = x\\vec{i} + y\\vec{j} + z\\vec{z} \\
\\\vec{\\omega} = \\omega_x\\vec{i} + \\omega_y\\vec{j} + \\omega_z\\vec{z} \\
向量叉乘可以写成矩阵和向量相乘的形式:
\\\vec{r} \\times \\vec{q} = \\begin{bmatrix} r_y q_z - r_z q_y \\\\ r_z q_x - r_x q_z \\\\ r_x q_y -r_y q_x \\end{bmatrix} = \\begin{bmatrix} 0 \& -r_z \& r_y \\\\ r_z \& 0 \& -r_x \\\\ -r_y \& r_x \& 0 \\end{bmatrix} \\begin{bmatrix} q_x \\\\ q_y \\\\ q_z \\end{bmatrix} \\
因此展开角动量公式里的叉乘:
\H_{cg} = \\int(\\vec{r} \\times (\\vec{\\omega} \\times \\vec{r})) dm = \\int( \\begin{bmatrix} 0 \& -z \& y \\\\ z \& 0 \& -x \\\\ -y \& x \& 0 \\end{bmatrix} \\begin{bmatrix} 0 \& -\\omega_z \& \\omega_y \\\\ \\omega_z \& 0 \& -\\omega_x \\\\ -\\omega_y \& \\omega_x \& 0 \\end{bmatrix} \\begin{bmatrix} x \\\\ y \\\\ z \\end{bmatrix} ) dm \\\\ = \\int( \\begin{bmatrix} -z\\omega_z-y\\omega_y \& y\\omega_x \& z\\omega_x \\\\ x\\omega_y \& -z\\omega_z-x\\omega_x \& z\\omega_y \\\\ x\\omega_z \& y\\omega_z \& -y\\omega_y-x\\omega_x \\end{bmatrix} \\begin{bmatrix} x \\\\ y \\\\ z \\end{bmatrix} ) dm \\\\ = \\int( \\begin{bmatrix} (y\^2+z\^2)\\omega_x-xz\\omega_z - xy\\omega_y \\\\ (x\^2+z\^2)\\omega_y -yz\\omega_z-xy\\omega_x \\\\ (x\^2+y\^2)\\omega_z - yz\\omega_y - xz\\omega_x \\end{bmatrix} ) dm \\\\ \\
令:
\I_{xx} = \\int(y\^2+z\^2)dm \\
\I_{yy} = \\int(x\^2+z\^2)dm \\
\I_{zz} = \\int(y\^2+x\^2)dm \\
\I_{xy} = I_{yx} = \\int(xy)dm \\
\I_{xz} = I_{zx} = \\int(xz)dm \\
\I_{yz} = I_{zy} = \\int(yz)dm \\
上式可改写为:
\H_{cg} = \\begin{bmatrix} I_{xx}\\omega_x-I_{xz}\\omega_z - I_{xy}\\omega_y \\\\ I_{yy}\\omega_y -I_{yz}\\omega_z-I_{xy}\\omega_x \\\\ I_{zz}\\omega_z -I_{yz}\\omega_y - I_{xz}\\omega_x \\end{bmatrix} \\\\ = \\begin{bmatrix} I_{xx} \& -I_{xy} \& -I_{xz} \\\\ -I_{xy} \& I_{yy} \& -I_{yz} \\\\ -I_{xz} \& -I_{yz} \& I_{zz} \\\\ \\end{bmatrix} \\begin{bmatrix} \\omega_x \\\\ \\omega_y \\\\ \\omega_z \\end{bmatrix} \\
令矩阵I:
\I = \\begin{bmatrix} I_{xx} \& -I_{xy} \& -I_{xz} \\\\ -I_{xy} \& I_{yy} \& -I_{yz} \\\\ -I_{xz} \& -I_{yz} \& I_{zz} \\\\ \\end{bmatrix} \\
最终得到:
\H_{cg} = I\\vec{\\omega} \\
I就是转动惯量。
上式两边对于时间求导,在极短的时间内可以认为惯性矩阵I是常量:
\\\frac{d H_{cg}}{dt} = I \\frac{d \\vec{\\omega}}{dt} = I \\vec{\\alpha} \\
根据角动量定理(总外力矩等于刚体角动量的时间变化率),左侧就是外力矩,因此:
\\\vec{M} = I \\vec{\\alpha} \\Rightarrow I\^{-1} \\vec{M} = \\vec{\\alpha} \\tag{6} \\
这是旋转的运动学公式,总外力矩克服转动惯量,给予物体于角加速度。
和平移运动公式\(\vec{F}=m\vec{a}\)具有一样结构和地位。
计算转动惯量
\I_{xx} = \\int(y\^2+z\^2)dm \\
\I_{yy} = \\int(x\^2+z\^2)dm \\
\I_{zz} = \\int(y\^2+x\^2)dm \\
\I_{xy} = I_{yx} = \\int(xy)dm \\
\I_{xz} = I_{zx} = \\int(xz)dm \\
\I_{yz} = I_{zy} = \\int(yz)dm \\
\I = \\begin{bmatrix} I_{xx} \& -I_{xy} \& -I_{xz} \\\\ -I_{xy} \& I_{yy} \& -I_{yz} \\\\ -I_{xz} \& -I_{yz} \& I_{zz} \\\\ \\end{bmatrix} \\
根据它的定义,坐标系恒定情况下,当物体姿态发生变化后,各个质量微原的位置发生了变化,因此每个量都需要重新计算,这带来了很大计算量。
然而实际不需要那么麻烦。
将I写成另一种形式:
\I=\\sum m_i(r_i\^T r_i 1 - r_i r_i\^T) \\
其中 1代表单位矩阵。
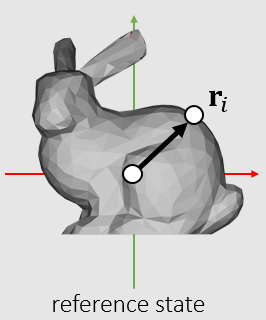
如图在参考姿态下:
\I_{ref}=\\sum m_i(r_i\^T r_i 1 - r_i r_i\^T) \\
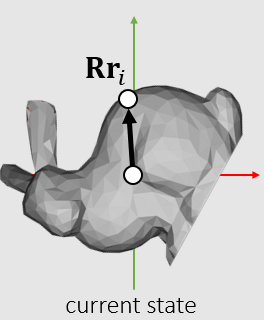
当物体旋转后,原来的微原位于\(Rr_i\)处,因此
\I=\\sum m_i((Rr_i)\^T (Rr_i) 1 - (Rr_i) (Rr_i)\^T) \\\\ =\\sum m_i(r_i\^T R\^T Rr_i 1 - Rr_i r_i\^T R\^T) \\\\ =\\sum m_i(r_i\^T r_i 1 - Rr_i r_i\^T R\^T) \\\\ =\\sum m_i(R r_i\^T r_i 1 R\^T - Rr_i r_i\^T R\^T) \\\\ =\\sum m_i R(r_i\^T r_i 1 - r_i r_i\^T) R\^T \\\\ =R I_{ref} R\^T \\
最后:
\I = R I_{ref} R\^T \\