十七、day17
之前我们介绍了IOServicePool的方式,一个IOServicePool开启n个线程和n个iocontext,每个线程内独立运行iocontext, 各个iocontext监听各自绑定的socket是否就绪,如果就绪就在各自线程里触发回调函数。为避免线程安全问题,我们将网络数据封装为逻辑包投递给逻辑系统,逻辑系统有一个单独线程处理,这样将网络IO和逻辑处理解耦合,极大的提高了服务器IO层面的吞吐率。
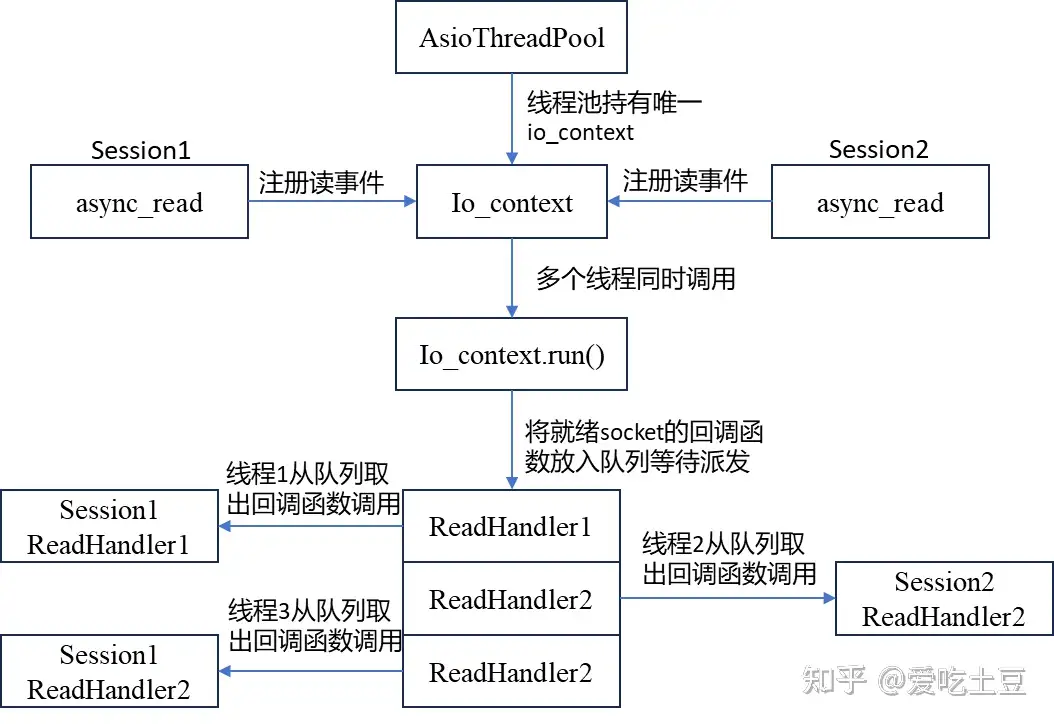
今天给大家介绍asio多线程模式的第二种多线程模式IOThreadPool,我们只初始化一个iocontext用来监听服务器的读写事件,包括新连接到来的监听也用这个iocontext。只是我们让iocontext.run在多个线程中调用,启动一个 io_context,由多个线程共享,这样回调函数就会被不同的线程触发,从这个角度看回调函数被并发调用了。
1. IOThreadPool实现
1) IOThreadPool.h
cpp
#pragma once
#include "Singleton.h"
#include <boost/asio.hpp>
class AsioThreadPool : public Singleton<AsioThreadPool>
{
public:
friend class Singleton<AsioThreadPool>;
~AsioThreadPool() {}
AsioThreadPool& operator = (const AsioThreadPool&) = delete;
AsioThreadPool(const AsioThreadPool&) = delete;
boost::asio::io_context& GetIOService();
void Stop();
private:
AsioThreadPool(int threadNum = std::thread::hardware_concurrency());
boost::asio::io_context _service;
std::unique_ptr<boost::asio::io_context::work> _work;
std::vector<std::thread> _threads;
};- AsioThreadPool也是单例模式,需继承单例模板类Singleton<T>
- _service:AsioThreadPool多线程模式中,只有一个io_context进行不同线程的调度,所以仅初始化一个ioc
- _work:work的数量与ioc相同,有且仅有一个
- _threads:线程数,默认与cpu核数相同
AsioThreadPool继承 Singleton 模板类时,Singleton 类的拷贝构造函数和赋值运算符已经被删除,这意味着AsioThreadPool也会继承这些删除操作。因此,派生类默认不能被拷贝或赋值,也不需要再次delte拷贝或者赋值,但是可以写上增加代码阅读性。
2)AsioThreadPool构造函数
cpp
AsioThreadPool::AsioThreadPool(int threadNum) : _work(new boost::asio::io_context::work(_service)){
for (int i = 0; i < threadNum; ++i) {
_threads.emplace_back([this]() {
_service.run();
});
}
}注意:work是通过std::unique_ptr进行管理的,所以work不能被拷贝,仅仅可以通过移动语义转移。
将AsioThreadPool池中唯一的ioc与work绑定,防止ioc返回,然后启动threadNum 个线程,每个线程中都调用**_service.run()。**
_service.run 函数内部就是从iocp或者epoll获取就绪描述符和绑定的回调函数 ,进而调用回调函数,因为回调函数是在不同的线程里调用的,所以会存在不同的线程调用同一个socket的回调函数的情况。
_service.run内部在Linux环境下调用的是epoll_wait返回所有就绪的描述符列表,在windows上会循环调用GetQueuedCompletionStatus函数返回就绪的描述符,二者原理类似,进而通过描述符找到对应的注册的回调函数,然后调用回调函数。
二者的流程如下:
a. IOCP
- IOCP的使用主要分为以下几步:
1 创建完成端口(iocp)对象
2 创建一个或多个工作线程,在完成端口上执行并处理投递到完成端口上的I/O请求
3 Socket关联iocp对象,在Socket上投递网络事件
4 工作线程调用GetQueuedCompletionStatus函数获取完成通知封包,取得事件信息并进行处理。该函数会阻塞,直到有I/O操作完成并返回相应的事件信息,线程接收到通知后就可以处理对应的I/O请求。
b. epoll
- 调用epoll_creat在内核中创建一张epoll表,这张 epoll 表用于管理要监视的文件描述符
- 开辟一片包含n个epoll_event大小的连续空间,这个空间的大小是预期要监听的事件数量 n,以便存放准备好的事件信息。
- 将要监听的socket(或其他文件描述符)注册到epoll表里,可以指定需要监听的事件类型(如可读、可写等),并将其与之前创建的 epoll 实例关联。
- 调用epoll_wait,传入之前我们开辟的连续空间,这一调用会阻塞,直到有事件发生。一旦有事件就绪,epoll_wait 会返回就绪的 epoll_event 列表,并将对应的 Socket 信息写入之前开辟的内存空间中,供后续处理。
3)其他函数
cpp
boost::asio::io_context& AsioThreadPool::GetIOService() {
return _service;
}
void AsioThreadPool::Stop() {
_work.reset();
for (auto& t : _threads) {
t.join();
}
}- GetIOService()用于返回多线程池中唯一的上下文服务
- Stop()用于将work释放,以便ioc可以返回
2. 隐患及如何解决
IOThreadPool模式有一个隐患,同一个socket的就绪后,触发的回调函数可能在不同的线程里,比如第一次是在线程1,第二次是在线程3,如果这两次触发间隔时间不大,那么很可能出现不同线程并发访问数据的情况,比如在处理读事件时,第一次回调触发后我们从socket的接收缓冲区读数据出来,第二次回调触发,还是从socket的接收缓冲区读数据,就会造成两个线程同时从socket中读数据的情况,会造成数据混乱。因为多个线程都会执行io_context.run(),每次调用都会返回一些就绪的回调函数,比如,线程1调用io_context.run()返回ReadHandler1以及绑定的socket,线程2调用io_context.run()返回ReadHandler2以及绑定的socket,线程3调用io_context.run()返回ReadHandler3以及绑定的socket,但是ReadHandler1和ReadHandler3都是session1调用的,那么可能会导致多个线程同时处理相同的回调,导致线程安全问题
注 :但如果回调函数被派发到逻辑队列中或者进行加锁,那么就不会存在不同线程访问同一个socket数据的线程安全问题。这里的隐患是不通过队列或者加锁,处理逻辑问题会存在线程安全问题。
1)通过strand改进
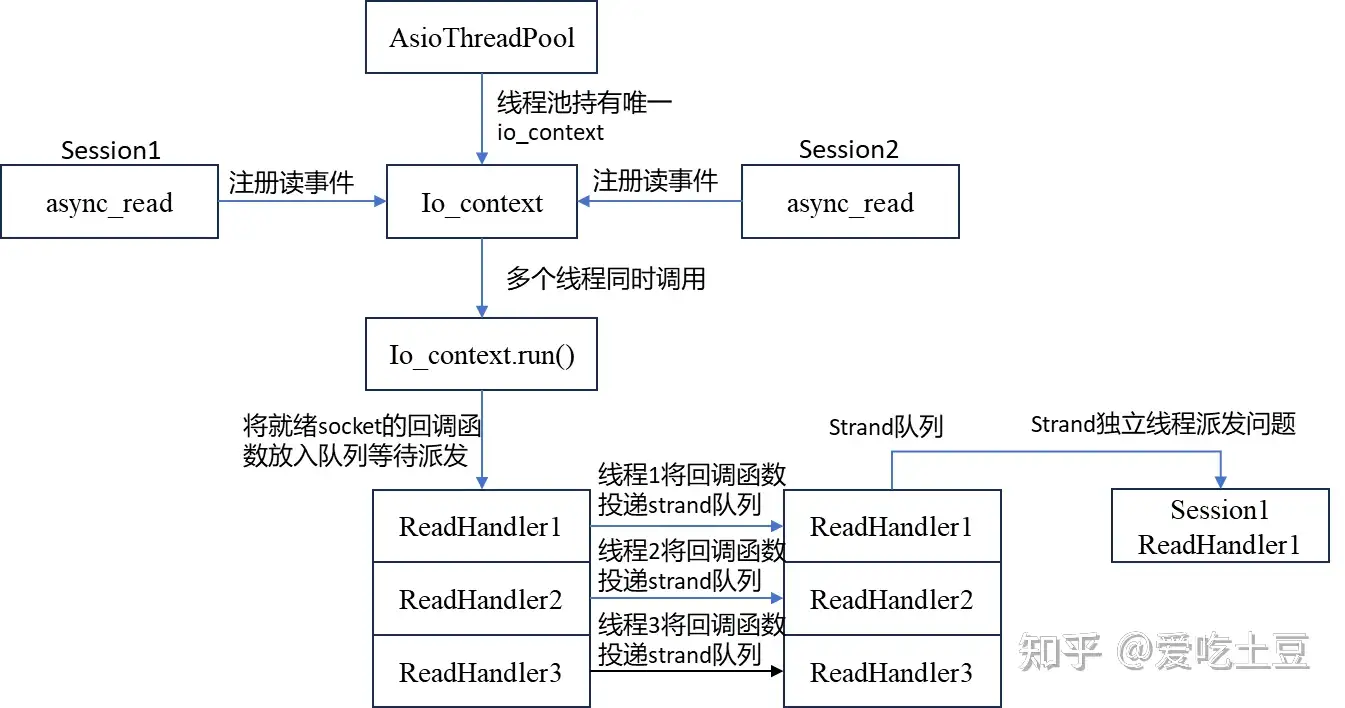
在多线程环境中触发回调函数时,我们可以使用 asio 提供的串行类 strand 来进行封装,从而实现串行调用。其基本原理是:**每个线程在调用函数时,不直接执行该函数,而是将要调用的函数投递到由 strand 管理的队列中;随后,由一个统一的线程从队列中取出并调用这些回调函数。**通过这种方式,函数调用是串行进行的,从而解决由于线程并发带来的安全问题。
使用strand进行封装
图中当socket就绪后并不是由多个线程调用每个socket注册的回调函数,而是将回调函数投递给strand管理的队列,再由strand统一调度派发。为了让回调函数被派发到strand的队列,我们只需要在注册回调函数时加一层strand的包装即可。
strand 实际上是将回调函数放入同一个队列(如果有逻辑层或者通过加锁处理回调,那么就不需要strand) ,以确保线程安全。因此,在描述符就绪后,相应的回调会被放入该队列中进行处理。虽然使用 strand 可以保证在多线程环境下的安全性,但在触发时仍然是单线程的,这限制了整体性能。因此,尽管多线程可以提高读写事件的派发效率,但整体性能通常不如IOService_pool 这种方式更优。在实际工作中,我们通常选择使用 IOService_pool,因为它能够更好地平衡并发和性能。
a. CSession类中新增成员变量_strand
cpp
boost::asio::strand<boost::asio::io_context::executor_type> _strand;b. 修改CSession的构造函数
cpp
CSession::CSession(boost::asio::io_context& io_context, CServer* server):
_socket(io_context), _server(server), _b_close(false),
_b_head_parse(false), _strand(io_context.get_executor()){
boost::uuids::uuid a_uuid = boost::uuids::random_generator()();
_uuid = boost::uuids::to_string(a_uuid);
_recv_head_node = make_shared<MsgNode>(HEAD_TOTAL_LEN);
}可以看到**_strand** 的初始化是放在初始化列表里,利用**io_context.get_executor()**返回的执行器构造strand。因为在asio中无论iocontext还是strand,底层都是通过executor调度的,我们将他理解为调度器就可以。如果多个iocontext和strand的调度器是一个,那他们的消息派发统一由这个调度器执行。我们利用iocontext的调度器构造strand,这样他们统一由一个调度器管理。在绑定回调函数的调度器时,我们选择strand绑定即可。
比如我们在Start 函数里添加绑定 ,将回调函数的调用者绑定为**_strand**
cpp
void CSession::Start(){
::memset(_data, 0, MAX_LENGTH);
_socket.async_read_some(boost::asio::buffer(_data, MAX_LENGTH),
boost::asio::bind_executor(_strand, std::bind(&CSession::HandleRead, this,
std::placeholders::_1, std::placeholders::_2, SharedSelf())));
}修改前的代码为:
cpp
void CSession::Start() {
memset(_data, 0, MAX_LENGTH); // 缓冲区清零
// 从套接字中读取数据,并绑定回调函数headle_read
_socket.async_read_some(boost::asio::buffer(_data, MAX_LENGTH),
std::bind(&CSession::headle_read, this, std::placeholders::_1, std::placeholders::_2,
shared_from_this()));
//_socket.async_read_some(boost::asio::buffer(_data, MAX_LENGTH),
// boost::asio::bind_executor(_strand,
// std::bind(&CSession::headle_read, this, std::placeholders::_1, std::placeholders::_2,shared_from_this())));
}同样的道理,在所有收发的地方,都将调度器绑定为**_strand**, 比如发送部分我们需要修改为如下
cpp
auto& msgnode = _send_que.front();
boost::asio::async_write(_socket, boost::asio::buffer(msgnode->_data, msgnode->_total_len),
boost::asio::bind_executor(_strand, std::bind(&CSession::HandleWrite, this, std::placeholders::_1, SharedSelf()))
);3. 客户端
cpp
int main()
{
try {
auto pool = AsioThreadPool::GetInstance();
boost::asio::io_context ioc;
boost::asio::signal_set signals(ioc, SIGINT, SIGTERM);
// 必须异步等待,否则建立线程进行处理
signals.async_wait([&ioc, pool](const boost::system::error_code& error, int signal_number) {
if (!error) {
std::cout << "Signal " << signal_number << " received." << std::endl;
ioc.stop(); // 停止 io_context
pool->Stop();
std::unique_lock<std::mutex> lock(mutex_quit);
bstop = true;
cond_quit.notify_one();
}
});
CServer s(pool->GetIOService(), 10086);
ioc.run();
{
std::unique_lock<std::mutex> lock(mutex_quit);
while (!bstop) {
cond_quit.wait(lock);
}
}
}
catch (std::exception& e) {
std::cerr << "Exception: " << e.what() << '\n';
}
boost::asio::io_context io_context;
}之所以用条件变量是因为传入Server的ioc是从线程池中获得的,Server初始化之后并没有调用ioc.run(),线程池中的ioc是运行在自己的线程中的,下面这段是运行在主线程中的,是为了防止主线程结束了而子线程还在运行,所以必须设置条件变量防止主线程结束
cpp
{
std::unique_lock<std::mutex> lock(mutex_quit);
while (!bstop) {
cond_quit.wait(lock);
}
}如果不设置条件变量使主线程挂起,那么当主线程结束后,如果server还没有跑起来,server相当于子线程,那么会直接让子线程结束
cpp
CServer s(pool->GetIOService(), 10086);单独生成一个ioc运行监听信号,当收到两个退出信号时,服务器退出,而server的ioc是从线程池中获取的。当获取到退出信号时,首先将监听信号的ioc退出,然后将线程池的unique_ptr释放work,使得线程池中的ioc能退出,最后上锁然后唤醒主线程,主线程结束。
cpp
std::cout << "Signal " << signal_number << " received." << std::endl;
ioc.stop(); // 停止 io_context
pool->Stop();
std::unique_lock<std::mutex> lock(mutex_quit);
bstop = true;
cond_quit.notify_one();4. 总结
1. 在IOServicePool示例中,使用main函数中定义的io_context来监听异常信号signal,并且用于初始化Server来监听接收信号;但在IOThreadPool示例中,main函数定义的ioc仅仅用于监听异常信号,而初始化Server启动异步接收async_accept是通过线程池中的ioc。
这是因为
第一种方式调用了n+1个ioc.run(),第二种方式调用了2个ioc.run()
- 前者在main函数中处理信号监听和Server任务,当main中的ioc接收到客户端连接之后,生成一个子session,并从IOServicePool线程池中取一个ioc用于管理子Session的收发。也就是说,main中的ioc用于监听信号和server任务处理,而线程池中的ioc用于处理子Session的收发。main中的ioc一旦停止,那么服务器就会停止客户端的连接服务,session任务不会在增加,而线程池中的ioc全部停止后,线程的收发就会停止。
- 后者再main函数中处理监听信号任务,而server任务处理交给了线程池IOThreadPool中唯一的ioc进行处理。也就是说,让一个ioc单独监听信号,另一个ioc运行在多线程中做收发。main中的ioc停止后,仅仅只是服务器的信号监听停止了,而server的任务处理以及session的收发仍然会持续。
此外,他们的退出机制也有些不同。
- 第一种方式 :信号处理函数在
ioc上注册,当收到信号时,会调用ioc.stop()停止io_context,并调用线程池的Stop方法停止线程池的运行。这种方式不需要额外的同步机制,因为主线程就是ioc.run()的执行线程,一旦停止,就会退出。 - 第二种方式 :信号处理函数在主线程的
ioc上注册,但实际处理的 I/O 事件由线程池中的io_context完成。为了协调多线程退出,需要使用mutex和条件变量(cond_quit)来确保所有线程安全地退出。信号处理函数在停止io_context后,会通知等待在条件变量上的线程退出,从而确保整个程序能够正确结束。
2. 哪一种多线程模式的效率最高?
直观上来说可能二者的效率都差不多?其实IOServicePool的效率略高于IOThreadPool。
IOThreadPool 通常会涉及到 strand ,strand 的作用是将回调函数放入同一个队列中 执行,以确保线程安全(如果逻辑层或者通过加锁已经处理了回调的同步问题,那么就不需要使用 strand)。在这种机制下,当描述符就绪时,相应的回调会被放入这个队列中依次处理。虽然 strand 可以确保多线程环境下的安全性,但由于回调函数的执行是串行的,所以在事件触发时仍然是单线程操作,这在一定程度上限制了整体性能的提升。
尽管多线程模式确实能提高读写事件的派发效率,但由于 strand 的串行限制,整体性能通常不如使用 IOService_pool 的方式。在实际工作中,我们更倾向于使用 IOService_pool,因为它在保证线程安全的同时,能够更好地利用并发性,提升程序性能和效率。