WIN10安装WSL
Microsoft Store

安装编译套件
sudo apt-get install build-essential
apt换源
Debian / Ubuntu 的官方源在国内访问很慢,咱们更换为清华大学 TUNA 的软件源镜像
-
执行下面命令,备份 apt 安装源:
sudo cp /etc/apt/sources.list /etc/apt/sources.list.bak -
vim编辑sources.list
sudo vim /etc/apt/sources.list -
将 sources.list 中的内容替换如下:
- 注意:这里是
Ubuntu 18.04 LTS - 如果是其他版本的ubuntu,自行访问[清华大学开源软件镜像站](https://link.zhihu.com/?target=https%3A//mirror.tuna.tsinghua.edu.cn/help/ubuntu/)去查找对应版本的镜像配置
- 注意:这里是
bash
# 默认注释了源码镜像以提高 apt update 速度,如有需要可自行取消注释
deb <https://mirrors.tuna.tsinghua.edu.cn/ubuntu/> bionic main restricted universe multiverse
# deb-src <https://mirrors.tuna.tsinghua.edu.cn/ubuntu/> bionic main restricted universe multiverse
deb <https://mirrors.tuna.tsinghua.edu.cn/ubuntu/> bionic-updates main restricted universe multiverse
# deb-src <https://mirrors.tuna.tsinghua.edu.cn/ubuntu/> bionic-updates main restricted universe multiverse
deb <https://mirrors.tuna.tsinghua.edu.cn/ubuntu/> bionic-backports main restricted universe multiverse
# deb-src <https://mirrors.tuna.tsinghua.edu.cn/ubuntu/> bionic-backports main restricted universe multiverse
deb <https://mirrors.tuna.tsinghua.edu.cn/ubuntu/> bionic-security main restricted universe multiverse
# deb-src <https://mirrors.tuna.tsinghua.edu.cn/ubuntu/> bionic-security main restricted universe multiverse
# 预发布软件源,不建议启用
# deb <https://mirrors.tuna.tsinghua.edu.cn/ubuntu/> bionic-proposed main restricted universe multiverse
# deb-src <https://mirrors.tuna.tsinghua.edu.cn/ubuntu/> bionic-proposed main restricted universe multiverse配置SSH服务器
WSL 上的 SSH 服务器没有自动配置,需要手动重新安装,首先可以运行以下命令来检查;
bash
$ sudo service ssh stop
$ sudo /usr/sbin/sshd -d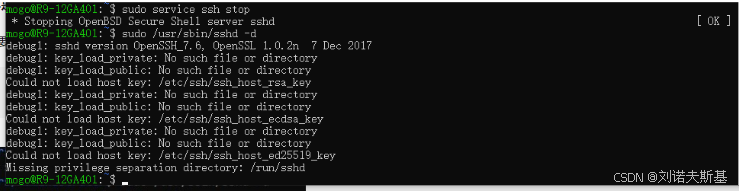
如果输出信息包括以上信息,即找不到 key,重新安装 openssh-server 就可以解决问题
text
$ sudo apt purge openssh-server
$ sudo apt-get update
$ sudo apt install openssh-server配置 /etc/ssh/sshd_config,用 sudo 权限运行 vim 修改如下三个关键字
记得删除 #
text
Port 22
# 这两行允许了 root 账户和密码登录
PermitRootLogin yes
PasswordAuthentication yes手动启动服务
text
$ sudo /etc/init.d/ssh start
$ sudo service ssh status安装ROS
在 Ubuntu18.04 中安装 ROS Melodic
http://wiki.ros.org/cn/melodic/Installation/Ubuntu
Q&A
Q:ubuntu18.04按照wiki上安装步骤执行sudo rosdep init是出现
sudo: rosdep:找不到命令
原因:python-rosdep这个包没有装。
sudo apt-get install python-rosdep
图形化显示
Q&A
Q.安装完ROS之后运行rviz出现以下报错:

原因:缺少图形化显示
win10+WSL+安装VcXsrv Windows X Server
下载Xlaunch:
https://zhuanlan.zhihu.com/p/128507562

一路向next

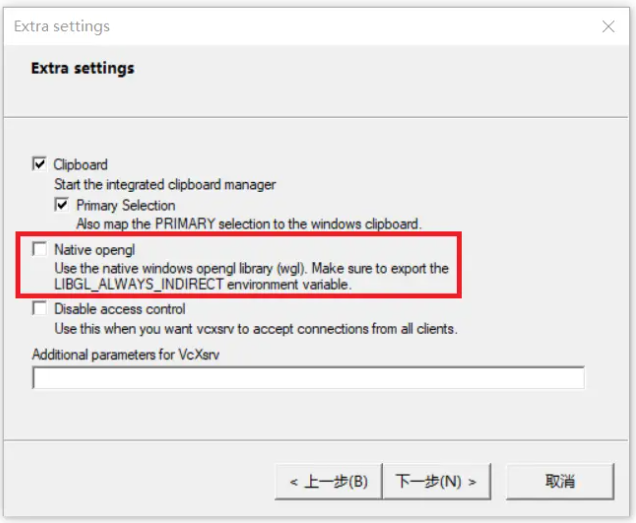
重启Xlaunch,并取消Native opengl的选择:
安装完成后,需要在WSL里面config一下:
bash
sudo vim ~/.bashrc在末尾添加以下内容
export DISPLAY=:0.0
export LIBGL_ALWAYS_INDIRECT=
export LIBGL_ALWASY_SOFTWARE=1
添加 LIBGL_ALWAYS_INDIRECT= 这个很奇怪的操作是我在这个论坛讨论上看到的,很玄学的问题,不加上去就不能正常显示ROS的图形化输出。
完成后ESC再输入:wq保存退出,然后记住 source:
bash
source ~/.bashrc使用rviz之前先开启XLanch
Display number : 0

取消Native opengl的选择

测试
sudo apt install x11-apps -y && xeyes

rviz

安装docker
下载docker for windows安装包

大概五百兆,先忙其他的。
wsl安装docker
使用wget从 https://get.docker.com 获取并运行 Docker 安装脚本,然后采用 Shell 中管道(pipe)的方式来执行这个脚本。
wget -qO- https://get.docker.com/ | sh
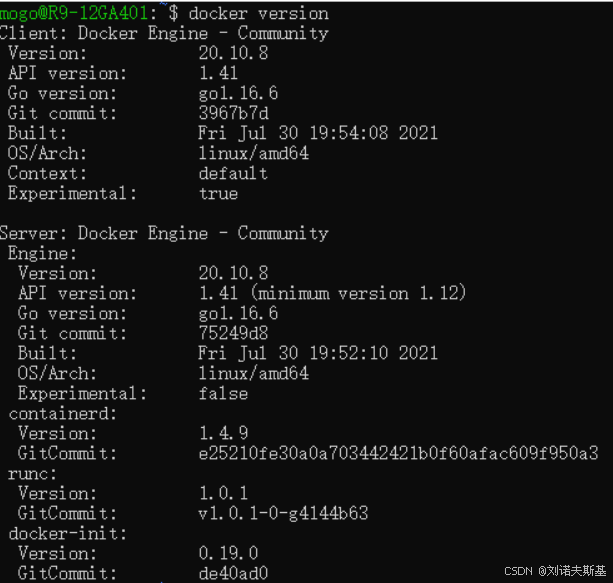
正常通过该指令已经可以使用了,但是由于是WSL,故查看版本现象是:
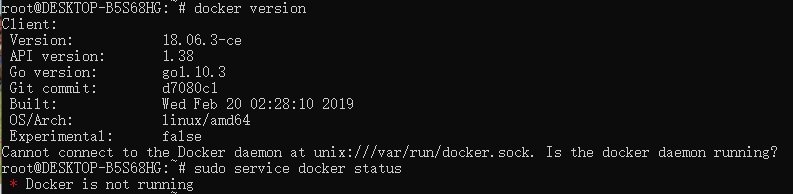
因此有了先前的下载docker for windows。
安装docker for windows
安装
安装很简单,选择下载好的exe,下一步到结束即可,桌面会出现以下图标即可;
Q&A
Q1:Typer-V的错误
Typer-V如果没有开启,启动软件的时候会报错,这里开启,重启电脑即可

Q2:Cpu虚拟化
在任务管理器中查看:

配置docker for windows
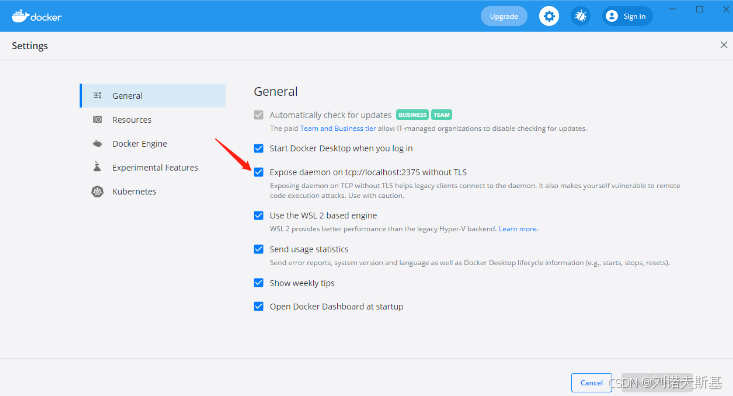
开启2375端口对外提供服务
右键小鲸鱼 > settings > General,勾选上以下选项
WSL配置及刷新环境变量
echo "export DOCKER_HOST='tcp://0.0.0.0:2375'" >> ~/.bashrc
source ~/.bashrc再次查看版本
首先确定已开启如下图的功能:

报错如图所示:
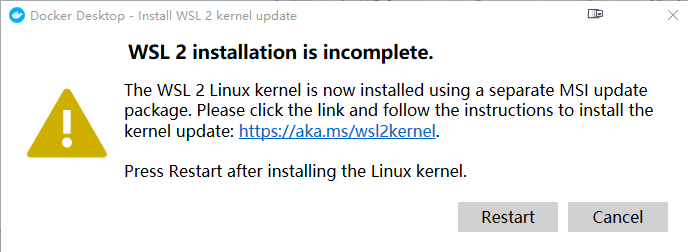
A4:根据报错提示,猜测可能是我们使用的wsl2版本老了,需要我们自己手动更新一下,我们根据提示去微软官网下载最新版的wsl2安装后即可正常打开。
更新包下载链接:https://wslstorestorage.blob.core.windows.net/wslblob/wsl_update_x64.msi
加载镜像
1.Copy tar 到 用户目录
2.加载Image
docker load -i xxx.tar3.查看image
docker images参考资料
WSL (Ubuntu 18.04 LTS) 安装ROS,可运行Rviz和Gazebo
https://www.it610.com/article/1282805517810417664.htm
问题解决方案记录
https://zhuanlan.zhihu.com/p/335524684
Win10 Terminal + WSL 安装配置指南,精致开发体验
https://zhuanlan.zhihu.com/p/273237897
编写ROS的第一个程序hello world(重点)
https://www.cnblogs.com/IT-cute/p/13232409.html
window10下子系统ubuntu安装Docker
https://blog.csdn.net/lupengfei1009/article/details/94637398
Docker for windows 7 - 加载 docker images
https://www.cnblogs.com/atuotuo/p/6830124.html