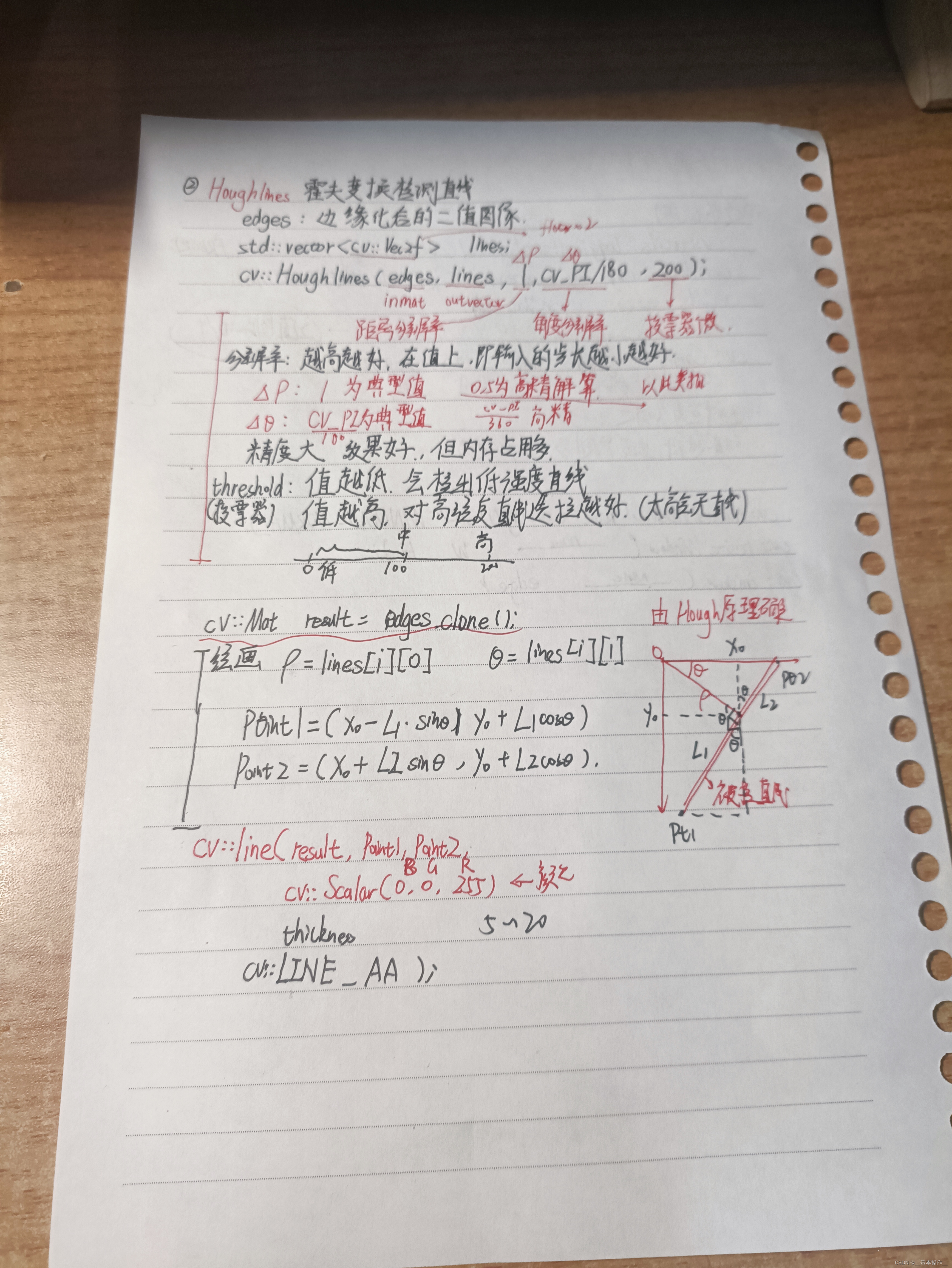
opencv中集成了很多好用的函数,比如霍夫变换检测直线的函数,当然,考虑到看我文章的人水平,我这里只讲讲如何使用这个函数,和怎么调节其中的参数
先把运行效果PO出来吧

cpp
#include "CV_ERROR.h"
#include "MCV_funs.hpp"
#include <opencv2/opencv.hpp>
#include <iostream>
int main() {
cv::utils::logging::setLogLevel(cv::utils::logging::LOG_LEVEL_ERROR);
// 读取PNG图像
//cv::Mat image = cv::imread("lines.png", cv::IMREAD_COLOR);
cv::Mat image = cv::imread("PIC.jpg", cv::IMREAD_COLOR);
if (image.empty()) {
std::cerr << "无法读取图像文件" << std::endl;
return -1;
}
showimageWin(image);
// 转换为灰度图像
cv::Mat gray;
cv::cvtColor(image, gray, cv::COLOR_BGR2GRAY);
// 应用边缘检测(Canny)
cv::Mat edges;
cv::Canny(gray, edges, 150, 200, 3);
showimageWin(edges);
// 使用霍夫变换检测直线
std::vector<cv::Vec2f> lines;
cv::HoughLines(edges, lines, 0.5, CV_PI / 360, 200);
// 在原图上绘制检测到的直线
cv::Mat result = image.clone();
for (size_t i = 0; i < lines.size(); i++) {
float rho = lines[i][0], theta = lines[i][1];
cv::Point pt1, pt2;
double a = cos(theta), b = sin(theta);
double x0 = a * rho, y0 = b * rho;
pt1.x = cvRound(x0 + 1000 * (-b));
pt1.y = cvRound(y0 + 1000 * (a));
pt2.x = cvRound(x0 - 1000 * (-b));
pt2.y = cvRound(y0 - 1000 * (a));
cv::line(result, pt1, pt2, cv::Scalar(0, 255, 0), 15, cv::LINE_AA);
}
// 显示结果图像
showimageWin(result);
cv::waitKey();
return 0;
}下面是原理类的讲解,本鼠懒得重复做笔记了,直接PO在下面吧ψ(`∇´)ψ