版本:Unity2019.4.0f1
PackageManager下载Burst插件(1.2.3版本)

利用如下代码,生成一个Texture3D资源,它只能脚本生成,是一个32*32*32的立方体,导出路径记得改下,不然报错。
cs
using UnityEditor;
using UnityEngine;
public class ExampleEditorScript
{
[MenuItem("CreateExamples/3DTexture")]
static void CreateTexture3D()
{
// 配置纹理
int size = 32;
TextureFormat format = TextureFormat.RGBA32;
TextureWrapMode wrapMode = TextureWrapMode.Clamp;
// 创建纹理并应用配置
Texture3D texture = new Texture3D(size, size, size, format, false);
texture.wrapMode = wrapMode;
// 创建 3 维数组以存储颜色数据
Color[] colors = new Color[size * size * size];
// 填充数组,使纹理的 x、y 和 z 值映射为红色、蓝色和绿色
float inverseResolution = 1.0f / (size - 1.0f);
for (int z = 0; z < size; z++)
{
int zOffset = z * size * size;
for (int y = 0; y < size; y++)
{
int yOffset = y * size;
for (int x = 0; x < size; x++)
{
colors[x + yOffset + zOffset] = new Color(x * inverseResolution,
y * inverseResolution, z * inverseResolution, 1.0f);
}
}
}
// 将颜色值复制到纹理
texture.SetPixels(colors);
// 将更改应用到纹理,然后将更新的纹理上传到 GPU
texture.Apply();
// 将纹理保存到 Unity 项目
AssetDatabase.CreateAsset(texture, "Assets/JobsDemo/Example3DTexture.asset");
}
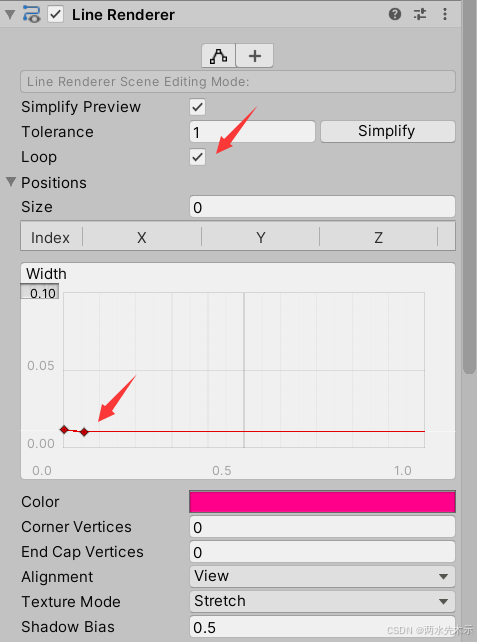
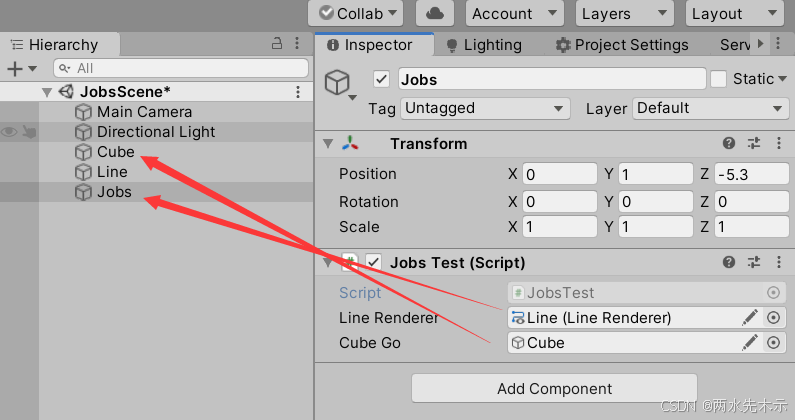
}场景上创建一个Cube和LineRenderer(注意Line的位置要设置到(0,0,0) 如下图 摄像机保持位置(0,1,-10))
新建一个材质球挂到Cube上,Shader代码如下:
cs
Shader "Unlit/VolumeShader"
{
Properties
{
_MainTex("Texture", 3D) = "white" {}
_Alpha("Alpha", float) = 0.02
_StepSize("Step Size", float) = 0.01
}
SubShader
{
Tags { "Queue" = "Transparent" "RenderType" = "Transparent" }
Blend One OneMinusSrcAlpha
LOD 100
Pass
{
CGPROGRAM
#pragma vertex vert
#pragma fragment frag
#include "UnityCG.cginc"
// 最大光线追踪样本数
#define MAX_STEP_COUNT 128
// 允许的浮点数误差
#define EPSILON 0.00001f
struct appdata
{
float4 vertex : POSITION;
};
struct v2f
{
float4 vertex : SV_POSITION;
float3 objectVertex : TEXCOORD0;
float3 vectorToSurface : TEXCOORD1;
};
sampler3D _MainTex;
float4 _MainTex_ST;
float _Alpha;
float _StepSize;
v2f vert(appdata v)
{
v2f o;
// 对象空间中的顶点将成为光线追踪的起点
o.objectVertex = v.vertex;
// 计算世界空间中从摄像机到顶点的矢量
float3 worldVertex = mul(unity_ObjectToWorld, v.vertex).xyz;
o.vectorToSurface = worldVertex - _WorldSpaceCameraPos;
o.vertex = UnityObjectToClipPos(v.vertex);
return o;
}
float4 BlendUnder(float4 color, float4 newColor)
{
color.rgb += (1.0 - color.a) * newColor.a * newColor.rgb;
color.a += (1.0 - color.a) * newColor.a;
return color;
}
fixed4 frag(v2f i) : SV_Target
{
// 开始在对象的正面进行光线追踪
float3 rayOrigin = i.objectVertex;
// 使用摄像机到对象表面的矢量获取射线方向
float3 rayDirection = mul(unity_WorldToObject, float4(normalize(i.vectorToSurface), 1));
float4 color = float4(0, 0, 0, 0);
float3 samplePosition = rayOrigin;
// 穿过对象空间进行光线追踪
for (int i = 0; i < MAX_STEP_COUNT; i++)
{
// 仅在单位立方体边界内累积颜色
if (max(abs(samplePosition.x), max(abs(samplePosition.y), abs(samplePosition.z))) < 0.5f + EPSILON)
{
float4 sampledColor = tex3D(_MainTex, samplePosition + float3(0.5f, 0.5f, 0.5f));
sampledColor.a *= _Alpha;
color = BlendUnder(color, sampledColor);
samplePosition += rayDirection * _StepSize;
}
}
return color;
}
ENDCG
}
}
}新建一个空物体Jobs,挂载脚本JobsTest.cs
cs
using System;
using System.Collections;
using System.Collections.Generic;
using Unity.Burst;
using Unity.Collections;
using Unity.Collections.LowLevel.Unsafe;
using Unity.Jobs;
using UnityEngine;
public class JobsTest : MonoBehaviour
{
private int width, height, depth;
public LineRenderer lineRenderer;
public GameObject cubeGo;
private Transform cubeTrans;
private Texture3D _Tex3D;
private Color[] colors;
private Color[] cacheColor;
NativeArray<Color> nativeColors;
NativeArray<ColorData> nativeColorDatas;
MyJob myJob = new MyJob();
private void Awake()
{
Material mat = cubeGo.GetComponent<MeshRenderer>().sharedMaterial;
_Tex3D = (Texture3D)mat.GetTexture("_MainTex");
width = _Tex3D.width;
height = _Tex3D.height;
depth = _Tex3D.depth;
colors = _Tex3D.GetPixels();
cacheColor = _Tex3D.GetPixels();
cubeTrans = cubeGo.transform;
Debug.Log(colors.Length);
}
private void OnEnable()
{
lineRenderer.positionCount = 1;
_Tex3D.SetPixels(cacheColor);
_Tex3D.Apply();
nativeColors = new NativeArray<Color>(colors.Length, Allocator.Persistent);
nativeColorDatas = new NativeArray<ColorData>(colors.Length, Allocator.Persistent);
myJob.width = width;
myJob.height = height;
myJob.depth = depth;
myJob.colors = nativeColors;
myJob.colorDatas = nativeColorDatas;
for (int z = 0; z < depth; z++)
{
for (int y = 0; y < height; y++)
{
for (int x = 0; x < width; x++)
{
int i = z * (width * height) + y * width + x;
nativeColors[i] = colors[i];
ColorData colorData = new ColorData();
colorData.x = x;
colorData.y = y;
colorData.z = z;
nativeColorDatas[i] = colorData;
}
}
}
}
private void OnDisable()
{
_Tex3D.SetPixels(cacheColor);
_Tex3D.Apply();
nativeColorDatas.Dispose();
nativeColors.Dispose();
}
// Update is called once per frame
void Update()
{
if (Input.GetMouseButtonDown(0))
{
Vector3 screenPos = Input.mousePosition;
screenPos.z = 1;
lineRenderer.SetPosition(lineRenderer.positionCount - 1, Camera.main.ScreenToWorldPoint(screenPos));
if (lineRenderer.positionCount == 3)
{
Calculate();
lineRenderer.positionCount = 1;
}
else
{
lineRenderer.positionCount++;
}
}
else
{
if (lineRenderer.positionCount > 1)
{
Vector3 screenPos = Input.mousePosition;
screenPos.z = 1;
lineRenderer.SetPosition(lineRenderer.positionCount - 1, Camera.main.ScreenToWorldPoint(screenPos));
}
}
}
private void Calculate()
{
float startTime = Time.realtimeSinceStartup;
//模型坐标
myJob.p1 = cubeTrans.InverseTransformPoint(lineRenderer.GetPosition(0));
myJob.p2 = cubeTrans.InverseTransformPoint(lineRenderer.GetPosition(1));
myJob.p3 = cubeTrans.InverseTransformPoint(lineRenderer.GetPosition(2));
myJob.object2World = cubeTrans.localToWorldMatrix;
myJob.world2Camera = Camera.main.worldToCameraMatrix;
myJob.camera2Clip = Camera.main.projectionMatrix;
JobHandle jobHandle = default;
jobHandle = myJob.ScheduleParallel(colors.Length, 64, jobHandle);
jobHandle.Complete();
_Tex3D.SetPixels(nativeColors.ToArray());
_Tex3D.Apply();
Debug.Log((Time.realtimeSinceStartup - startTime) * 1000 + "ms");
}
}
[BurstCompile]
public struct MyJob : IJobFor
{
//[NativeDisableContainerSafetyRestriction]
public NativeArray<Color> colors;
//[NativeDisableContainerSafetyRestriction] //发现jobs日志有 out of length报错可用此特性忽略
public NativeArray<ColorData> colorDatas;
public Vector3 p1, p2, p3;
public int width, height, depth;
public Matrix4x4 object2World;
public Matrix4x4 world2Camera;
public Matrix4x4 camera2Clip;
public void Execute(int index)
{
if (colors[index] == Color.clear)
{
return;
}
Vector3 localPoint = new Vector3(colorDatas[index].x / (width * 1.0f), colorDatas[index].y / (height * 1.0f), colorDatas[index].z / (depth * 1.0f)) - (Vector3.one * 0.5f);
Vector2 screenPoint = Local2Screen(localPoint);
Vector2 screenP1 = Local2Screen(p1);
Vector2 screenP2 = Local2Screen(p2);
Vector2 screenP3 = Local2Screen(p3);
bool isInside = IsPointInTriangle(screenPoint, screenP1, screenP2, screenP3);
if (isInside)
{
colors[index] = Color.clear;
}
}
//2个二维向量行列式值,可理解为求出了2个二维向量构成的面的法线z值
private float Cross(Vector2 a, Vector2 b, Vector2 p)
{
return (b.x - a.x) * (p.y - a.y) - (b.y - a.y) * (p.x - a.x);
}
private bool IsPointInTriangle(Vector2 p, Vector2 a, Vector2 b, Vector2 c)
{
float signOfTrig = Cross(a, b, c);
float signOfAB = Cross(a, b, p);
float signOfCA = Cross(c, a, p);
float signOfBC = Cross(b, c, p);
bool d1 = (signOfAB * signOfTrig > 0);
bool d2 = (signOfCA * signOfTrig > 0);
bool d3 = (signOfBC * signOfTrig > 0);
return d1 && d2 && d3;
//方法2:
//Vector3 pa = a - p;
//Vector3 pb = b - p;
//Vector3 pc = c - p;
//分别进行3次,求其中2个向量构成的三角面的法线;
//Vector3 pab = Vector3.Cross(pa, pb);
//Vector3 pbc = Vector3.Cross(pb, pc);
//Vector3 pca = Vector3.Cross(pc, pa);
//分别进行3次,求其中2个法线构成的点积(夹角)>0代表两条法线方向相同
//float z1 = Vector3.Dot(pab, pbc);
//float z2 = Vector3.Dot(pab, pca);
//float z3 = Vector3.Dot(pbc, pca);
//若3条法线之间的朝向都是相同的,说明p点在<a,b,c>三角形内
//return z1 > 0 && z2 > 0 && z3 > 0;
}
private Vector2 Local2Screen(Vector3 localPos)
{
Vector3 worldPos = object2World.MultiplyPoint(localPos);
Vector3 cameraPos = world2Camera.MultiplyPoint(worldPos);
Vector4 clipPos = camera2Clip * new Vector4(cameraPos.x, cameraPos.y, cameraPos.z, 1.0f);
if (clipPos.w != 0)
{
clipPos = clipPos / clipPos.w;
}
float screenX = (clipPos.x + 1) / 2f * 1920f;
float screenY = (clipPos.y + 1) / 2f * 1080f;
return new Vector2(screenX, screenY);
}
}
public struct ColorData
{
public float x, y, z;
}项目资源:
耗时如下: