主要学习如何在Linux开发板点亮屏,以及modetest命令的实现。
很多人踩坑,我也是一样。关键是踩坑后还是实现不了,这样的人确实很多,从群里可以知道。也许其他人没有遇到这个问题,我想是他运气好。
1、修改设备树
1)、打开"stm32mp15-pinctrl.dtsi",找到"ltdc_pins_b"节点和"ltdc_pins_sleep_b"节点,如下:
ltdc_pins_b: ltdc-b-0 {
pins {
pinmux = <STM32_PINMUX('I', 14, AF14)>, /* LCD_CLK */
<STM32_PINMUX('I', 12, AF14)>, /* LCD_HSYNC */
<STM32_PINMUX('I', 13, AF14)>, /* LCD_VSYNC */
<STM32_PINMUX('K', 7, AF14)>, /* LCD_DE */
<STM32_PINMUX('I', 15, AF14)>, /* LCD_R0 */
<STM32_PINMUX('J', 0, AF14)>, /* LCD_R1 */
<STM32_PINMUX('J', 1, AF14)>, /* LCD_R2 */
<STM32_PINMUX('J', 2, AF14)>, /* LCD_R3 */
<STM32_PINMUX('J', 3, AF14)>, /* LCD_R4 */
<STM32_PINMUX('J', 4, AF14)>, /* LCD_R5 */
<STM32_PINMUX('J', 5, AF14)>, /* LCD_R6 */
<STM32_PINMUX('J', 6, AF14)>, /* LCD_R7 */
<STM32_PINMUX('J', 7, AF14)>, /* LCD_G0 */
<STM32_PINMUX('J', 8, AF14)>, /* LCD_G1 */
<STM32_PINMUX('J', 9, AF14)>, /* LCD_G2 */
<STM32_PINMUX('J', 10, AF14)>, /* LCD_G3 */
<STM32_PINMUX('J', 11, AF14)>, /* LCD_G4 */
<STM32_PINMUX('K', 0, AF14)>, /* LCD_G5 */
<STM32_PINMUX('K', 1, AF14)>, /* LCD_G6 */
<STM32_PINMUX('K', 2, AF14)>, /* LCD_G7 */
<STM32_PINMUX('J', 12, AF14)>, /* LCD_B0 */
<STM32_PINMUX('J', 13, AF14)>, /* LCD_B1 */
<STM32_PINMUX('J', 14, AF14)>, /* LCD_B2 */
<STM32_PINMUX('J', 15, AF14)>, /* LCD_B3 */
<STM32_PINMUX('K', 3, AF14)>, /* LCD_B4 */
<STM32_PINMUX('K', 4, AF14)>, /* LCD_B5 */
<STM32_PINMUX('K', 5, AF14)>, /* LCD_B6 */
<STM32_PINMUX('K', 6, AF14)>; /* LCD_B7 */
bias-disable;/*禁止使用内部偏置电压*/
drive-push-pull;/*设置引脚为推挽输出*/
slew-rate = <1>;/*设置引脚的速度为1档,0最慢,3 最高*/
};
ltdc_pins_sleep_b: ltdc-b-1 {/*在sleep模式下RGB LCD的pinmux配置*/
pins {
pinmux = <STM32_PINMUX('I', 14, ANALOG)>, /* LCD_CLK */
<STM32_PINMUX('I', 12, ANALOG)>, /* LCD_HSYNC */
<STM32_PINMUX('I', 13, ANALOG)>, /* LCD_VSYNC */
<STM32_PINMUX('K', 7, ANALOG)>, /* LCD_DE */
<STM32_PINMUX('I', 15, ANALOG)>, /* LCD_R0 */
<STM32_PINMUX('J', 0, ANALOG)>, /* LCD_R1 */
<STM32_PINMUX('J', 1, ANALOG)>, /* LCD_R2 */
<STM32_PINMUX('J', 2, ANALOG)>, /* LCD_R3 */
<STM32_PINMUX('J', 3, ANALOG)>, /* LCD_R4 */
<STM32_PINMUX('J', 4, ANALOG)>, /* LCD_R5 */
<STM32_PINMUX('J', 5, ANALOG)>, /* LCD_R6 */
<STM32_PINMUX('J', 6, ANALOG)>, /* LCD_R7 */
<STM32_PINMUX('J', 7, ANALOG)>, /* LCD_G0 */
<STM32_PINMUX('J', 8, ANALOG)>, /* LCD_G1 */
<STM32_PINMUX('J', 9, ANALOG)>, /* LCD_G2 */
<STM32_PINMUX('J', 10, ANALOG)>, /* LCD_G3 */
<STM32_PINMUX('J', 11, ANALOG)>, /* LCD_G4 */
<STM32_PINMUX('K', 0, ANALOG)>, /* LCD_G5 */
<STM32_PINMUX('K', 1, ANALOG)>, /* LCD_G6 */
<STM32_PINMUX('K', 2, ANALOG)>, /* LCD_G7 */
<STM32_PINMUX('J', 12, ANALOG)>, /* LCD_B0 */
<STM32_PINMUX('J', 13, ANALOG)>, /* LCD_B1 */
<STM32_PINMUX('J', 14, ANALOG)>, /* LCD_B2 */
<STM32_PINMUX('J', 15, ANALOG)>, /* LCD_B3 */
<STM32_PINMUX('K', 3, ANALOG)>, /* LCD_B4 */
<STM32_PINMUX('K', 4, ANALOG)>, /* LCD_B5 */
<STM32_PINMUX('K', 5, ANALOG)>, /* LCD_B6 */
<STM32_PINMUX('K', 6, ANALOG)>; /* LCD_B7 */
};
上面的连接和原理图一致,不用修改。
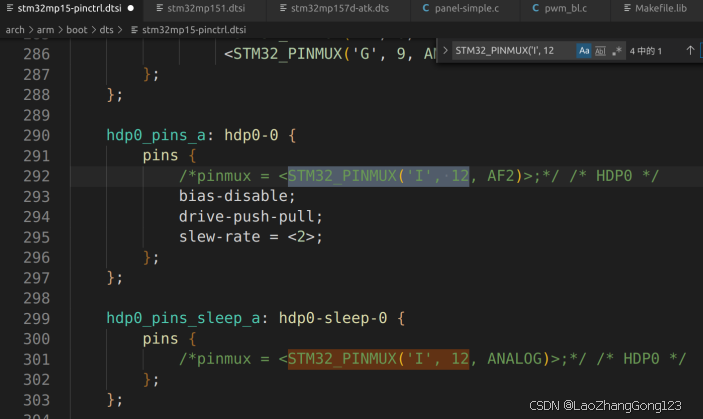
2)、检查是否有被使用的引脚:
PI12被hdp0_pins_a节点占用,要屏蔽,见下图:
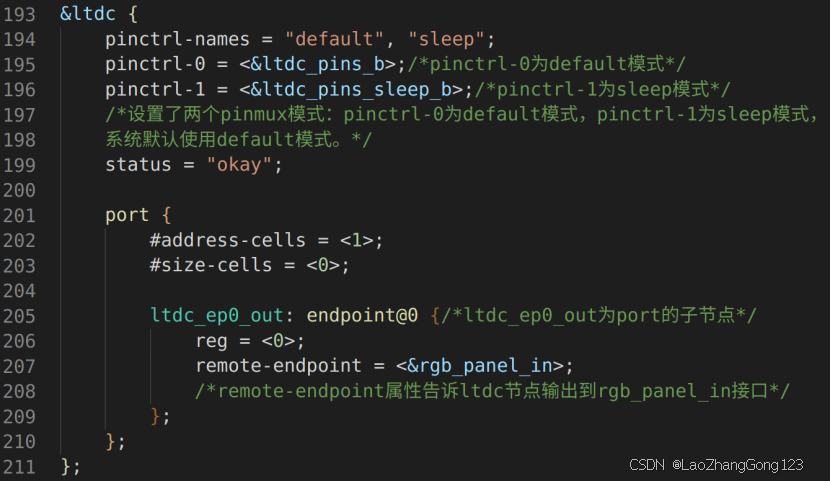
3)、打开"stm32mp157d-atk.dts",添加内容如下(注意:不是在根节点"/"下添加):
ltdc {
pinctrl-names = "default", "sleep";
pinctrl-0 = <<dc_pins_b>;/*pinctrl-0为default模式*/
pinctrl-1 = <<dc_pins_sleep_b>;/*pinctrl-1为sleep模式*/
/*设置了两个pinmux模式:pinctrl-0为default模式,pinctrl-1为sleep模式,
系统默认使用default模式。*/
status = "okay";
port {
#address-cells = <1>;
#size-cells = <0>;
ltdc_ep0_out: endpoint@0 {/*ltdc_ep0_out为port的子节点*/
reg = <0>;
remote-endpoint = <&rgb_panel_in>;
/*remote-endpoint属性告诉ltdc节点输出到rgb_panel_in接口*/
};
};
};
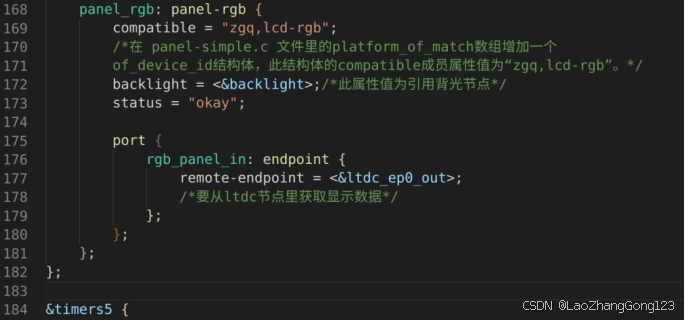
4)、在stm32mp157d-atk.dts文件的根节点"/"下,添加"输出接口"如下所示内容:
panel_rgb: panel-rgb {
compatible = "zgq,lcd-rgb";
/*在 panel-simple.c 文件里的platform_of_match数组增加一个
of_device_id结构体,此结构体的compatible成员属性值为"zgq,lcd-rgb"。*/
backlight = <&backlight>;/*此属性值为引用背光节点*/
status = "okay";
port {
rgb_panel_in: endpoint {
remote-endpoint = <<dc_ep0_out>;
/*要从ltdc节点里获取显示数据*/
};
};
};
2、修改"panel-simple.c"程序
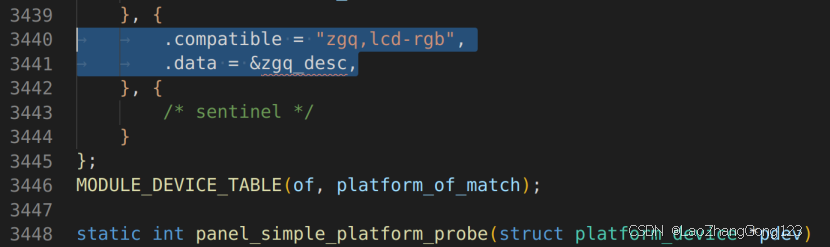
1)、打开"panel-simple.c",修改platform_of_match\[\]数组,添加内容如下:
{
.compatible = "zgq,lcd-rgb",
.data = &zgq_desc,
}
2)、在"panel-simple.c"中添加"zgq_desc"参数。
我用的是ATK4384,4.3寸800*480分辨率,参数如下:
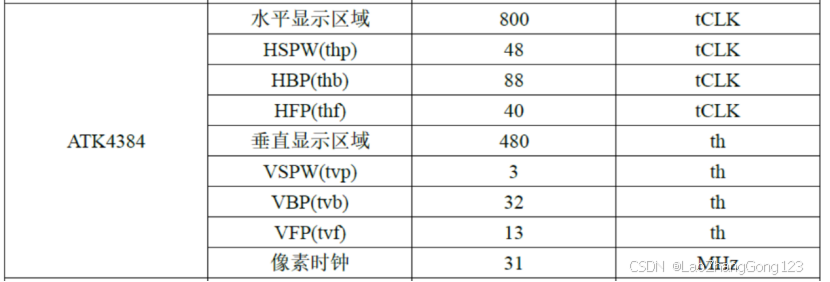
/* LCD屏ATK4384的时序参数信息需要向厂家要:4.3寸800*480分辨率 */
static const struct drm_display_mode ATK4384_mode = {
.clock = 31000, /* LCD像素时钟,单位KHz */
.hdisplay = 800, /* LCD X轴像素个数 */
.hsync_start = 800 + 88, /* LCD X轴+hbp的像素个数 */
.hsync_end = 800 + 88 + 48, /* LCD X轴+hbp+hspw的像素个数 */
.htotal = 800 + 88 + 48 + 40,/* LCD X轴+hbp+hspw+hfp */
.vdisplay = 480, /* LCD Y轴像素个数 */
.vsync_start = 480 + 32, /* LCD Y轴+vbp的像素个数 */
.vsync_end = 480 + 32 + 3, /* LCD Y轴+vbp+vspw的像素个数 */
.vtotal = 480 + 32 + 3 + 13,/* LCD Y轴+vbp+vspw+vfp */
.vrefresh = 60, /* LCD的刷新频率为60HZ */
};
static const struct panel_desc zgq_desc = {
.modes = &ATK4384_mode,
.num_modes = 1,
.bus_format = MEDIA_BUS_FMT_RGB888_1X24,
};
3、再次修改设备树头文件,在"stm32mp15-pinctrl.dtsi"中添加"背光节点"
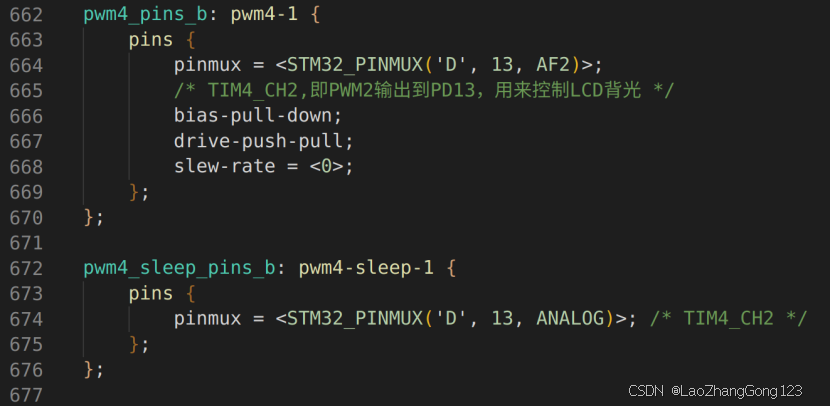
1)、打开"stm32mp15-pinctrl.dtsi",找到"pwm4_pins_b",内容如下:
pwm4_pins_b: pwm4-1 {
pins {
pinmux = <STM32_PINMUX('D', 13, AF2)>; /* TIM4_CH2 */
bias-pull-down;
drive-push-pull;
slew-rate = <0>;
};
};
pwm4_sleep_pins_b: pwm4-sleep-1 {
pins {
pinmux = <STM32_PINMUX('D', 13, ANALOG)>; /* TIM4_CH2 */
};
};
2)、在"stm32mp157d-atk.dts"文件里,添加"&timers4"如下所示内容:
&timers4 {
status = "okay";
/* spare dmas for other usage */
/delete-property/dmas;/*设置此节点不使用DMA*/
/delete-property/dma-names;/*设置此节点不使用DMA*/
pwm4: pwm {/*pwm4是我们为pwm设置的一个别名。*/
pinctrl-0 = <&pwm4_pins_b>;/*设置PWM所使用的IO配置*/
pinctrl-1 = <&pwm4_sleep_pins_b>;/*设置PWM所使用的IO配置*/
pinctrl-names = "default", "sleep";
#pwm-cells = <2>;
status = "okay";
};
};
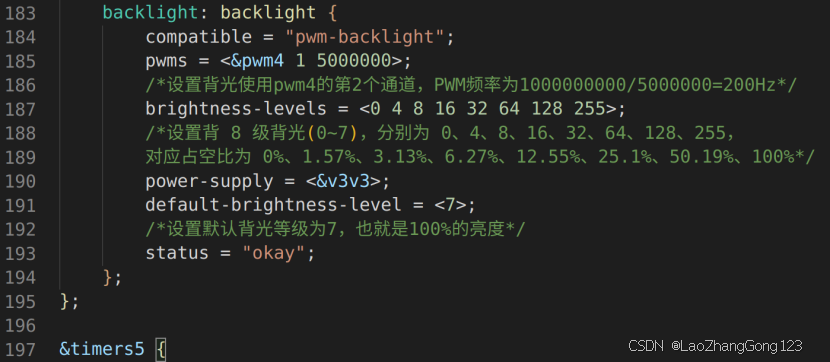
3)、修改设备树文件,在stm32mp157d-atk.dts文件里,在根节点里,添加"backlight"节点:
backlight: backlight {
compatible = "pwm-backlight";
pwms = <&pwm4 1 5000000>;
/*设置背光使用pwm4的第2个通道,PWM频率为1000000000/5000000=200Hz*/
brightness-levels = <0 4 8 16 32 64 128 255>;
/*设置背 8 级背光(0~7),分别为 0、4、8、16、32、64、128、255,
对应占空比为 0%、1.57%、3.13%、6.27%、12.55%、25.1%、50.19%、100%*/
power-supply = <&v3v3>;
default-brightness-level = <7>;
/*设置默认背光等级为7,也就是100%的亮度*/
status = "okay";
};
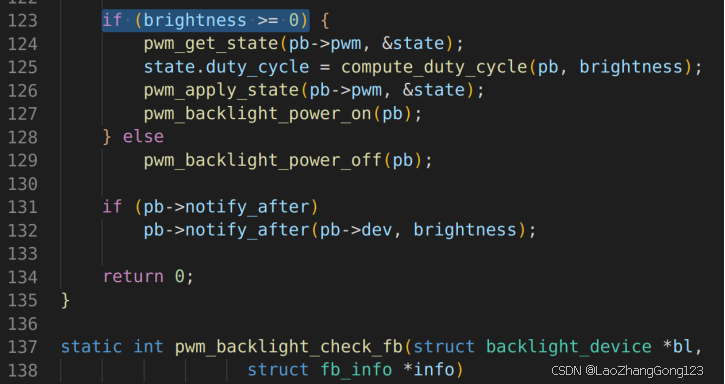
4)、修改"pwm_bl.c"文件
因为背光的驱动代码有点bug,如果设置0级,屏不会灭屏,打开pwm_bl.c文件,将下面的代码修改一下:
if (brightness > 0) {
pwm_get_state(pb->pwm, &state);
state.duty_cycle = compute_duty_cycle(pb, brightness);
pwm_apply_state(pb->pwm, &state);
pwm_backlight_power_on(pb);
}
改成如下:
if (brightness >= 0) {
pwm_get_state(pb->pwm, &state);
state.duty_cycle = compute_duty_cycle(pb, brightness);
pwm_apply_state(pb->pwm, &state);
pwm_backlight_power_on(pb);
}
见下图:
4、配置"Linux内核"
1)、打开终端。
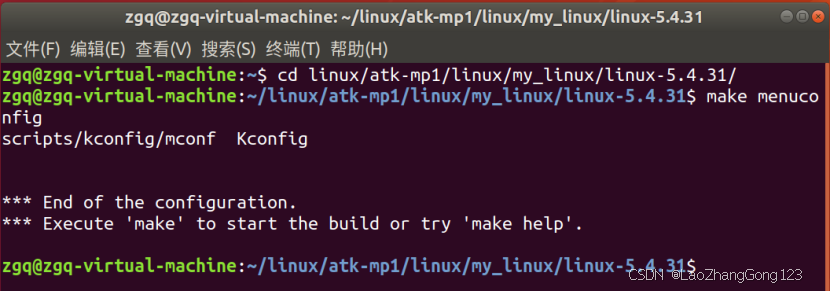
2)、输入"cd linux/atk-mp1/linux/my_linux/linux-5.4.31/回车",切换到"linux/atk-mp1/linux/my_linux/linux-5.4.31/"目录;
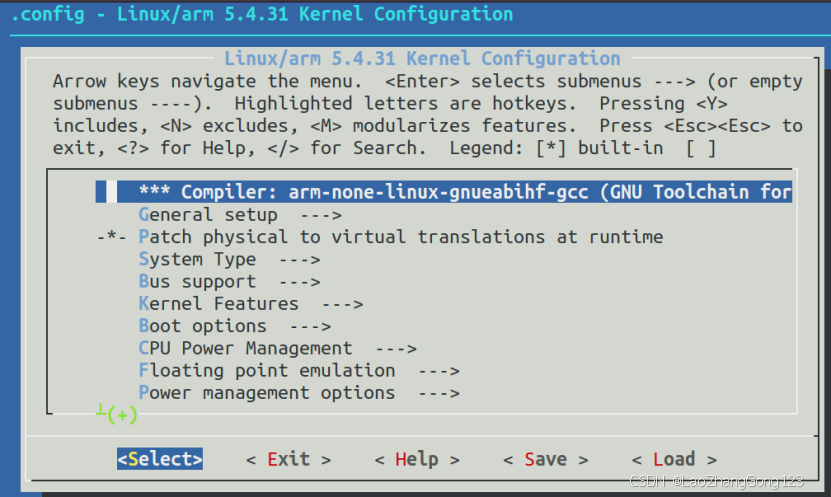
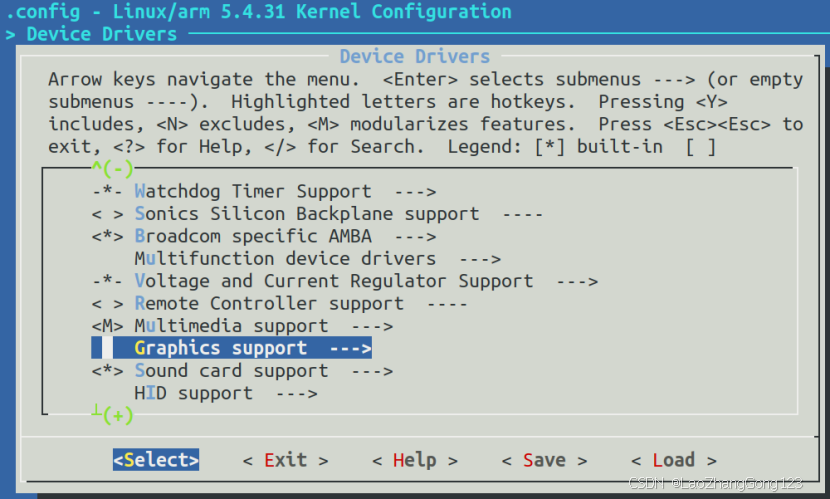
3)、输入"make menuconfig回车",打开linux内核图形化配置界面:
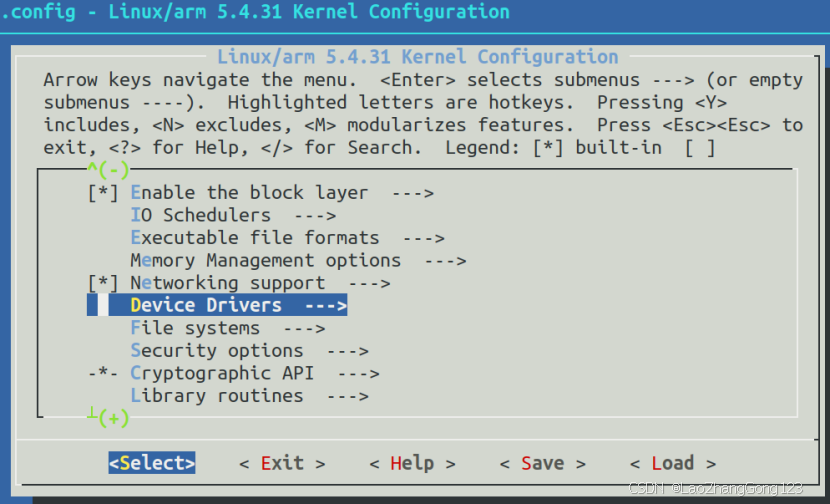
4)、移动"向下光标键"至"Device Drivers",见下图:
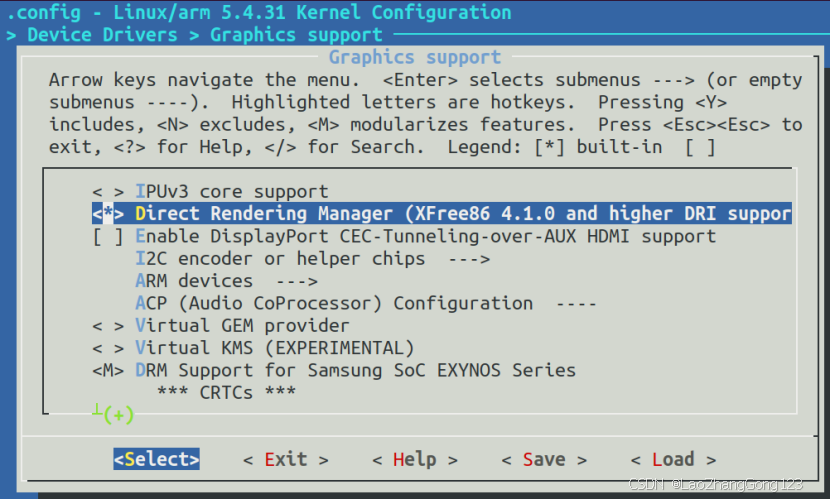
5)、按下"回车键",移动"向下光标键"至"Graphics support",见下图:
6)、按下"回车键",移动"向下光标键"至"Direct Rendering Manager (XFree86 4.1.0 and higher DRI suppor",按"Y键",见下图:
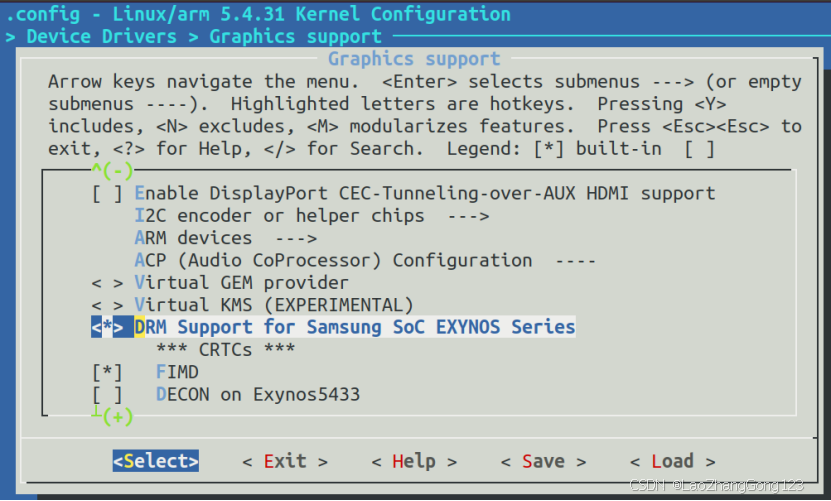
7)、移动"向下光标键"至"DRM Support for Samsung SoC EXYNOS Series",按"Y键",见下图:
8)、先"保存",按"TAB键"至"Save",按下"回车键",得到下面的界面。
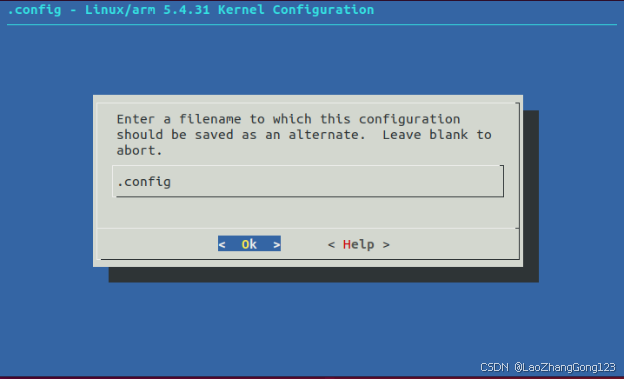
9)、输入"./arch/arm/configs/stm32mp1_atk_defconfig",移动"向下光标键"至"Ok",得到下图:
10)、按"回车键",保存完成。得到下面的界面。
11)、按"回车键",退出保存界面。
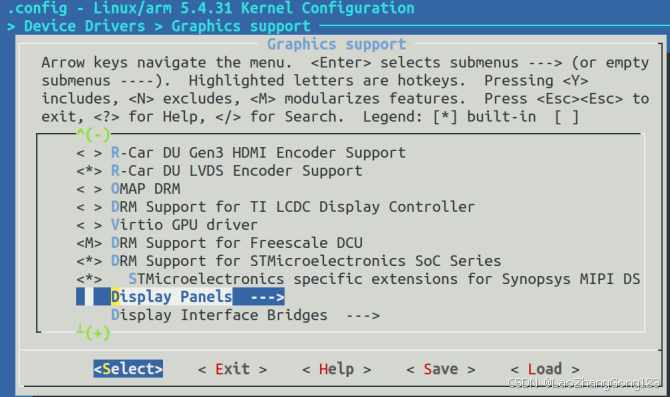
12)、移动"向下光标键"至"Display Panels",见下图:
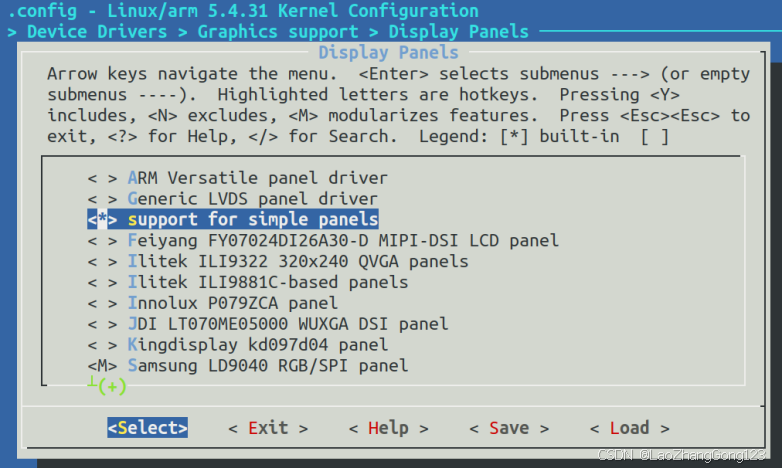
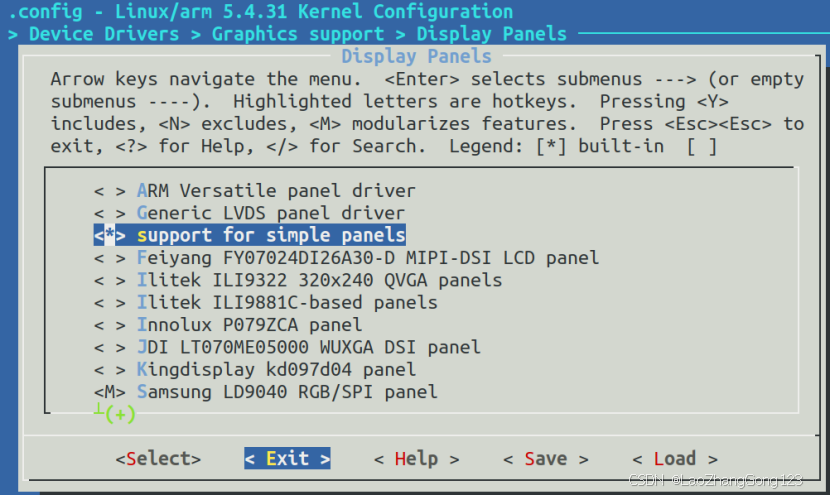
13)、按"回车键",移动"向下光标键"至"support for simple panels",按"Y键",见下图:
14)、按一下"TAB键"至"Exit"。注意:最好也保存一下,防止配置软件有bug。见下图:
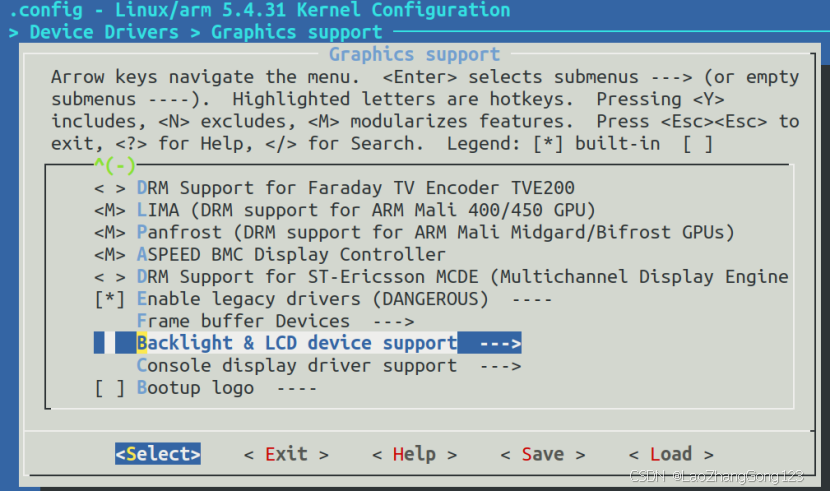
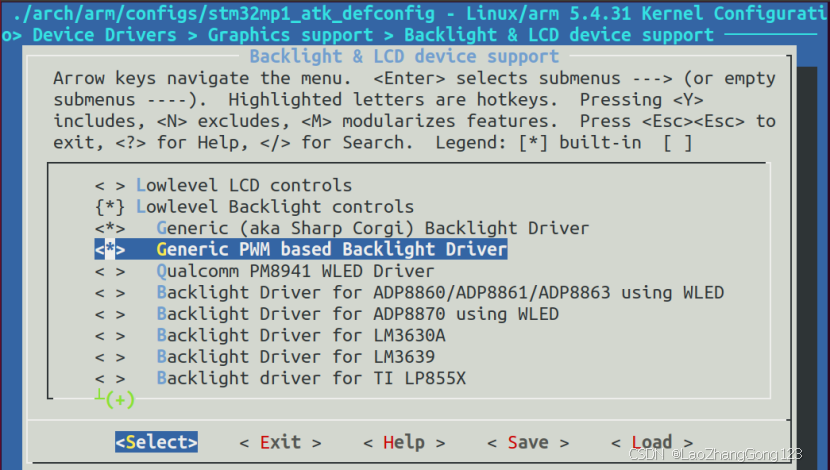
15)、按"回车键",移动"向下光标键"至"Backlight & LCD device support",见下图:
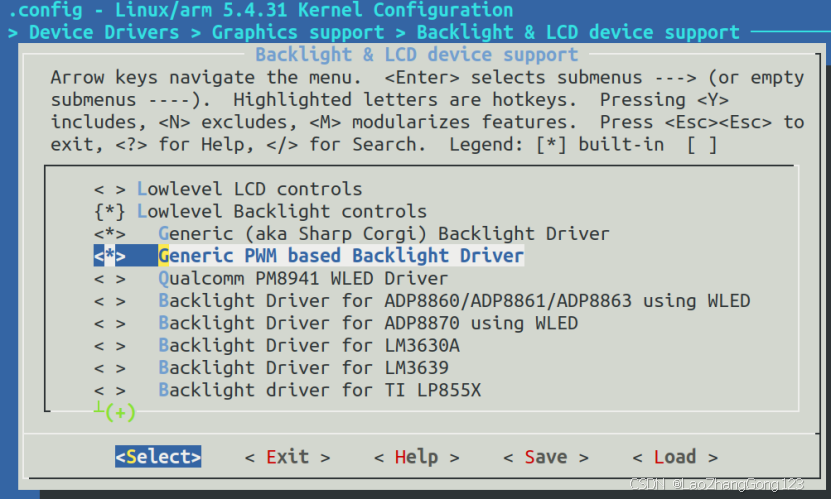
16)、按"回车键",移动"向下光标键"至"Generic PWM based Backlight Driver",按下"Y键",见下图:
17)、按"TAB键"至"Save",按下"回车",得到下面的界面。
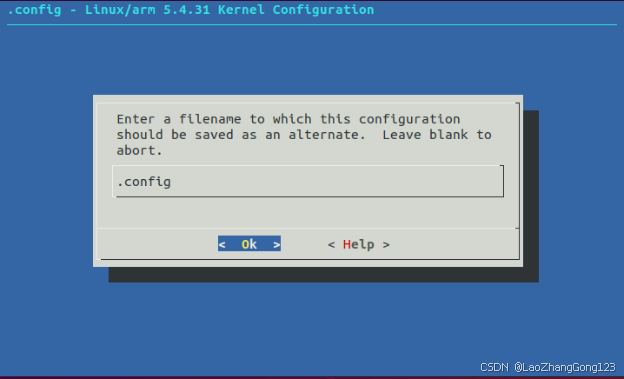
18)、输入"./arch/arm/configs/stm32mp1_atk_defconfig",移动"向下光标键"至"Ok",得到下图:
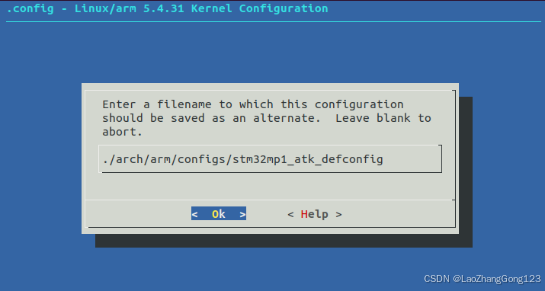
19)、按"回车",保存完成。得到下面的界面。
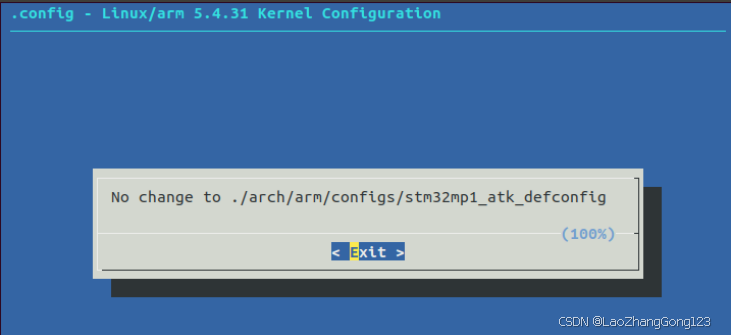
20)、按"回车键",退出。
21)、按8次"ESC键",得到下图:
22)、输入"make stm32mp1_atk_defconfig回车"。
注意:图形化配置完后,要在终端输入"make stm32mp1_atk_defconfig回车",更新".config"这个文件,才叫图形化配置完成,因为参与编译的文件是".config"这个文件。我编译成功,完全是巧合。
5、编译设备树
①在VSCode终端,输入"make uImage dtbs LOADADDR=0XC2000040 -j8回车",执行编译"Image"和"dtbs",并指定装载的起始地址为0XC2000040,j8表示指定采用8线程执行。"make dtbs",用来指定编译设备树。
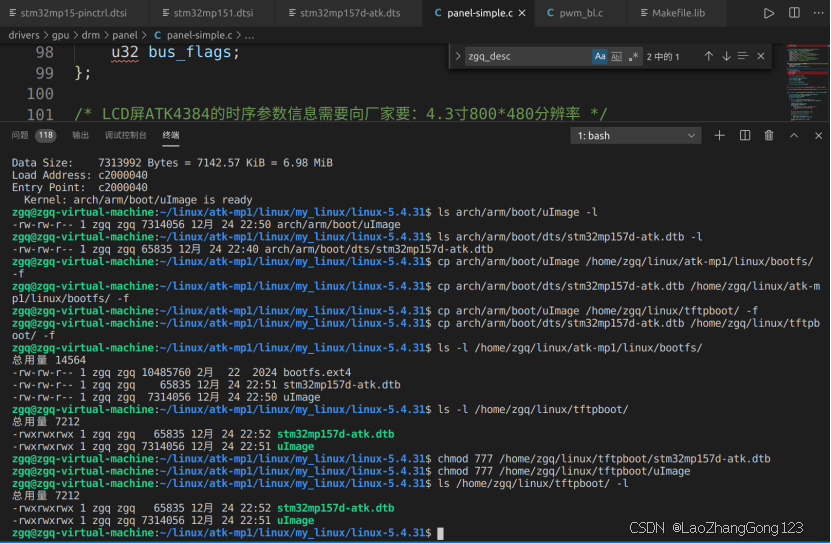
②输入"ls arch/arm/boot/uImage -l"
查看是否生成了新的"uImage"文件
③输入"ls arch/arm/boot/dts/stm32mp157d-atk.dtb -l"
查看是否生成了新的"stm32mp157d-atk.dtb"文件
4)、拷贝输出的文件:
①输入"cp arch/arm/boot/uImage /home/zgq/linux/atk-mp1/linux/bootfs/ -f回车",执行文件拷贝,准备烧录到EMMC;
②输入"cp arch/arm/boot/dts/stm32mp157d-atk.dtb /home/zgq/linux/atk-mp1/linux/bootfs/ -f回车",执行文件拷贝,准备烧录到EMMC
③输入"cp arch/arm/boot/uImage /home/zgq/linux/tftpboot/ -f回车",执行文件拷贝,准备从tftp下载;
④输入"cp arch/arm/boot/dts/stm32mp157d-atk.dtb /home/zgq/linux/tftpboot/ -f回车",执行文件拷贝,准备从tftp下载;
⑤输入"ls -l /home/zgq/linux/atk-mp1/linux/bootfs/回车",查看"/home/zgq/linux/atk-mp1/linux/bootfs/"目录下的所有文件和文件夹
⑥输入"ls -l /home/zgq/linux/tftpboot/回车",查看"/home/zgq/linux/tftpboot/"目录下的所有文件和文件夹
⑦输入"chmod 777 /home/zgq/linux/tftpboot/stm32mp157d-atk.dtb回车"
给"stm32mp157d-atk.dtb"文件赋予可执行权限
⑧输入"chmod 777 /home/zgq/linux/tftpboot/uImage回车" ,给"uImage"文件赋予可执行权限
⑨输入"ls /home/zgq/linux/tftpboot/ -l回车",查看"/home/zgq/linux/tftpboot/"目录下的所有文件和文件夹
6、文件系统使能libdrm库
如果没有libdrm库,是不能调用drm驱动的,所以我们要在文件系统中使能libdrm库。
1)、输入"cd /home/zgq/linux/buildroot/buildroot-2020.02.6回车"
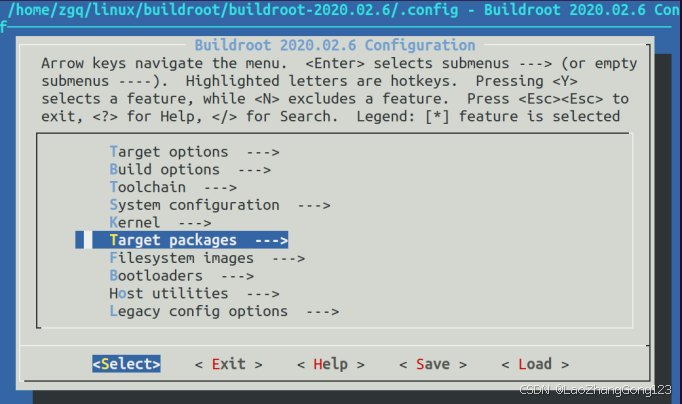
2)、输入"make menuconfig回车",打开"buildroot的图形化配置界面"

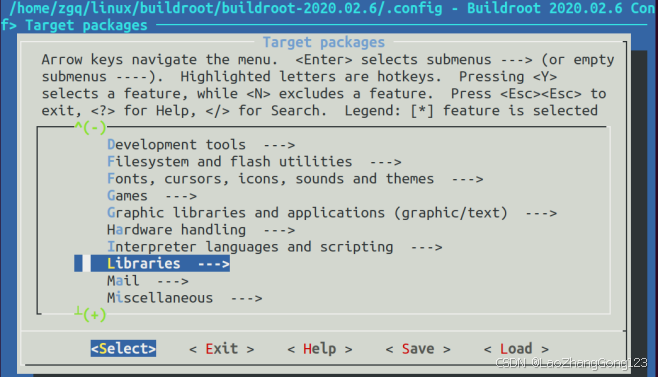
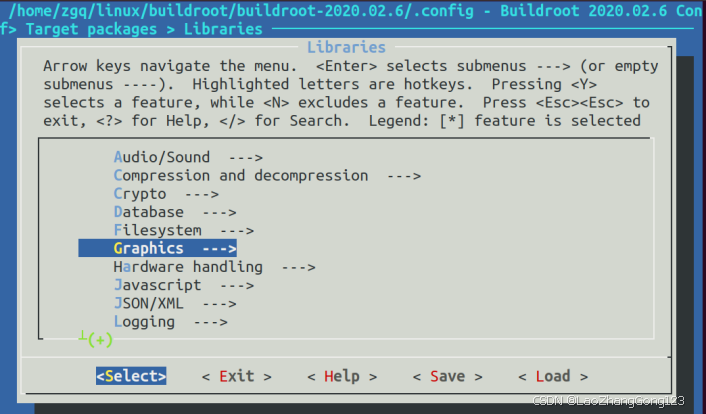
3)、移动"向下光标键"至"Target packages",见下图:
4)、按"回车键",移动"向下光标键"至"Libraries",见下图:
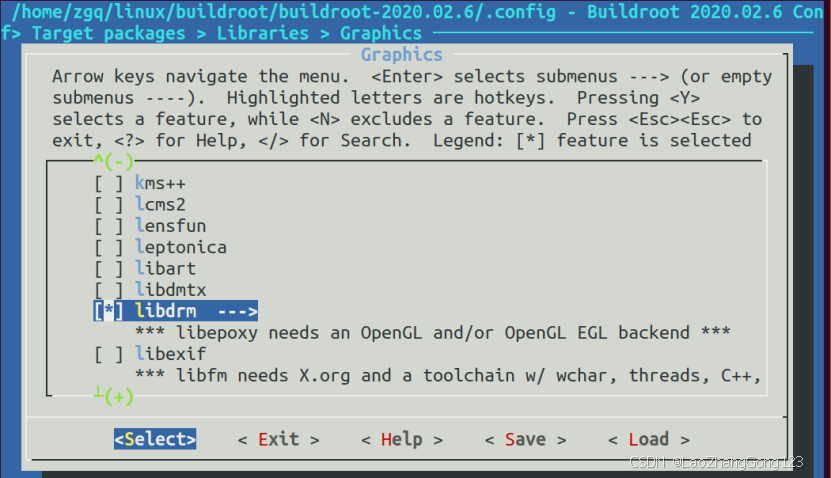
5)、按"回车键",移动"向下光标键"至"Graphics",见下图:
6)、按"回车键",移动"向下光标键"至"libdrm",按下"Y键",见下图:
7)、按"TAB键",移动"向右光标键"至"Save",按"回车键"。
注意:这里必须要先保存,否则一次性保存会失败,我试过了,不要踩坑。
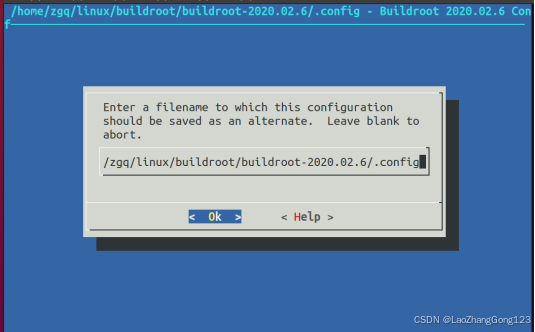
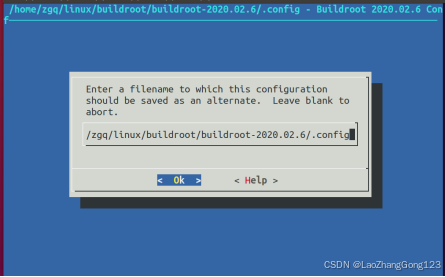
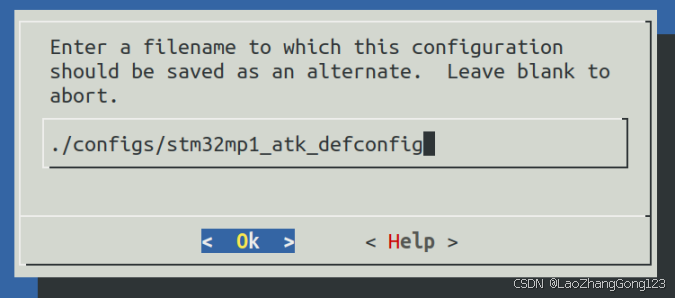
8)、将"/zgq/linux/buildroot/buildroot-2020.02.6/.config"修改为
"./configs/stm32mp1_atk_defconfig",见下图:

9)、移动"向下光标键"至"Ok",按"回车键";按"ESC"
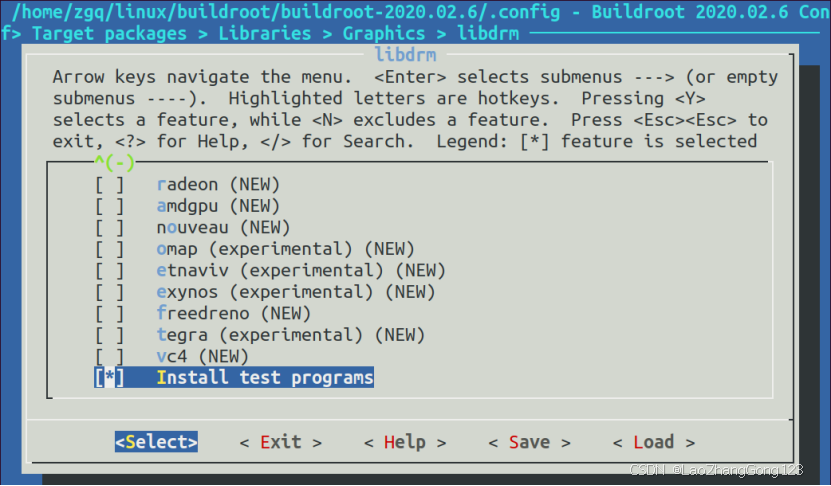
10)、按下"回车键",移动"向下光标键"至"Install test programs",按下"Y键",见下图:
11)、按"TAB键",移动光标至"Save",按"回车键"
12)、将"/zgq/linux/buildroot/buildroot-2020.02.6/.config"修改为
"./configs/stm32mp1_atk_defconfig",见下图:
13)、移动"向下光标键"至"Ok",按"回车键"完成保存;
这里,我们将配置项命名为"stm32mp1_atk_defconfig",以后要重新配置buildroot的话,就可以直接输入"make stm32mp1_atk_defconfig回车"。
15)、按"ESC键"退出,直到出现下图:
16)、输入"make stm32mp1_atk_defconfig回车"

注意:图形化配置完后,要在终端输入"make stm32mp1_atk_defconfig回车",更新".config"这个文件,才叫图形化配置完成,因为参与编译的文件是".config"这个文件。我编译成功,完全是巧合。可以这么理解"stm32mp1_atk_defconfig"好比是缓存,而".config"才是我们要修改的文件。
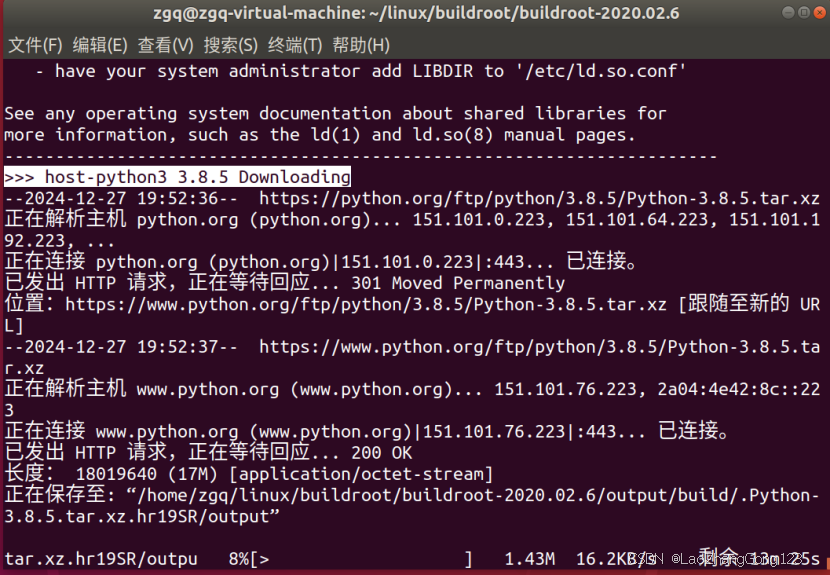
7、编译"buildroot"
1)、在"/home/zgq/linux/buildroot/buildroot-2020.02.6"目录,
输入"make -j8",编译"buildroot",-j8表示采用8线程编译
2)、等待下载"host-python3 3.8.5"见下图:
3)、等待下载"host-python3-setuptools 41.4.0"
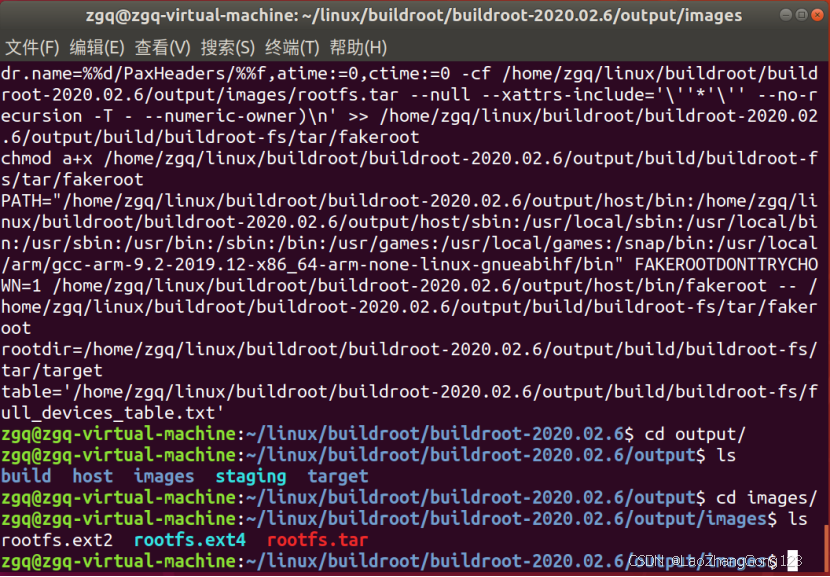
4)、查看编译结果:
输入"cd output/"切换到"output"目录
输入"ls",查看"output"目录下的所有文件和文件夹
输入"cd images/"切换到"images"目录
输入"ls",查看"images"目录下的所有文件和文件夹
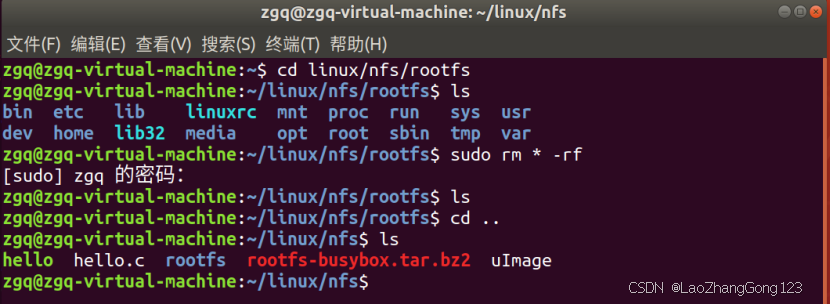
5)、打开第2个终端
输入"cd linux/nfs/rootfs",切换到"linux/nfs/rootfs"目录
输入"ls回车"
输入"sudo rm * -rf回车",删除"rootfs"目录下所有的文件和文件夹,前面已经做了备份
输入"ls回车"
输入"cd ..回车",返回到"nfs"目录
输入"ls回车"
6)、回到第1个打开的终端
输入"cp rootfs.tar /home/zgq/linux/nfs/rootfs回车"
将"/home/zgq/linux/buildroot/buildroot-2020.02.6/output/images"目录下的"rootfs.tar"拷贝到"/home/zgq/linux/nfs/rootfs"目录中
7)、回到第2个打开的终端
输入"cd rootfs/回车"
输入"ls回车"
输入"sudo tar -axvf rootfs.tar",解压
8)、输入"ls回车"
输入"rm rootfs.tar回车",删除压缩包
输入"ls回车"
得到buildroot生成的根文件系统。
8、使用****"buildroot"构建根文件系统**** 。
1)、给开发板上电。
输入"root回车"
输入密码"123456回车"
输入"cd /",切换到根目录
输入"ls",可以执行了
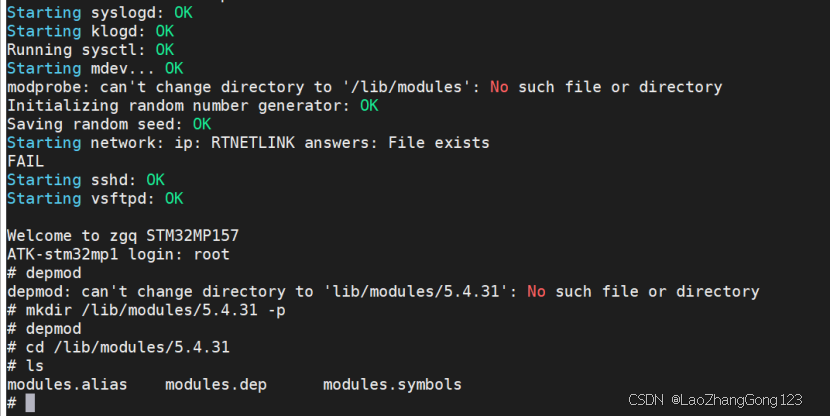
2)、输入"reboot回车"
输入"root回车"
输入"depmod回车",报告"depmod: can't change directory to 'lib/modules/5.4.31': No such file or directory"
输入"mkdir /lib/modules/5.4.31 -p回车"
输入"depmod回车"
输入"cd /lib/modules/5.4.31回车"
输入"ls回车"
9、使用vsftpd搭建FTP服务器
1)、输入"vi /etc/vsftpd.conf回车"
按"ESC键",输入"/local_enable=回车",搜索字符串"local_enable="
,先按下"A",然后移动光标至"#local_enable=YES",删除"#",修改为"local_enable=YES"
按"ESC键",输入"/write_enable=回车",搜索字符串"write_enable="
,先按下"A",然后移动光标至"#write_enable=YES",删除"#",修改为"write_enable=YES"
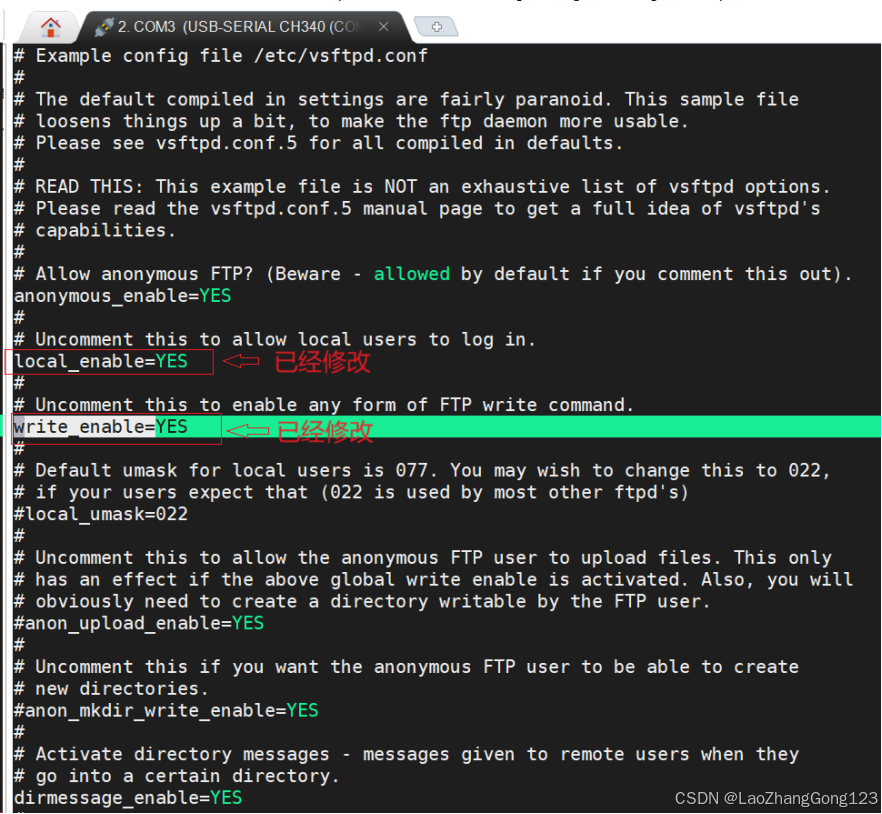
2)、按"ESC键",输入":wq回车",保存退出。
10、测试:使用SSH服务通过网络远程登录开发板
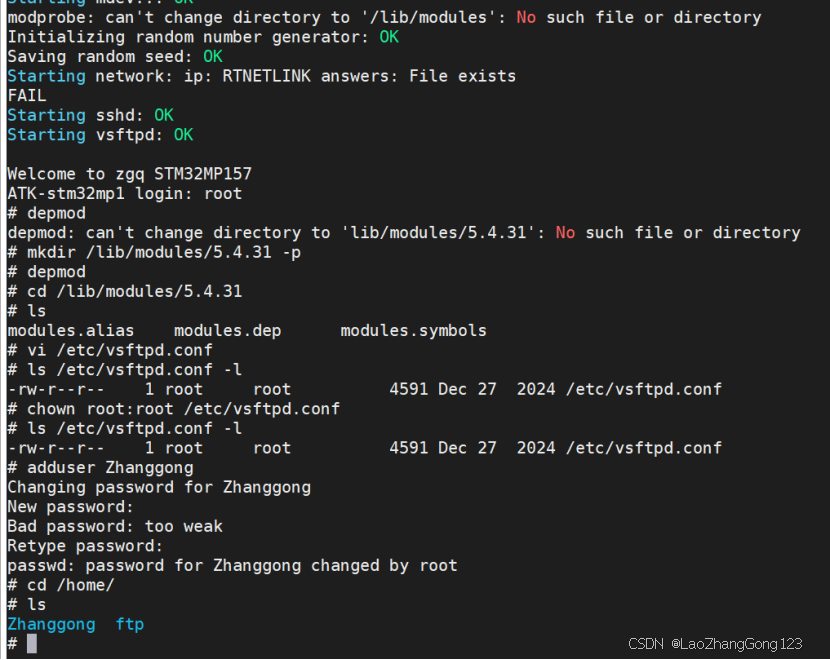
1)、输入"ls /etc/vsftpd.conf -l回车"
报告"-rw-r--r-- 1 sshd sshd 4591 Feb 17 2024 /etc/vsftpd.conf",表示该文件所属用户为"sshd";
输入"chown root:root /etc/vsftpd.conf回车",将/etc/vsftpd.conf修改为"root"用户。
输入"ls /etc/vsftpd.conf -l回车"
报告"-rw-r--r-- 1 root root 4591 Feb 17 2024 /etc/vsftpd.conf",表示该文件所属用户为"root";
2)、输入"adduser Zhanggong回车",使用adduser命令创建开发板用户名为Zhanggong
输入密码"123456"
输入密码"123456"
输入"cd /home/回车"
输入"ls回车"
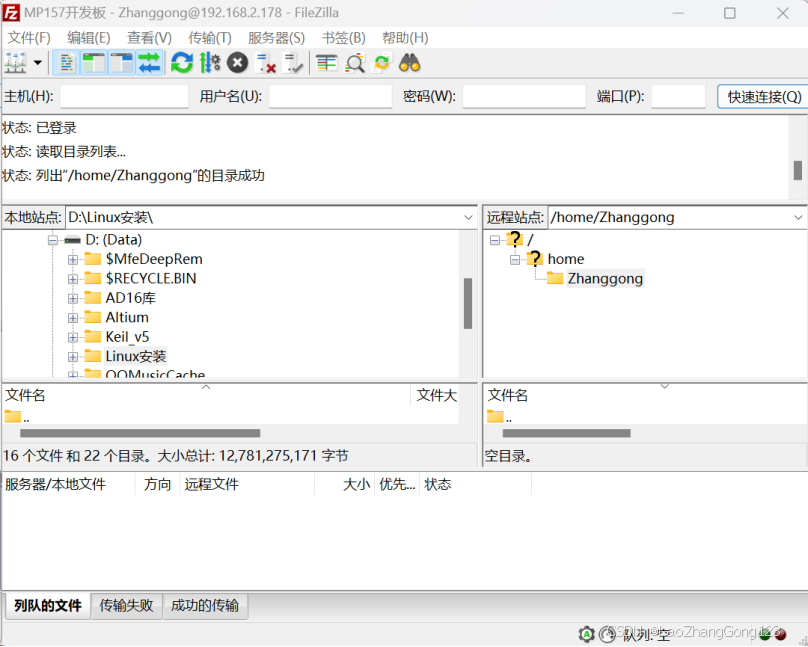
3)、打开"FileZilla"
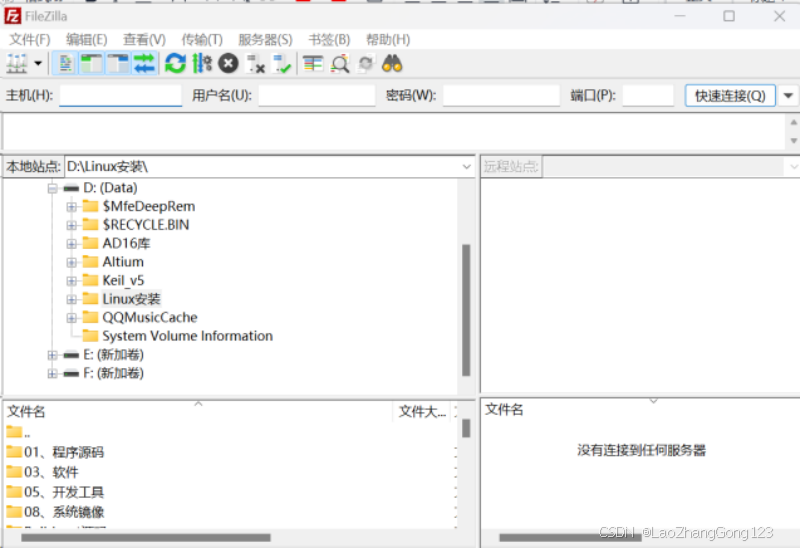
4)、点击"文件",再点击"站点管理器"

5)、点击"新站点",修改为"MP157开发板"
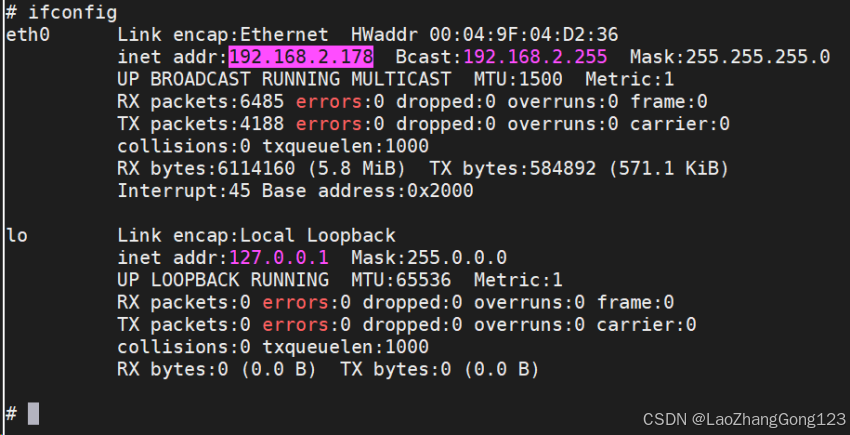
6)、等待开发板启动完成,输入"root回车",输入"ifconfig回车",查询卡发板的IP地址
7)、设置开发板的IP地址,用户名和密码

8)、在串口终端输入"reboot",重启开发板。
9)、等待开发板启动完成,再点击"连接"
10、在串口终端输入"root回车",输入"ps回车"
11)、输入"chown root:root /var/empty回车",将"/var/empty"修改为"root"用户。
输入"reboot回车",重启开发板
12)、等待开发板启动完成后,在串口终端输入"root回车",输入"ps回车"
13)、点击"sesson",点击"SSH",然后按照下图设置开发板:

14)、输入密码"123456"
输入"cd /回车",切换至根目录
输入"ls回车"
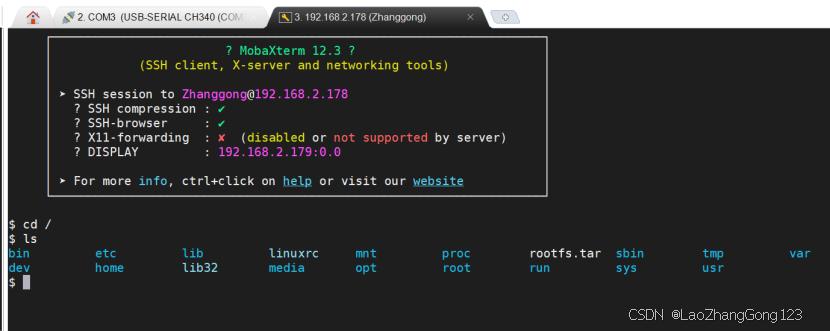
至此,我们完成了SSH测试。
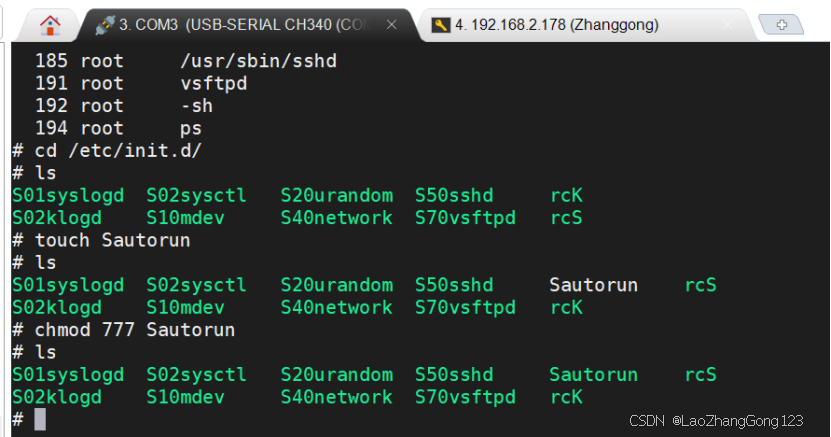
11、创建"自启动文件"
1)、输入"cd /etc/init.d/",切换到"init.d"目录
输入"ls"
输入"touch Sautorun",创建Sautorun文件
输入"ls"
输入"chmod 777 Sautorun",给"Sautorun"赋可执行权限
输入"ls"
2)、输入"vi Sautorun回车"
先按"A",然后输入内容:
#!/bin/sh
cd /
按"ESC键",输入":wq回车"
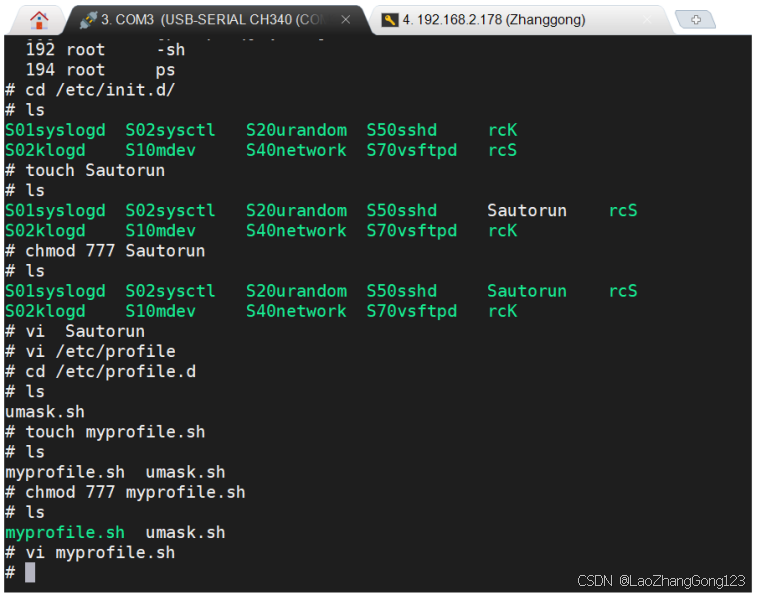
12、设置开发板需要显示路径
1)、输入"vi /etc/profile回车"
按"ESC键",输入":q!回车",不保存退出。
输入"cd /etc/profile.d回车"
输入"ls回车"
输入"touch myprofile.sh",创建脚本文件"myprofile.sh"
输入"ls回车"
输入"chmod 777 myprofile.sh",给myprofile.sh赋可执行权限
输入"ls回车"
输入"vi myprofile.sh",打开myprofile.sh文件
先按"A",再输入内容如下
#!/bin/sh
PS1='\\u@\\h:\w$ ' #\u表示用户名,\h表示主机名,\w表示显示当前工作目录的路径
export PS1
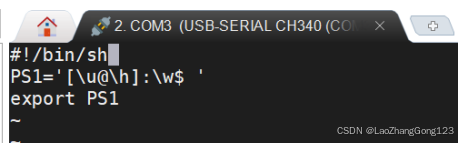
2)、按"ESC键",输入":wq回车",保存退出。
3)、输入"reboot"重启开发板
等待开发板启动完成,输入"root回车"
输入"cd /回车"
输入"ls回车"
输入"cd etc/回车"
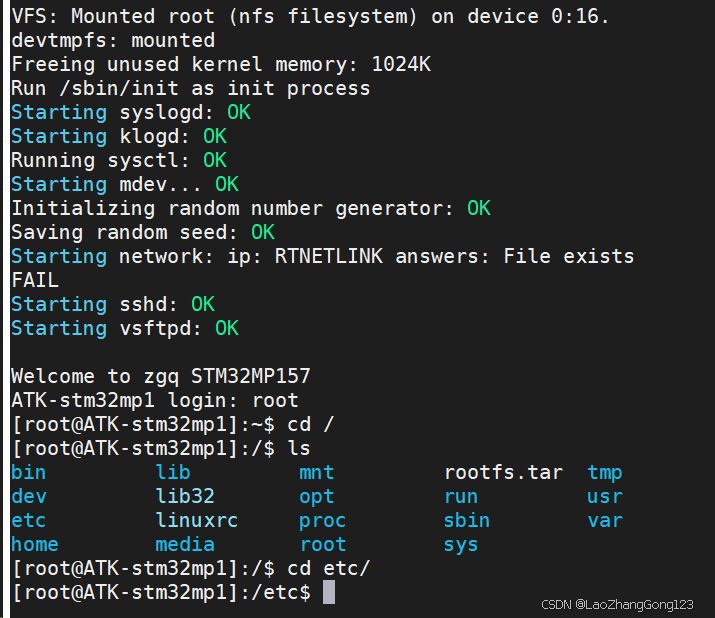
可以看到工作路径了。
13、使能"sysfs debug"目录
1)、输入"cd /sys/kernel/debug/"
输入"ls回车"
在"Sautorun"文件中,添加"mount -t debugfs none /sys/kernel/debug"
输入"vi /etc/init.d/Sautorun"
输入内容如下:
#!/bin/sh
mount -t debugfs none /sys/kernel/debug
4)、按"ESC键",输入":wq回车",保存退出。
输入"reboot"重启开发板
6)、等待开饭启动完成,输入"root回车"
输入"ls"
输入"ls /sys/kernel/debug/"
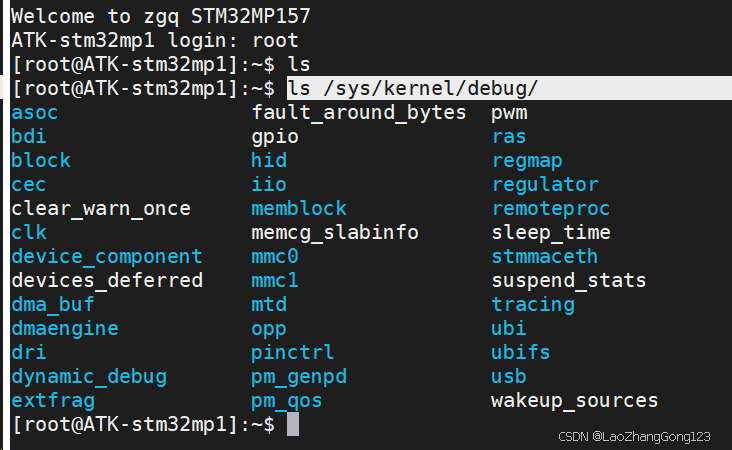
至此,根文件系统测试完成了。
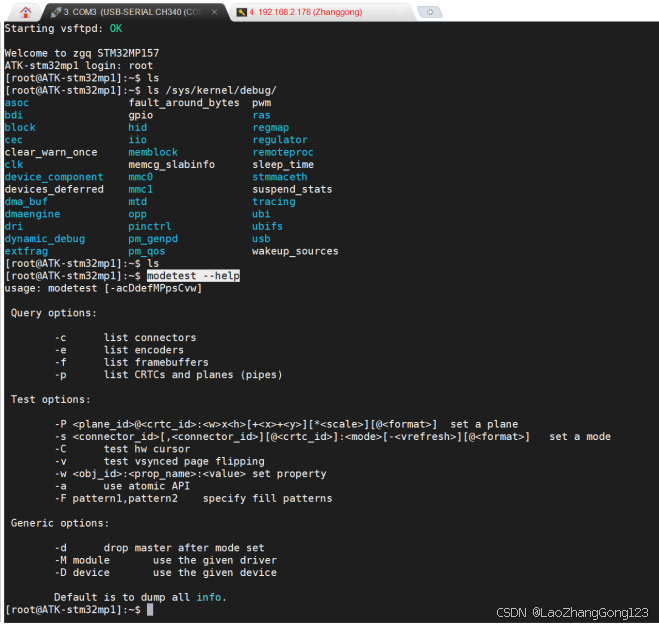
7)、输入"modetest --help回车",发现可以执行"modetest --help"
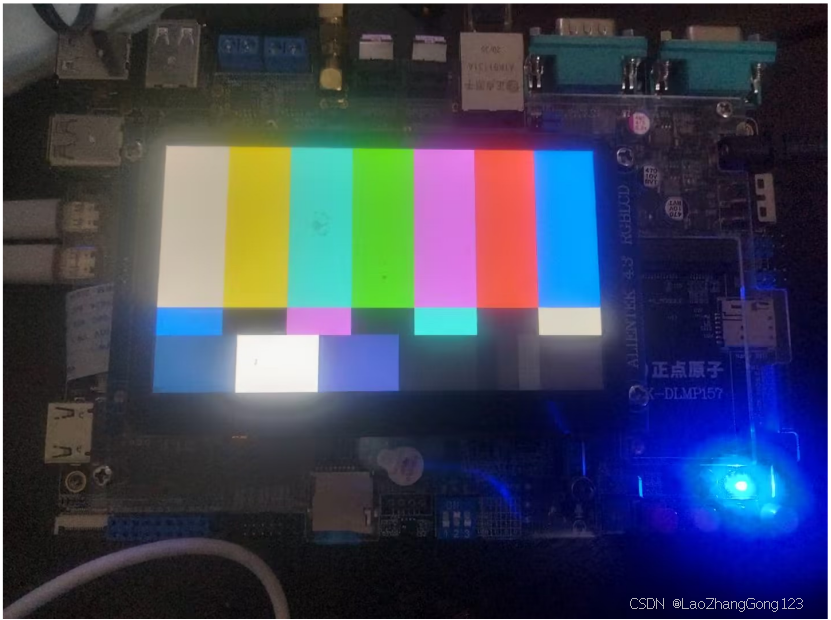
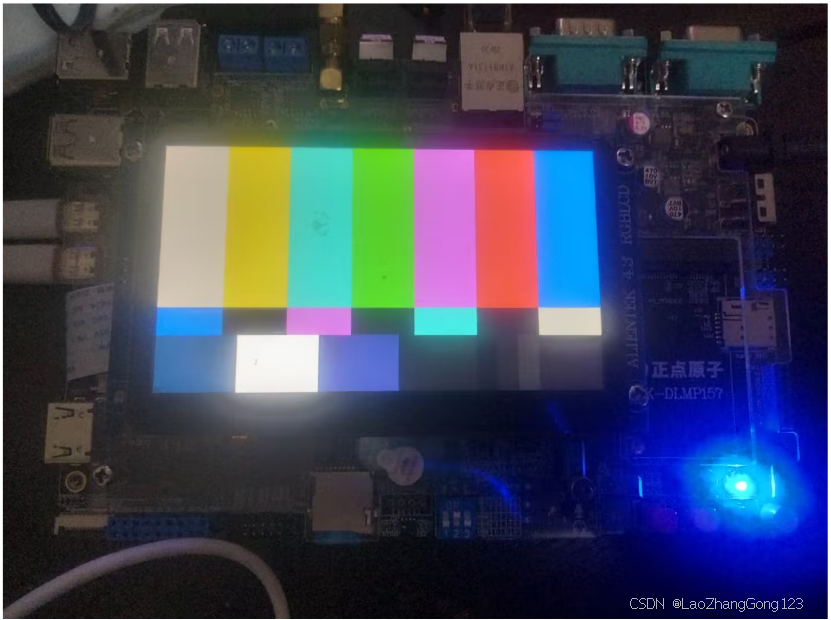
14、点亮显示屏
1)、输入"modetest --help回车"
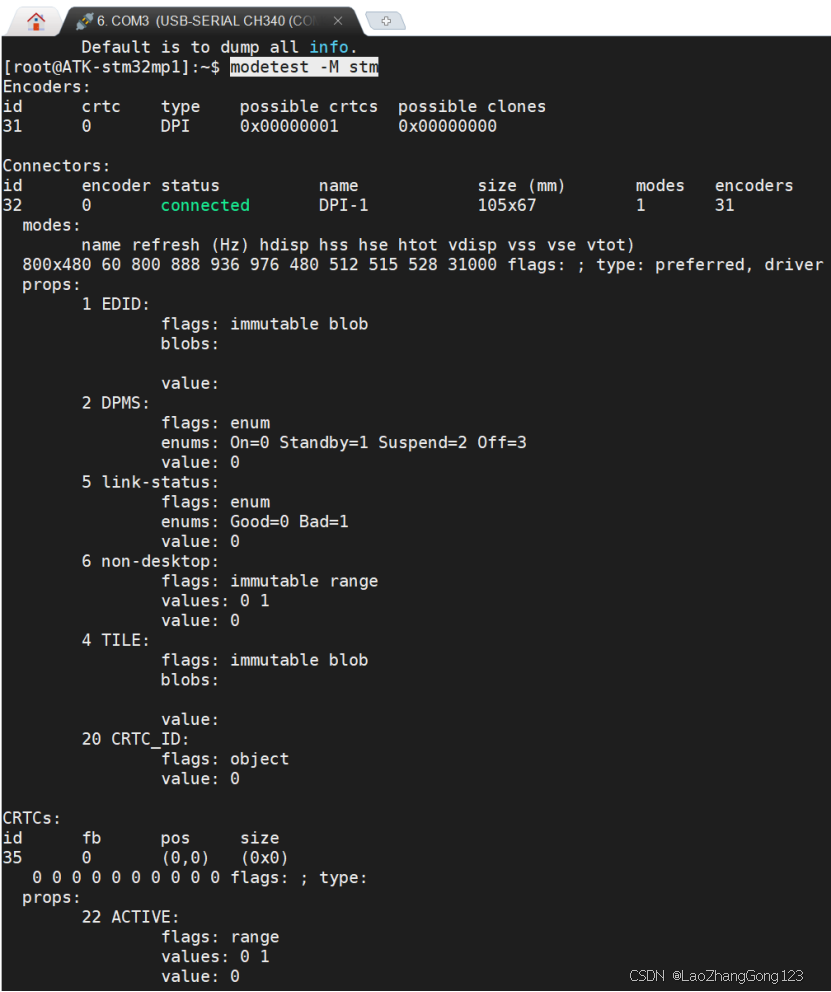
2)、输入"modetest -M stm回车"
输入"modetest -M stm回车"
输入"modetest -M stm -s 32@35:800x480回车"
具体显示内容如下:
Welcome to zgq STM32MP157
ATK-stm32mp1 login: root
root@ATK-stm32mp1:~$ modetest --help
usage: modetest -acDdefMPpsCvw
Query options:
-c list connectors
-e list encoders
-f list framebuffers
-p list CRTCs and planes (pipes)
Test options:
-P <plane_id>@<crtc_id>:<w>x<h>+\
-s <connector_id>,\
-C test hw cursor
-v test vsynced page flipping
-w <obj_id>:<prop_name>:<value> set property
-a use atomic API
-F pattern1,pattern2 specify fill patterns
Generic options:
-d drop master after mode set
-M module use the given driver
-D device use the given device
Default is to dump all info.
root@ATK-stm32mp1:~$ modetest -M stm
Encoders:
id crtc type possible crtcs possible clones
31 0 DPI 0x00000001 0x00000000
Connectors:
id encoder status name size (mm) modes encoders
32 0 connected DPI-1 105x67 1 31
modes:
name refresh (Hz) hdisp hss hse htot vdisp vss vse vtot)
800x480 60 800 888 936 976 480 512 515 528 31000 flags: ; type: preferred, driver
props:
1 EDID:
flags: immutable blob
blobs:
value:
2 DPMS:
flags: enum
enums: On=0 Standby=1 Suspend=2 Off=3
value: 0
5 link-status:
flags: enum
enums: Good=0 Bad=1
value: 0
6 non-desktop:
flags: immutable range
values: 0 1
value: 0
4 TILE:
flags: immutable blob
blobs:
value:
20 CRTC_ID:
flags: object
value: 0
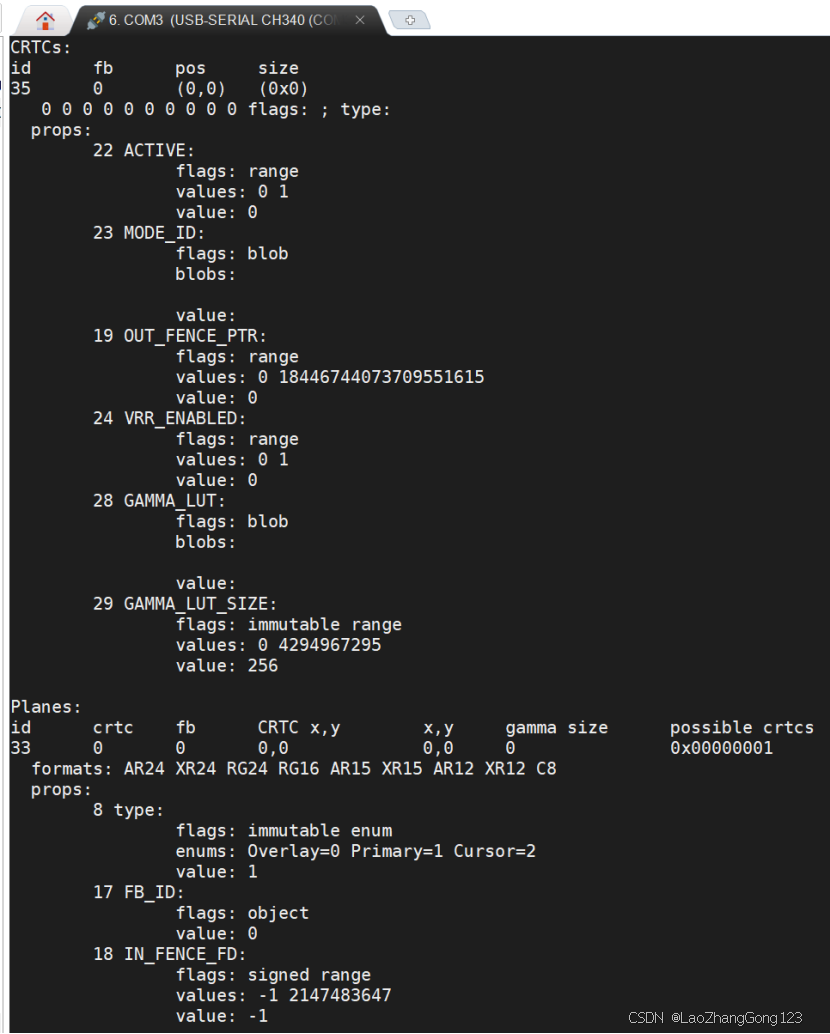
CRTCs:
id fb pos size
35 0 (0,0) (0x0)
0 0 0 0 0 0 0 0 0 0 flags: ; type:
props:
22 ACTIVE:
flags: range
values: 0 1
value: 0
23 MODE_ID:
flags: blob
blobs:
value:
19 OUT_FENCE_PTR:
flags: range
values: 0 18446744073709551615
value: 0
24 VRR_ENABLED:
flags: range
values: 0 1
value: 0
28 GAMMA_LUT:
flags: blob
blobs:
value:
29 GAMMA_LUT_SIZE:
flags: immutable range
values: 0 4294967295
value: 256
Planes:
id crtc fb CRTC x,y x,y gamma size possible crtcs
33 0 0 0,0 0,0 0 0x00000001
formats: AR24 XR24 RG24 RG16 AR15 XR15 AR12 XR12 C8
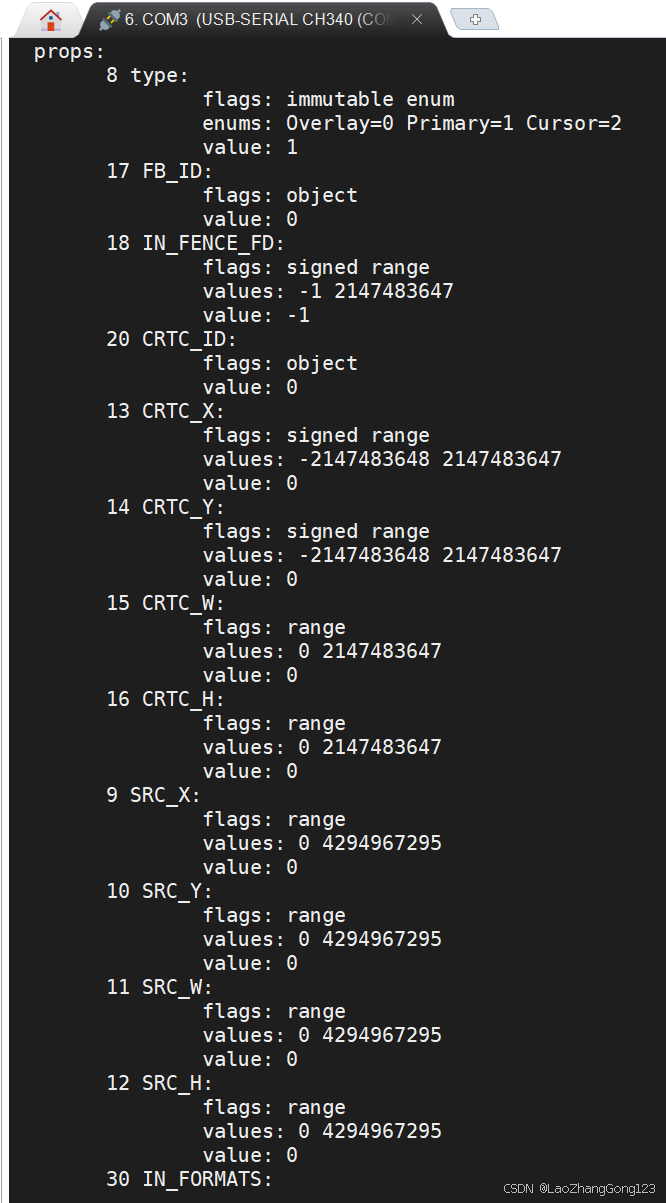
props:
8 type:
flags: immutable enum
enums: Overlay=0 Primary=1 Cursor=2
value: 1
17 FB_ID:
flags: object
value: 0
18 IN_FENCE_FD:
flags: signed range
values: -1 2147483647
value: -1
20 CRTC_ID:
flags: object
value: 0
13 CRTC_X:
flags: signed range
values: -2147483648 2147483647
value: 0
14 CRTC_Y:
flags: signed range
values: -2147483648 2147483647
value: 0
15 CRTC_W:
flags: range
values: 0 2147483647
value: 0
16 CRTC_H:
flags: range
values: 0 2147483647
value: 0
9 SRC_X:
flags: range
values: 0 4294967295
value: 0
10 SRC_Y:
flags: range
values: 0 4294967295
value: 0
11 SRC_W:
flags: range
values: 0 4294967295
value: 0
12 SRC_H:
flags: range
values: 0 4294967295
value: 0
30 IN_FORMATS:
flags: immutable blob
blobs:
value:
01000000000000000900000018000000
01000000400000004152323458523234
52473234524731364152313558523135
41523132585231324338202000000000
ff010000000000000000000000000000
0000000000000000
in_formats blob decoded:
AR24: LINEAR
XR24: LINEAR
RG24: LINEAR
RG16: LINEAR
AR15: LINEAR
XR15: LINEAR
AR12: LINEAR
XR12: LINEAR
C8 : LINEAR
36 0 0 0,0 0,0 0 0x00000001
formats: AR24 RG24 RG16 AR15 AR12 C8
props:
8 type:
flags: immutable enum
enums: Overlay=0 Primary=1 Cursor=2
value: 0
17 FB_ID:
flags: object
value: 0
18 IN_FENCE_FD:
flags: signed range
values: -1 2147483647
value: -1
20 CRTC_ID:
flags: object
value: 0
13 CRTC_X:
flags: signed range
values: -2147483648 2147483647
value: 0
14 CRTC_Y:
flags: signed range
values: -2147483648 2147483647
value: 0
15 CRTC_W:
flags: range
values: 0 2147483647
value: 0
16 CRTC_H:
flags: range
values: 0 2147483647
value: 0
9 SRC_X:
flags: range
values: 0 4294967295
value: 0
10 SRC_Y:
flags: range
values: 0 4294967295
value: 0
11 SRC_W:
flags: range
values: 0 4294967295
value: 0
12 SRC_H:
flags: range
values: 0 4294967295
value: 0
30 IN_FORMATS:
flags: immutable blob
blobs:
value:
01000000000000000600000018000000
01000000300000004152323452473234
52473136415231354152313243382020
3f000000000000000000000000000000
0000000000000000
in_formats blob decoded:
AR24: LINEAR
RG24: LINEAR
RG16: LINEAR
AR15: LINEAR
AR12: LINEAR
C8 : LINEAR
Frame buffers:
id size pitch
root@ATK-stm32mp1:~$ modetest -M stm -s 32@35:800x480
setting mode 800x480-60Hz@XR24 on connectors 32, crtc 35