一、原理介绍
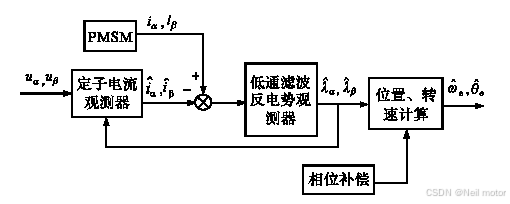
在众多无位置传感器控制方法中,低通滤波反电势观测器结构简单,参数整定容易,易于编程实现。但是该方法估计出的反电势会产生相位滞后,需要在估计永磁同步电机转子位置时进行了相位补偿。
二、仿真模型
在MATLAB/simulink里面验证所提算法,搭建采用PLL的传统SMO仿真。采用和实验中一致的控制周期1e-4,电机部分计算周期为1e-6。仿真模型如下所示:
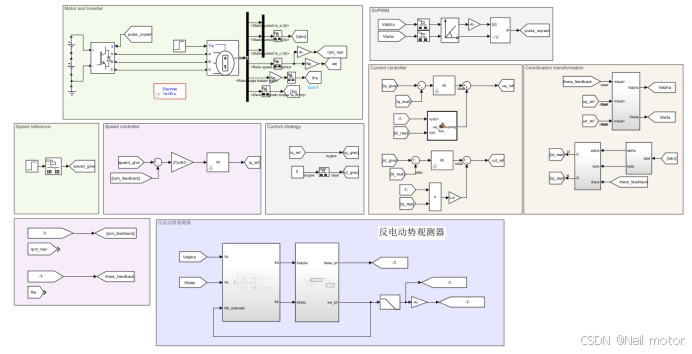
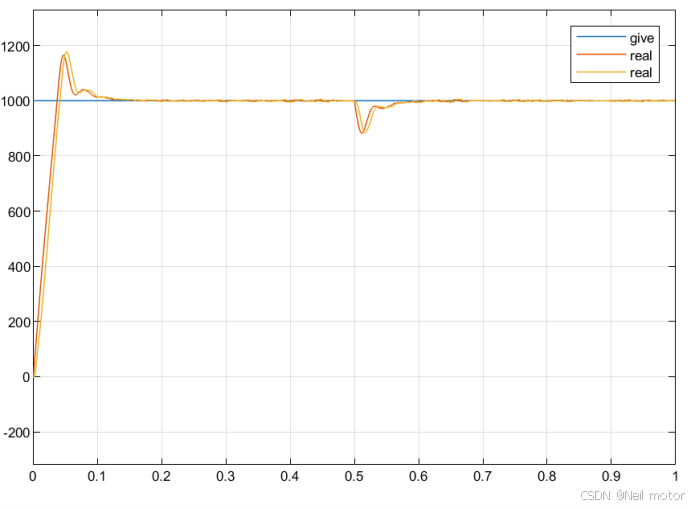
仿真工况:电机空载零速启动,0s阶跃给定转速1000rpm,0.5s施加额定负载
2.1给定转速、实际转速和估计转速
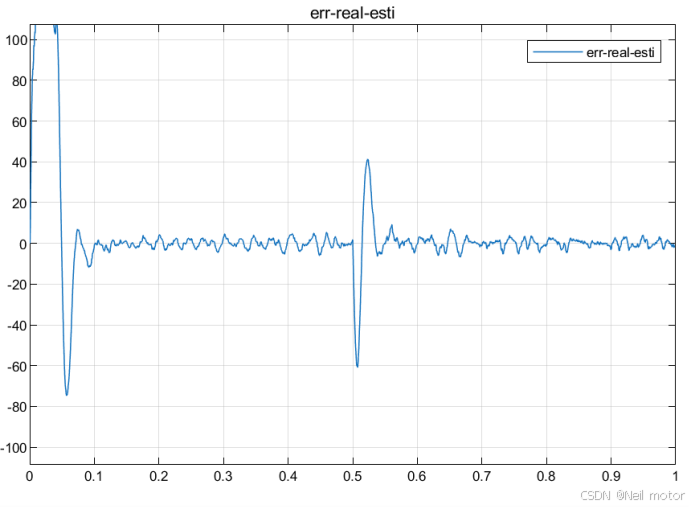
 2.2估计转速与实际转速误差
2.2估计转速与实际转速误差
2.3估计转角与实际转角
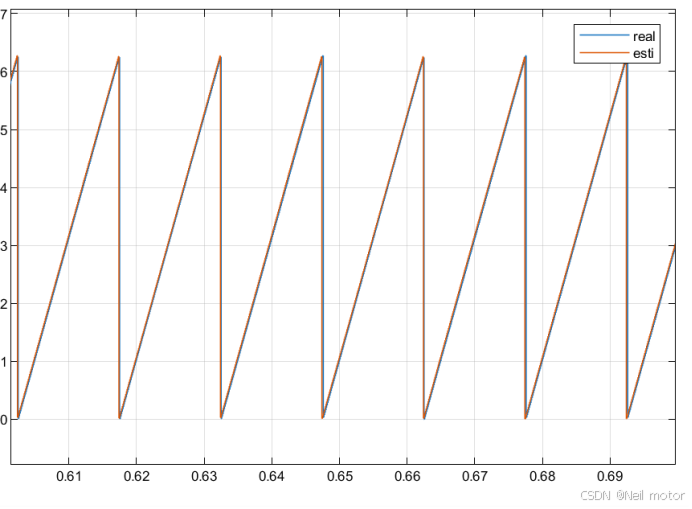
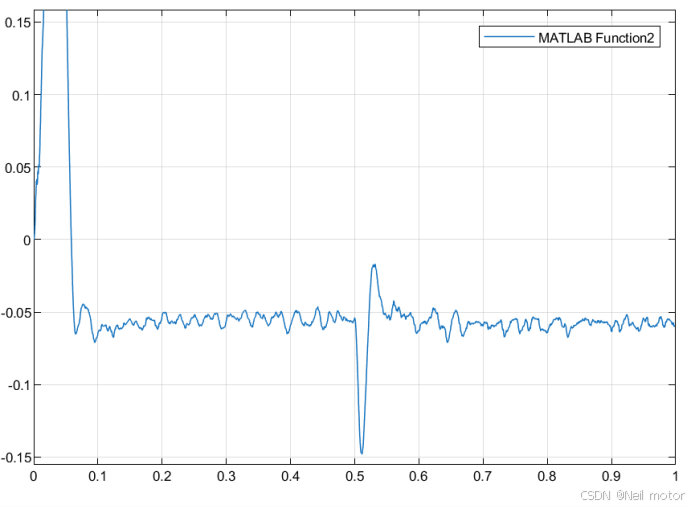
2.4估计转角与实际转角误差
2.5不加相位补偿的估计转角与实际转角

低通滤波反电势观测器结构简单、调参容易,其中只有一个参数Ka需要调节,Ka为低通滤波器的带宽。但是其表达式中含有积分环节, 当采样电流存在采样误差和直流偏置时,积分环节的存在也会产生误差积累。此外低通滤波特性会导致相位滞后,因此需要对由反电势计算出的转子位置进行实时相位补偿。但是为了补偿相位滞后需要利用实时的角速度信息,而角速度的估计值会影响到补偿效果。