目录
[2.1 基于序列的SNR估计](#2.1 基于序列的SNR估计)
[2.2 基于SNR估计值进行码率切换](#2.2 基于SNR估计值进行码率切换)
[2.3 根据数据量进行码率切换](#2.3 根据数据量进行码率切换)
1.算法仿真效果
matlab2022a仿真结果如下**(完整代码运行后无水印)**:

这个仿真结果给出了模拟的通信环境中SNR的实时变化曲线(图2)和数据传输量的变化曲线(图2)。然后LDPC根据当前信道的SNR和需要传输的数据量,实时调整编码率(图3)。此时系统的误码率为0(图4),每一个时刻的数据传输时间(图5)。

这里对比了固定码率与自适应LDPC的平均误码率。这里,自适应LDPC的平均码率约为0.37,这个指标会根据信道的SNR和数据传输量调整。

这个是误码率对比,固定码率下,0.3和0.4码率下,误码是零,其余误码率会存在误码,采用自适应码率,整体误码为零。

自适应码率,由于不完全采用的是0.3码率,所以其整体传输时间比0.3固定码率要短。
仿真操作步骤可参考程序配套的操作视频。
2.算法涉及理论知识概要
在现代通信系统中,为了在有限的带宽和功率条件下实现可靠的数据传输,差错控制编码技术起着关键作用。低密度奇偶校验(LDPC)码作为一种性能优异的差错控制编码,已广泛应用于各种通信场景。传统的固定码率LDPC码在不同信道条件下难以兼顾传输效率和可靠性。而基于信噪比(SNR)估计的自适应码率LDPC编译码算法能够根据信道状况动态调整码率,从而优化系统的传输性能。
在信道条件较好时,较高的码率可以带来较高的传输效率,但当信道条件变差时,由于误码率增加,需要更多的重传或其他纠错措施,反而可能降低了实际的有效传输效率。
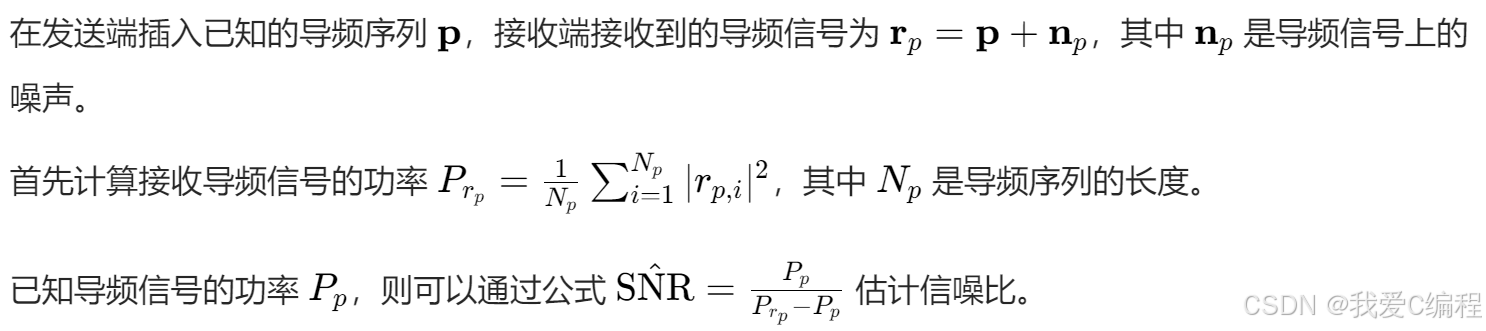
2.1 基于序列的SNR估计
2.2 基于SNR估计值进行码率切换
当检测到信噪比发生变化,需要切换码率时,发送端和接收端需要进行相应的调整。发送端需要重新生成新码率对应的生成矩阵G和奇偶校验矩阵H,并对信息序列进行重新编码。接收端需要根据新的码率调整解码算法的参数,如迭代次数等。
与固定码率编码相比,自适应码率编码需要额外的SNR估计模块和码率选择模块。在固定码率编码中,生成矩阵是固定不变的,而自适应码率编码根据信道状况动态选择生成矩阵,使得编码后的码字能够更好地适应信道条件。
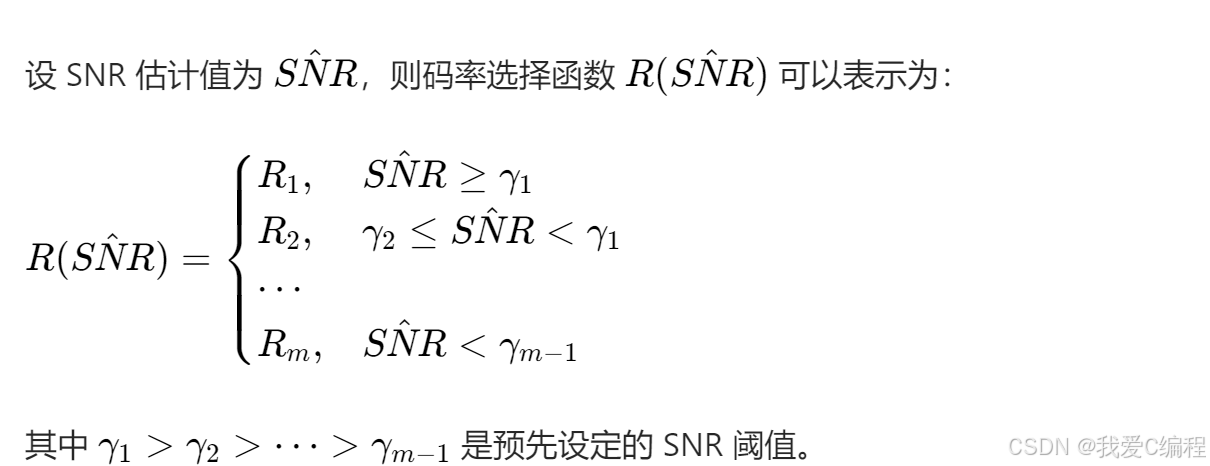
根据SNR估计值,自适应码率LDPC系统需要动态调整码率。通常,系统会预先定义一组不同码率的 LDPC 码,如 R1,R2,⋯,Rm,并建立SNR与码率的映射关系。
2.3 根据数据量进行码率切换
在信道条件较好时,通过选择较高的码率,系统可以提高单位时间的数据传输量,从而提高传输效率。而固定码率系统由于码率固定,无法充分利用良好的信道条件。
在信道条件较差时,自适应码率系统通过降低码率保证传输的可靠性,减少重传次数,从而提高实际的有效传输效率。而固定码率系统可能需要大量的重传,导致实际传输效率降低。
基于SNR估计的自适应码率LDPC编译码算法通过动态调整码率,能够根据信道的SNR以及单位时间的数据传输量进行优化。与固定码率LDPC系统相比,自适应码率系统在误码率性能、传输效率和系统吞吐量等方面都具有明显优势。然而,自适应码率系统也增加了系统的复杂度,需要准确的SNR估计和高效的码率切换机制。
3.MATLAB核心程序
.................................................................
for i = 1:time
i
SNRs= SNR(i);%当前时刻SNR
TT = Throughout(i);%当前时刻待发射数据量
tmps = Rec_BPSK(4097:end);
success = 0;
KKs = [0.92:0.02:1.08];
for j = 1:floor(TT/(Ns-Ms))
x_hat = [z_hat(size(G,2)+1-size(G,1):size(G,2))]';
if length(x_hat)==length(Trans_data{j})%
[nberr,rat] = biterr(x_hat,Trans_data{j});
Num_err = Num_err+nberr;
else%码率识别失败
Num_err = Num_err+length(Trans_data{j});
end
end
%统计误码
errrate(i)=Num_err/(length(Trans_BPSK)-4096)/floor(TT/(Ns-Ms));
%统计传输时间
timess(i) =floor(TT/(Ns-Ms));
end
errrate2=smooth(errrate,16);
timess2=smooth(timess,16);
figure;
subplot(511);
plot(SNR,'LineWidth',2)
hold on
plot(SNRest_,'LineWidth',2)
legend('真实SNR变化','接收端SNR估计值');
xlabel('时间');
title('500个时间单位模拟的SNR变化曲线');
subplot(512);
plot(Throughout,'LineWidth',2)
xlabel('时间');
title('500个时间单位模拟的数据吞吐量变化曲线');
subplot(513);
plot(HR,'LineWidth',2);
xlabel('时间');
title('LDPC码率变化');
subplot(514);
plot(errrate2,'LineWidth',2);
xlabel('时间');
title('误码率');
grid on
subplot(515);
plot(timess2,'LineWidth',2);
title('时间');
ylabel('传输总时间');
grid on
% ylim([0,30]);
save B3.mat SNR Throughout HR errrate2 timess2 SNRest_
0X_080m4.完整算法代码文件获得
V