0.项目地址:
环境列表
| 代码中的环境名称 | 沟通 | 竞争 | 描述 |
|---|---|---|---|
| simple | N | N | 单个智能体看到地标位置,根据它与地标的接近程度进行奖励。不是多智能体环境------用于调试策略。 |
| simple_adversary.py | (物理欺骗) | N | 是 1 个对手(红色),N 个优秀智能体(绿色),N 个地标(通常 N=2)。所有智能体都会观察地标和其他智能体的位置。一个地标是"目标地标"(绿色)。好的智能体根据其中一个与目标地标的接近程度进行奖励,但如果对手靠近目标地标,则获得负面奖励。对手根据它与目标的接近程度获得奖励,但它不知道哪个地标是目标地标。因此,优秀的智能体必须学会"拆分"并覆盖所有地标以欺骗对手。 |
| simple_crypto.py (秘密交流) | 是 | 是 | 两个好智能体人(爱丽丝和鲍勃),一个对手(夏娃)。Alice 必须通过公共频道向 bob 发送私人消息。Alice 和 bob 会根据 bob 重建消息的程度获得奖励,但如果 eve 能够重建消息,则获得负面奖励。Alice 和 bob 有一个私钥(在每集开始时随机生成),他们必须学会使用它来加密消息。 |
| simple_push.py (远离) | N | 是 | 1 个智能体、1 个对手、1 个地标。智能体根据与地标的距离进行奖励。如果对手靠近地标,并且智能体远离地标,则它会得到奖励。因此,对手学会将智能体推离地标。 |
| simple_reference.py | 是 | N | 2 个智能体,3 个不同颜色的地标。每个智能体都想到达他们的目标地标,只有其他智能体知道。奖励是集体的。因此,智能体必须学会传达另一个智能体的目标,并导航到他们的地标。这与 simple_speaker_listener 场景相同,其中两个智能体同时是说话者和听众。 |
| simple_speaker_listener.py (合作交流) | 是 | N | 与 simple_reference 相同,除了一个智能体是不动的"说话者"(灰色)(观察其他智能体的目标),另一个智能体是听者(不能说话,但必须导航到正确的地标)。 |
| simple_spread.py (合作导航) | N | N | N 个智能体,N 个地标。根据任何智能体与每个地标的距离对智能体进行奖励。如果智能体与其他智能体发生冲突,则会受到惩罚。因此,智能体必须学会在避免碰撞的同时覆盖所有地标。 |
| simple_tag.py (捕食者-猎物) | N | 是 | 捕食者-猎物环境。好的智能体(绿色)速度更快,并且希望避免被对手(红色)击中。对手速度较慢,并希望打击优秀的智能体。障碍物(大黑圈)挡住了去路。 |
| simple_world_comm.py | 是 | 是 | 在论文随附的视频中看到的环境。与 simple_tag 相同,除了 (1) 有食物(蓝色小球),好智能体会因为靠近而获得奖励,(2)我们现在有"森林",可以将智能体隐藏在里面,从外面看不到;(3)有一个"领导对手",可以随时看到智能体人,并可以与其他对手沟通,帮助协调追击。 |
如果从头开始就按下面步骤来,不要跳。
1.创建虚拟环境
指令格式:conda create -n env_name python=x.x
输入:
bash
conda create -n mpe python=3.6安装环境默认路径在 Anaconda 目录下的 envs 里面,如图:一路点Yes

2.激活虚拟环境
bash
conda activate mpe从base环境进入mpe项目环境,后面的依赖包会下载到项目环境里,避免与其他项目冲突出现版本问题。

3.下载相关依赖包
注意版本问题,新版本gym会报错"prng模块的缺失",pyglet版本太高也会报错。
依赖包版本如下(能正常跑的):
Python =3.6 gym=0.10.5 tensorflow = 1.14.0 numpy =1.19.5 pyglet = 1.5.9
输入:
bash
pip install gym==0.10.5 tensorflow==1.14.0 pyglet==1.5.94.安装openAI的Multiagent-particle-envs
进入"multiagent-particle-envs"目录,安装环境(最后的点 . 不要漏了):
bash
pip install -e.
5.测试环境:
bash
python bin/interactive.py --scenario simple.py成功的话得到如下画面:
说明包版本啥的没有问题,可以继续。
6. 安装openAI的maddpg算法
-
下载克隆maddpg开源项目文件openai/maddpggithub.com到mpe的同一目录下,目录结构如图:

-
进入
maddgp目录:

- 安装
python
pip install -e.-
测试
安装完成后,输入如下代码进行测试
bashcd experiments python train.py --scenario simple以下画面说明成功:按
ctrl+c命令行终止
- 开可视化
找到
maddpg->experiments->train.py中,找到display可视化属性,改为True即可看见训练过程
如下图说明成功:

7.切换其他环境
在maddpg/experiments文件夹下运行如下代码:
bash
cd experiments
python train.py --scenario simple_tag
如果要可视化,后面加上display属性:
bash
python train.py --scenario simple_tag --display
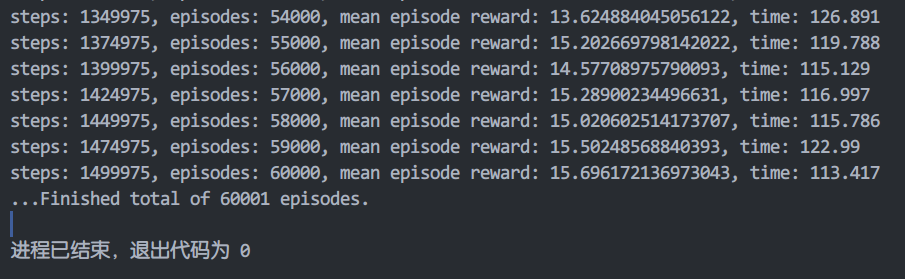
训练完:默认episodes: 60000
注意:第一次训练时display一定得设置为false,第二次运行train.py时才能导入第一次跑完存储的模型进行可视化。
--display: 展示训练结果, 但不继续训练 (默认: False)
不然会报错:

以上就完成了环境配置。其他的遇到文件夹路径、包导入之类的基本问题,可以自行查阅解决。
8.命令参数说明
主要剖析simple_tag环境
环境选项
--scenario: 选择多智能体环境场景脚本名称(如simple_tag.py)(默认:"simple")--max-episode-len:单个episode的最大步长,超过此步长会强制终止 (默认:25)--num-episodes:总训练episode数量 (默认:60000)--num-adversaries: 环境中的adversary数量 (默认:0)(需与场景脚本中定义的一致)--good-policy: 环境中good policy算法(默认:"maddpg"; 选项: {"maddpg","ddpg"})--adv-policy: 环境中adversary policy算法(默认:"maddpg"; 选项: {"maddpg","ddpg"})
关键点:
--num-adversaries必须与场景脚本(如simple_tag.py)中定义的对抗者数量一致,否则策略分配会出错,导致曲线收敛可能达不到预期效果。--good-policy和--adv-policy指定不同类别智能体的算法,默认为maddpg。


核心训练参数
--lr: Adam优化器的学习率 (默认:1e-2),如果学习率过高,可能导致策略更新不稳定;过低则学习缓慢。--gamma: 奖励折扣因子(discount factor) (默认:0.95),这可能影响长期奖励的累积。如果任务需要更长期的规划,可能需要更高的gamma。--batch-size: 从经验回放池中采样的批量大小 (默认:1024),较大的批次可能影响更新的稳定性,尤其是在初期训练阶段。--num-units: 神经网络隐藏层的单元数 (默认:64)
保存
--exp-name: 实验名称,用于保存结果的文件名前缀 (默认:None)--save-dir: 模型保存目录 (默认:"/tmp/policy/")--save-rate:每完成多少个episode保存一次模型 (默认:1000)--load-dir: 预训练模型加载目录 (默认:"")
评估
--restore: 恢复在load-dir的训练结果, 并且继续训练 (默认:False)--display: 是否实时渲染环境(训练时可视化), 但不继续训练 (默认:False)--benchmark: 是否进入评估模式(不训练,仅测试策略性能,保存结果到benchmark-dir文件夹 (默认:False)--benchmark-iters: 执行基准评估的训练周期 (默认:100000)--benchmark-dir: 存放基准数据的目录 (默认:"./benchmark_files/")--plots-dir: 存放训练曲线的目录 (默认:"./learning_curves/")
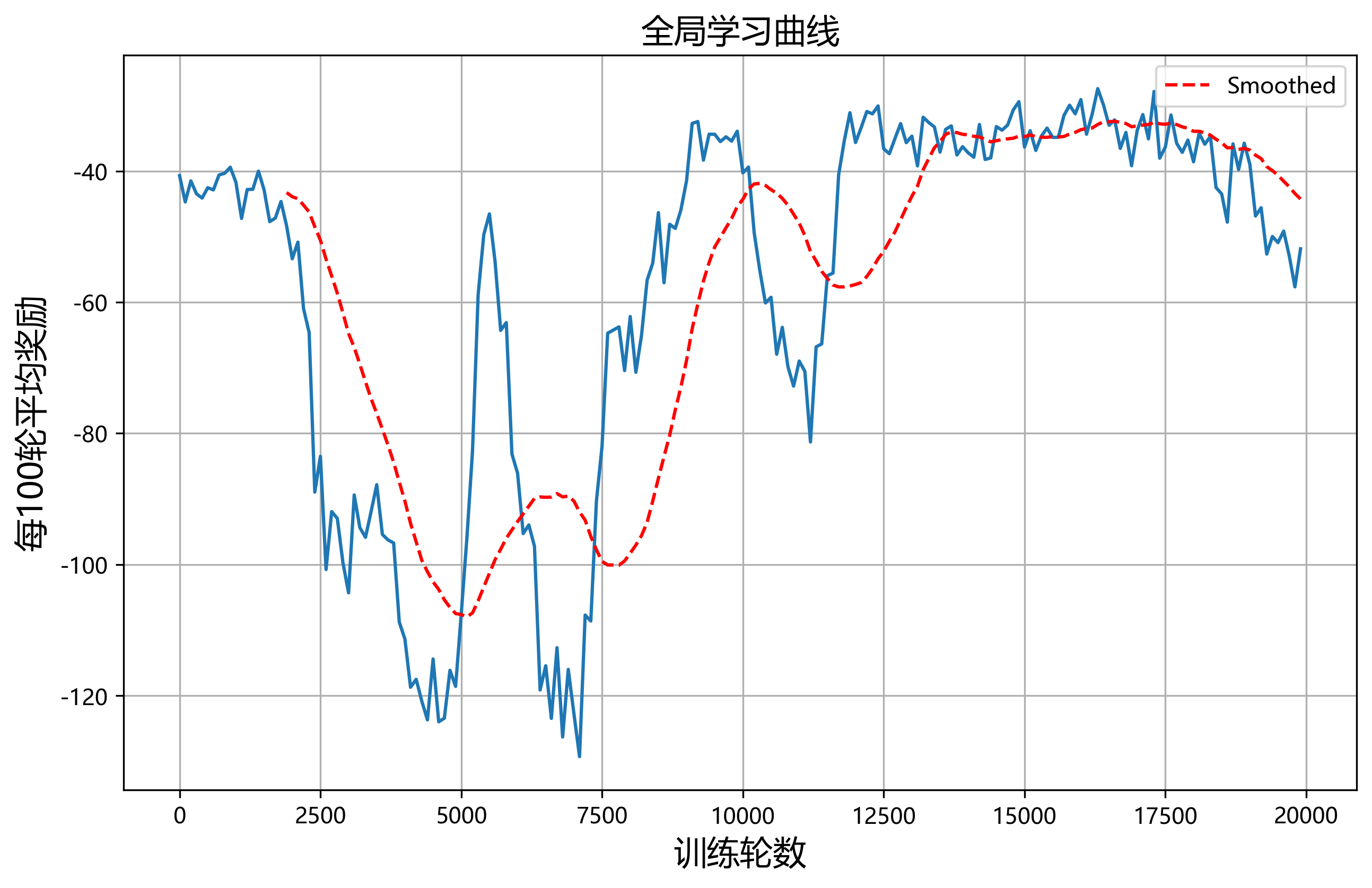
(1) None_rewards.pkl
- 数据类型 :列表(
final_ep_rewards)。 - 具体内容 :
- 每个元素表示训练过程中 每间隔
save_rate个 episodes 的平均总奖励。 - 例如,若
save_rate=100,则列表中第i个元素对应第i*100个 episodes 的平均总奖励。
- 每个元素表示训练过程中 每间隔
- 用途 :用于绘制 全局学习曲线,反映整体策略的收敛性和性能变化。
(2) None_agrewards.pkl
-
数据类型 :列表(
final_ep_ag_rewards)。 -
具体内容:
-
每个元素表示训练过程中 每个智能体在间隔
save_rate个 episodes 内的平均奖励。 -
例如,若有 3 个智能体,
save_rate=100,则列表中元素顺序为:[智能体1的第100轮平均奖励, 智能体2的第100轮平均奖励, 智能体3的第100轮平均奖励, 智能体1的第200轮平均奖励, ...]
-
-
用途 :用于分析 各智能体的独立学习曲线,观察协作或竞争行为对个体奖励的影响。
Demo
-
进行训练
python train.py --scenario simple_push --num-episodes 1000000 --exp-name exp1 --save-dir dir -
训练结果可视化
python train.py --scenario simple_push --load-dir dir --display -
继续训练
python train.py --scenario simple_push --load-dir dir --restore --num-episodes 80000
9.代码注释
训练文件train.py
1. 神经网络模型定义 (mlp_model)
python
def mlp_model(input, num_outputs, scope, reuse=False, num_units=64, rnn_cell=None):
"""
定义一个2层全连接神经网络
:param input: 输入张量(观测状态)
:param num_outputs: 输出层维度(对应动作空间)
:param scope: 变量作用域名称(用于区分不同Agent的网络)
:param reuse: 是否重用变量(用于共享参数)
:param num_units: 隐藏层单元数(通过--num-units参数指定)
"""
with tf.variable_scope(scope, reuse=reuse):
out = layers.fully_connected(input, num_units, tf.nn.relu) # 第一层:64单元,ReLU激活
out = layers.fully_connected(out, num_units, tf.nn.relu) # 第二层:64单元,ReLU激活
out = layers.fully_connected(out, num_outputs, None) # 输出层:线性激活
return out结构示意图:
python
输入层(obs_dim) -> 隐藏层(64) -> 隐藏层(64) -> 输出层(action_dim)2. 环境创建 (make_env)
python
def make_env(scenario_name, arglist, benchmark=False):
"""
根据场景名称创建多智能体环境
:param scenario_name: 场景脚本名称(如simple_tag)
:param arglist: 命令行参数
:param benchmark: 是否为评估模式(影响环境是否返回基准数据)
"""
from multiagent.environment import MultiAgentEnv
import multiagent.scenarios as scenarios
# 动态加载场景脚本(如simple_tag.py)
scenario = scenarios.load(scenario_name + ".py").Scenario()
world = scenario.make_world() # 调用场景的make_world方法创建世界
# 根据模式创建环境
if benchmark:
env = MultiAgentEnv(world, scenario.reset_world, scenario.reward,
scenario.observation, scenario.benchmark_data)
else:
env = MultiAgentEnv(world, scenario.reset_world, scenario.reward,
scenario.observation)
return env3. 智能体训练器初始化 (get_trainers)
python
def get_trainers(env, num_adversaries, obs_shape_n, arglist):
"""
为每个智能体创建对应的训练器(MADDPGAgentTrainer)
:param env: 环境对象
:param num_adversaries: 对抗者数量(通过--num-adversaries指定)
:param obs_shape_n: 所有智能体的观测空间形状列表
:param arglist: 命令行参数
"""
trainers = []
model = mlp_model # 使用的神经网络模型
# 为对抗者创建训练器(使用adv-policy参数)
for i in range(num_adversaries):
trainers.append(MADDPGAgentTrainer(
name="agent_%d" % i,
model=model,
obs_shape=obs_shape_n,
act_space=env.action_space[i],
agent_index=i,
arglist=arglist,
local_q_func=(arglist.adv_policy == 'ddpg') # 若为DDPG则使用局部Q函数
))
# 为合作者创建训练器(使用good-policy参数)
for i in range(num_adversaries, env.n):
trainers.append(MADDPGAgentTrainer(
name="agent_%d" % i,
model=model,
obs_shape=obs_shape_n,
act_space=env.action_space[i],
agent_index=i,
arglist=arglist,
local_q_func=(arglist.good_policy == 'ddpg')
))
return trainers关键逻辑:
- 前
num_adversaries个Agent被标记为对抗者,使用adv-policy参数指定的算法。 - 剩余Agent为合作者,使用
good-policy参数。
4. 主训练循环 (train)
python
def train(arglist):
with U.single_threaded_session(): # 创建TensorFlow单线程会话
# 环境初始化
env = make_env(arglist.scenario, arglist)
obs_shape_n = [env.observation_space[i].shape for i in range(env.n)]
# 训练器初始化(区分对抗者和合作者)
num_adversaries = min(env.n, arglist.num_adversaries)
trainers = get_trainers(env, num_adversaries, obs_shape_n, arglist)
# TensorFlow变量初始化
U.initialize()
# 经验回放相关变量
episode_rewards = [0.0] # 累计奖励
agent_rewards = [[0.0] for _ in range(env.n)] # 每个Agent的独立奖励
# 主循环
obs_n = env.reset()
episode_step = 0
train_step = 0
while True:
# 1. 获取动作
action_n = [agent.action(obs) for agent, obs in zip(trainers, obs_n)]
# 2. 环境交互
new_obs_n, rew_n, done_n, info_n = env.step(action_n)
episode_step += 1
# 3. 存储经验
for i, agent in enumerate(trainers):
agent.experience(obs_n[i], action_n[i], rew_n[i],
new_obs_n[i], done_n[i], terminal)
# 4. 更新观察状态
obs_n = new_obs_n
# 5. 累计奖励记录
for i, rew in enumerate(rew_n):
episode_rewards[-1] += rew
agent_rewards[i][-1] += rew
# 6. Episode终止判断
if done or (episode_step >= arglist.max_episode_len):
obs_n = env.reset()
episode_step = 0
episode_rewards.append(0)
for a in agent_rewards:
a.append(0)
# 7. 网络更新(非评估模式下)
if not (arglist.display or arglist.benchmark):
for agent in trainers:
agent.preupdate() # 准备更新(如清空梯度)
for agent in trainers:
loss = agent.update(trainers, train_step) # 执行MADDPG的Actor-Critic更新
# 8. 定期保存模型
if terminal and (len(episode_rewards) % arglist.save_rate == 0):
U.save_state(arglist.save_dir, saver=saver)
print(f"当前进度: {len(episode_rewards)} episodes, 平均奖励: {np.mean(episode_rewards[-arglist.save_rate:])}")
# 9. 终止条件
if len(episode_rewards) > arglist.num_episodes:
# 保存最终奖励数据
with open(os.path.join(arglist.plots_dir, f"{arglist.exp_name}_rewards.pkl"), 'wb') as f:
pickle.dump(final_ep_rewards, f)
break关键问题解答:对抗者是否生效?
在 simple_tag.py 中定义的 num_adversaries = 3 需要与启动命令中的 --num-adversaries 3 匹配:
bash
# 正确启动命令(必须显式指定)
python train.py --scenario simple_tag --num-adversaries 3 --good-policy maddpg --adv-policy maddpg- 若未指定:训练器会将所有Agent视为合作者,导致对抗者策略错误。
- 正确指定时:第一个Agent使用对抗者策略,其余为合作者策略。
simple_tag文件
1. 场景基类与核心定义
python
from multiagent.core import World, Agent, Landmark
from multiagent.scenario import BaseScenario
class Scenario(BaseScenario):
"""
多智能体对抗场景基类,继承自 BaseScenario
核心功能:定义世界属性、智能体行为、奖励机制和观测空间
"""2. 世界构建方法 make_world
python
def make_world(self):
world = World() # 创建世界对象
# --- 世界属性设置 ---
world.dim_c = 2 # 通信维度(智能体间传递信息的向量长度)
# --- 智能体数量配置 ---
num_good_agents = 1 # 合作者(绿色)数量
num_adversaries = 3 # 对抗者(红色)数量
num_agents = num_adversaries + num_good_agents # 总智能体数 = 3+1=4
num_landmarks = 1 # 地标(障碍物)数量
# --- 初始化智能体 ---
world.agents = [Agent() for i in range(num_agents)] # 创建智能体列表
for i, agent in enumerate(world.agents):
agent.name = 'agent %d' % i # 智能体名称(agent 0~3)
agent.collide = True # 是否允许碰撞(True=实体碰撞生效)
agent.silent = True # 是否静默(True=不发送通信信号)
agent.adversary = True if i < num_adversaries else False # 前3个为对抗者
# --- 物理属性 ---
agent.size = 0.075 if agent.adversary else 0.05 # 对抗者尺寸稍大
agent.accel = 4.0 # 加速度(控制移动灵敏度的参数,值越大响应越快)
agent.max_speed = 1.3 # 最大移动速度(单位:仿真环境坐标系/步)
# !! 注意:以下代码存在问题,会导致覆盖已创建的智能体 !!
# 正确做法应直接修改已存在智能体的属性,而非重新创建
for i in range(num_adversaries):
agent = Agent() # 错误:这里重新创建了新的智能体实例
agent.adversary = True
agent.max_speed = 1.0 + 0.2 * i # 意图差异化速度但未正确实现
agent.accel = 3.0 + 0.5 * i
# --- 地标(障碍物)初始化 ---
world.landmarks = [Landmark() for i in range(num_landmarks)]
for i, landmark in enumerate(world.landmarks):
landmark.name = 'landmark %d' % i
landmark.collide = True # 地标是否可碰撞(True=智能体会被阻挡)
landmark.movable = False # 地标是否可移动
landmark.size = 0.2 # 地标尺寸(大于智能体尺寸,形成障碍)
landmark.boundary = False # 是否作为边界(False=普通障碍物)
self.reset_world(world) # 调用重置方法初始化状态
return world3. 世界重置方法 reset_world
python
def reset_world(self, world):
# --- 智能体颜色设置 ---
for i, agent in enumerate(world.agents):
# 对抗者红色 [0.85,0.35,0.35],合作者绿色 [0.35,0.85,0.35]
agent.color = np.array([0.35,0.85,0.35]) if not agent.adversary else np.array([0.85,0.35,0.35])
# --- 地标颜色设置(灰色)---
for landmark in world.landmarks:
landmark.color = np.array([0.25, 0.25, 0.25])
# --- 随机初始位置与速度 ---
for agent in world.agents:
agent.state.p_pos = np.random.uniform(-1, +1, world.dim_p) # 位置随机
agent.state.p_vel = np.zeros(world.dim_p) # 初始速度归零
agent.state.c = np.zeros(world.dim_c) # 通信信号归零
# 地标随机位置(边界内)
for landmark in world.landmarks:
if not landmark.boundary:
landmark.state.p_pos = np.random.uniform(-0.9, +0.9, world.dim_p)
landmark.state.p_vel = np.zeros(world.dim_p)4. 奖励函数设计
合作者奖励 agent_reward
python
def agent_reward(self, agent, world):
rew = 0 # 初始化奖励
adversaries = self.adversaries(world) # 获取所有对抗者
# --- 碰撞惩罚 ---
if agent.collide:
for a in adversaries:
if self.is_collision(a, agent):
rew -= 10 # 被对抗者碰撞一次扣10分
# --- 边界惩罚 ---
def bound(x):
""" 越界惩罚函数,防止智能体逃离战场 """
if x < 0.9: return 0
if x < 1.0: return (x - 0.9) * 10 # 接近边界时线性惩罚
return min(np.exp(2 * x - 2), 10) # 超出边界时指数惩罚
for p in range(world.dim_p):
x = abs(agent.state.p_pos[p]) # 检查每个坐标轴是否越界
rew -= bound(x)
return rew对抗者奖励 adversary_reward
python
def adversary_reward(self, agent, world):
rew = 0
agents = self.good_agents(world) # 获取合作者(此处只有1个)
# --- 基于距离的奖励塑形(可选)---
if shape: # 当shape=True时启用
for adv in self.adversaries(world):
# 计算与最近合作者的距离,距离越近奖励越高(负值越小)
min_dist = min([np.linalg.norm(a.state.p_pos - adv.state.p_pos) for a in agents])
rew -= 0.1 * min_dist
# --- 捕获奖励 ---
if agent.collide:
for ag in agents:
if self.is_collision(ag, agent):
rew += 10 # 成功捕获合作者加10分
return rew5. 观测空间构建 observation
python
def observation(self, agent, world):
# --- 实体位置(相对坐标)---
entity_pos = []
for entity in world.landmarks: # 地标位置(障碍物)
if not entity.boundary:
entity_pos.append(entity.state.p_pos - agent.state.p_pos)
# --- 其他智能体信息 ---
comm = [] # 通信信号(本场景未使用)
other_pos = [] # 其他智能体相对位置
other_vel = [] # 其他智能体速度(仅合作者)
for other in world.agents:
if other is agent: continue # 排除自身
comm.append(other.state.c)
other_pos.append(other.state.p_pos - agent.state.p_pos)
if not other.adversary: # 只记录合作者的速度
other_vel.append(other.state.p_vel)
# 合并观测向量:[自身速度, 自身位置, 地标位置, 其他智能体位置, 合作者速度]
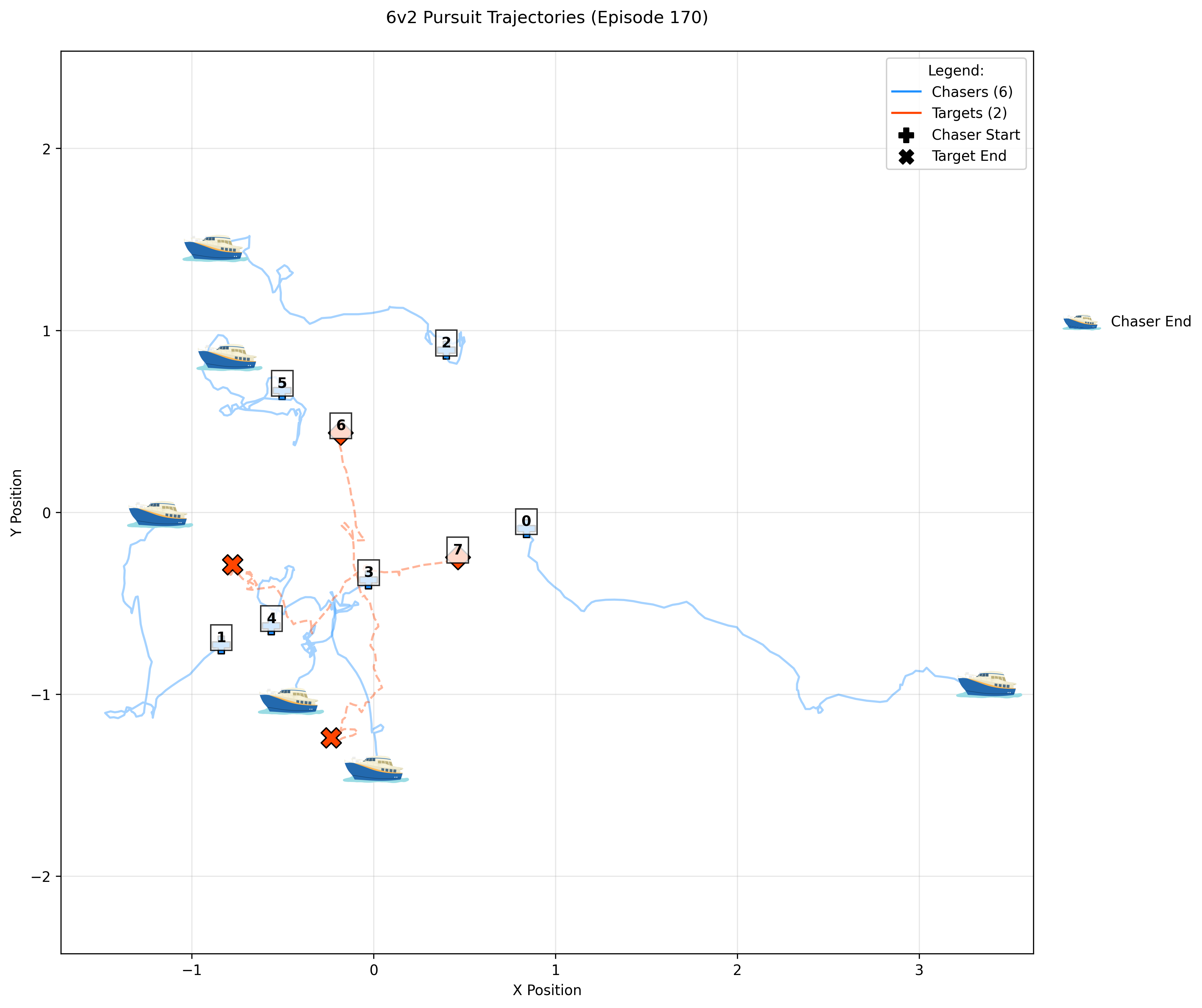
return np.concatenate([agent.state.p_vel] + [agent.state.p_pos] + entity_pos + other_pos + other_vel)10.效果图(后续再补充)
实验配置:
6围捕2,障碍物:2
--num-episodes 20000 --max-episode-len 25 --lr 5e-5,其余默认