基本指标
- GT:Ground Truth是指真实的标签或真实的对象
- TP:真正(True Positive)是指被模型预测为正的正样本
- TN:真负(True Negative)是指被模型预测为负的负样本。
- FP:假正(False Positive)是指被模型预测为正的负样本,也称为误检。
- FN:假负(FALSE Negative)是指被模型预测为负的正样本,也称为漏检。
- Accuracy:准确度是分类正确的例子占总数的比例:
Accuracy = (TP + TN) / (TP + FN + FP + FN)
- Precision:精确度是指被分类器判定的正例中真正的正例样本的比重:
Precision = TP / (TP + FP)
- Recall:召回率是指被分类器正确判定的正例占总的正例的比重:
Recall = TP / (TP + FN
评价指标
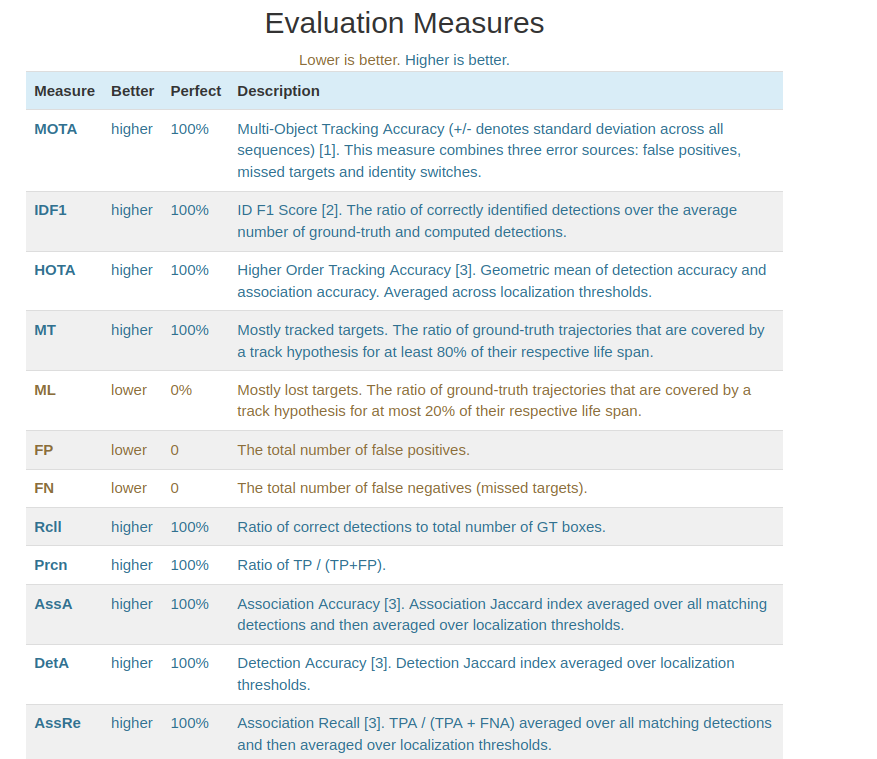

1. MOTA(Multiple Object Tracking Accuracy)
多目标跟踪任务中最常用的一个综合评价指标。
FN为False Negative,FP为False Positve,IDSW为ID Switch,即ID切换次数,GT是Ground Truth,表示的是物体的数量。
MOTA能非常直观地衡量跟踪器在检测物体和保持轨迹时的性能,与目标检测精度无关。它的取值一般小于1,当跟踪器产生的错误超过了场景中的物体时,MOTA就会变为负数
2. MOTP(Multiple Object Tracking Precision)
衡量跟踪的位置误差,其中t表示第t帧, c_t表示第t帧中预测轨迹和GT轨迹成功匹配上的数目, d_ti表示t帧中第i个匹配对的距离。
如果是通过IOU度量,那么MOTP是越大越好,但如果使用欧氏距离进行度量,那么MOTP就越小越好.
MOTP这个指标相比于评估跟踪效果,更注重检测质量。

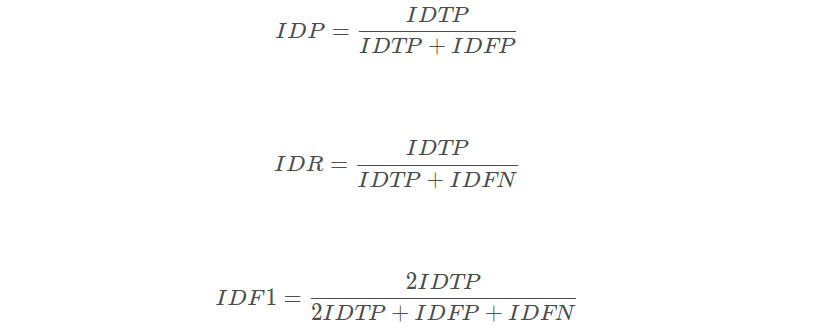
3. IDF1(ID F1 Score)
是评估多目标跟踪算法在跟踪对象身份方面的准确性 的指标。它综合考虑了检测和关联的准确性,以衡量正确关联目标所产生的F1分数。
IDP其实就是ID+Precision,这里的IDP其实就是把每个ID当作单独的一类去计算Precision,同理,IDR则对应ID+Recall,IDF1则对应ID+F1 score
4. FN(False Negatives)
漏检数,即未被跟踪算法检测到的真实目标数量。FN越低,说明漏检率越低。
5. FP(False Positives)
假阳性数,即被跟踪算法错误地分配给不存在的目标的数量。FP越低,说明假阳性率越低。
6. MT(Mostly Tracked)
成功跟踪的帧数占总帧数的80%以上的GT轨迹数量
7. ML(Mostly Lost)
成功跟踪的帧数占总帧数的20%以下的GT轨迹数量
8. Fragments
碎片轨迹的数量
相关数据集
MOTChallenge,MOT15/16/17/20等, 2D MOT
自动驾驶数据集,包括 KITTI,nuScenes,Waymo Open Dataset
前沿论文网站
paperwithcode: 3D Multi-Object Tracking
paper
多目标跟踪-PaperReding_you only need two detectors to achieve multi-modal-CSDN博客
视觉雷达融合的多目标跟踪论文汇总_strongfusionmot: a multi-object tracking method ba-CSDN博客
多目标跟踪MOT技术总结(持续更新)_目标跟踪mota对比-CSDN博客