一、状态机思想介绍
状态机是一种用于描述系统行为的形式化模型,它将系统抽象为有限的状态 ,并通过状态转移 来响应外部输入或事件。其核心思想是:系统在任何时刻只处于一个确定的状态,且在不同状态之间按规则切换。状态机是处理明确、离散状态转换问题的利器,适合任何需要结构化行为模型的场景。
1.1 状态机核心概念
(1)状态(State)
表示系统所处的某种模式或条件。例如:
-
红绿灯的「红灯」「绿灯」「黄灯」。
-
门的「打开」「关闭」「锁定」。
(2)事件(Event)
触发状态转移的输入或动作。例如:
-
按下按钮(事件)使门从「锁定」转移到「打开」。
-
定时器超时(事件)使红绿灯从「绿灯」转移到「黄灯」。
(3)转移(Transition)
定义状态如何因事件而改变。通常表示为:
- 当前状态 + 事件 → 执行动作 + 下一状态。
(4)动作(Action)
在状态转移时执行的操作(可选)。例如:
- 进入「红灯」状态时启动倒计时。
1.2 状态机类型
(1)有限状态机(FSM)
-
状态数量有限。
-
分为两类:
-
Moore型:输出仅依赖当前状态。
-
Mealy型:输出依赖当前状态和输入事件。
(2)分层状态机(HFSM)
-
状态可以嵌套子状态,简化复杂逻辑。
-
例如:汽车「行驶」状态包含「加速」「巡航」等子状态。
(3)并发状态机
- 多个状态机并行运行,独立处理不同事件。
1.3 状态机应用场景
(1)嵌入式系统:电梯控制、交通灯管理。
(2)游戏开发:NPC行为逻辑(如「巡逻→攻击→逃跑」)。
(3)网络协议:TCP连接状态(建立、传输、关闭)。
(4)用户界面:页面跳转逻辑(如登录流程)。
以红绿灯来进行简单示例:
状态:红灯、黄灯、绿灯
事件:定时器超时
转移规则:
1. 红灯 →(超时)→ 绿灯
2. 绿灯 →(超时)→ 黄灯
3. 黄灯 →(超时)→ 红灯1.4 状态机的优点
(1)逻辑清晰:将复杂行为分解为离散状态。
(2)易于扩展:新增状态或事件不影响其他部分。
(3)可维护性:状态隔离,便于调试。
二、利用状态机思想点亮流水灯
2.1 设计思路
定义4个状态(S0, S1, S2, S3),每个状态对应点亮一个LED。定时器每0.5秒切换一次状态(假设FPGA时钟为50MHz,定时器计数25,000,000次),然后设置异步复位,初始状态为S0。
2.2 代码演示
verilog流水灯代码:
sql
module LED(
input wire clk, // 50MHz时钟
input wire reset_n, // 异步低电平复位
output reg [3:0] leds // 4个LED(低电平点亮)
);
// 状态定义
localparam S0 = 2'b00;
localparam S1 = 2'b01;
localparam S2 = 2'b10;
localparam S3 = 2'b11;
reg [1:0] current_state; // 当前状态
reg [1:0] next_state; // 下一状态
reg [24:0] counter; // 定时器计数器(25MHz计数)
// 状态转移逻辑
always @(posedge clk or negedge reset_n) begin
if (!reset_n) begin
current_state <= S0;
counter <= 0;
end else begin
// 定时器计数
if (counter >= 25_000_000 - 1) begin
counter <= 0;
current_state <= next_state;
end else begin
counter <= counter + 1;
end
end
end
// 下一状态逻辑
always @(*) begin
case (current_state)
S0: next_state = S1;
S1: next_state = S2;
S2: next_state = S3;
S3: next_state = S0;
default: next_state = S0;
endcase
end
// 输出逻辑(Moore型:输出仅依赖状态)
always @(*) begin
case (current_state)
S0: leds = 4'b1110; // LED0亮
S1: leds = 4'b1101; // LED1亮
S2: leds = 4'b1011; // LED2亮
S3: leds = 4'b0111; // LED3亮
default: leds = 4'b1111;
endcase
end
endmodule测试代码:
sql
`timescale 1ns / 1ps
module LED_tb;
// 输入信号
reg clk;
reg reset_n;
// 输出信号
wire [3:0] leds;
// 实例化被测模块
LED uut (
.clk(clk),
.reset_n(reset_n),
.leds(leds)
);
// 时钟生成(50MHz)
initial begin
clk = 0;
forever #10 clk = ~clk; // 20ns周期(50MHz)
end
// 复位和测试逻辑
initial begin
reset_n = 0; // 初始复位
#100 reset_n = 1; // 释放复位
// 仿真运行足够长时间(观察4个状态切换)
#200_000_000; // 200ms(实际需仿真更长时间)
$stop;
end
// 监控输出
initial begin
$monitor("Time = %t, State = %b, LEDs = %b", $time, uut.current_state, leds);
end
endmodule2.3 modesim仿真测试
2.3.1 仿真环境调试
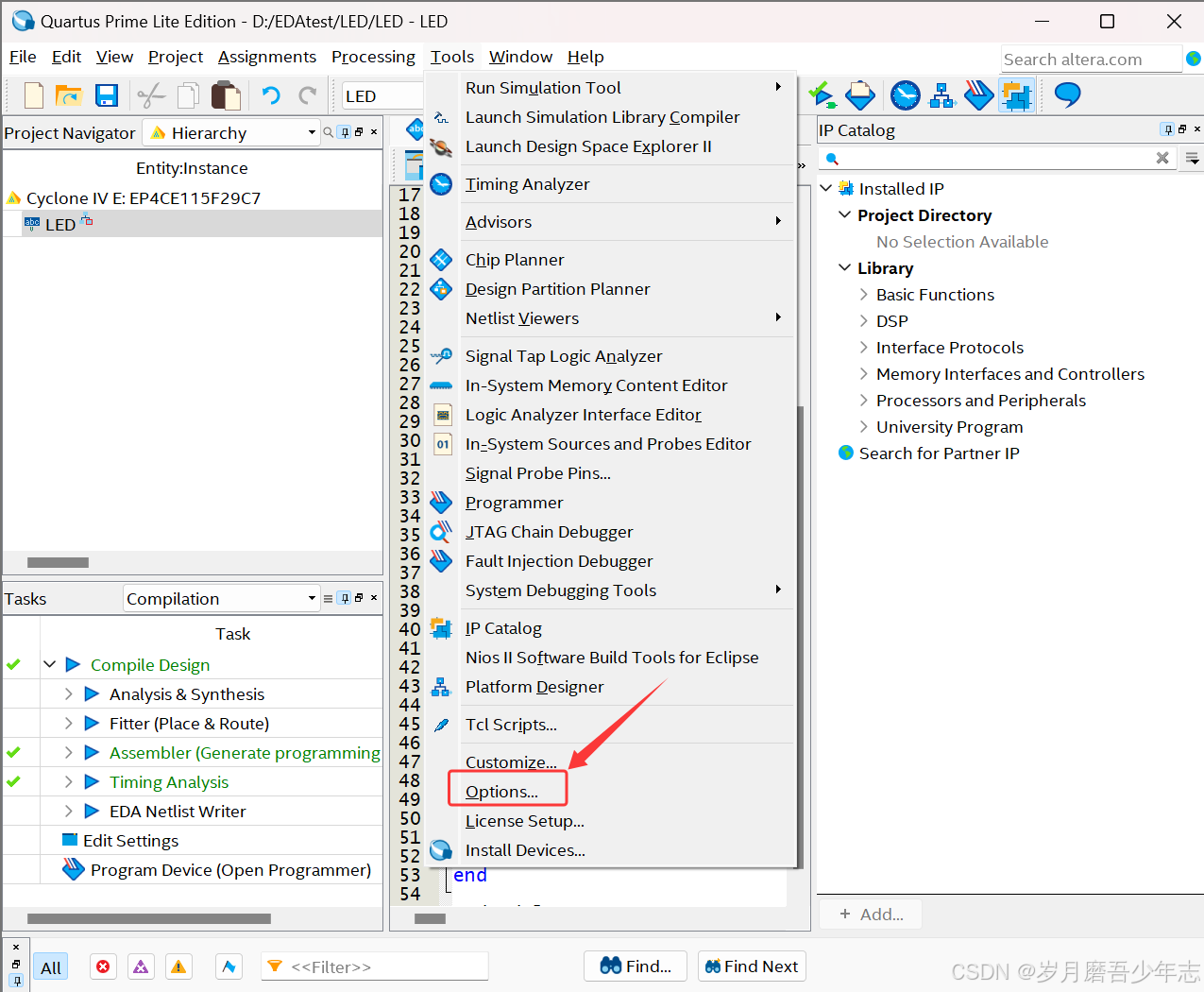
首先要指定仿真工具,找到Tools→Options→EDA Tool Options
点击Modesim Altera,确保路径指向安装目录(如C:\intelFPGA\modelsim_ase\win32aloem)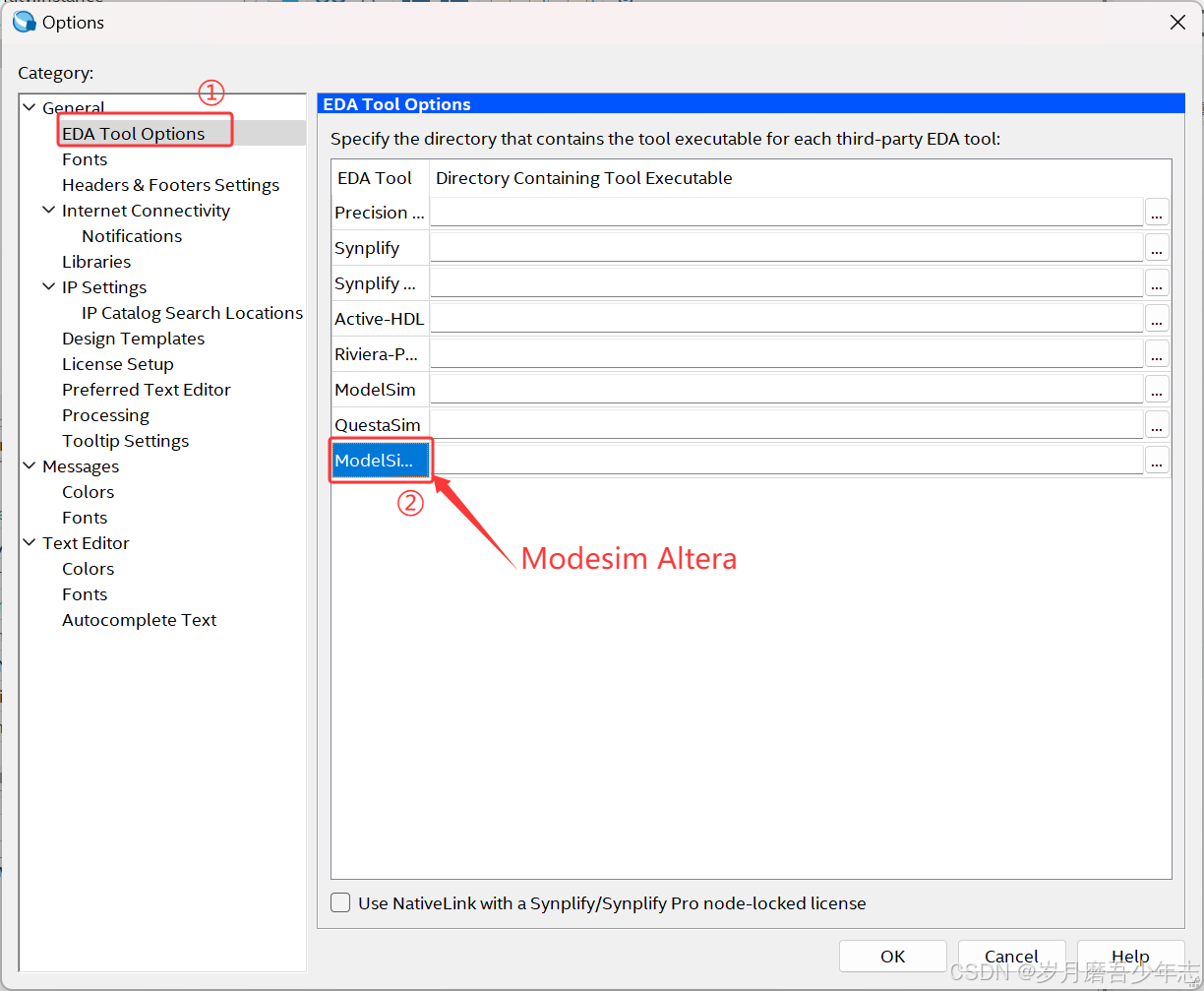
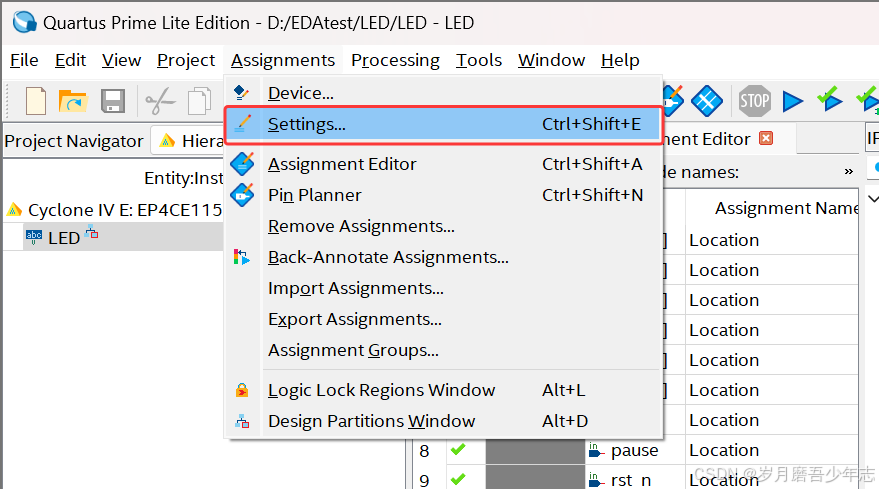
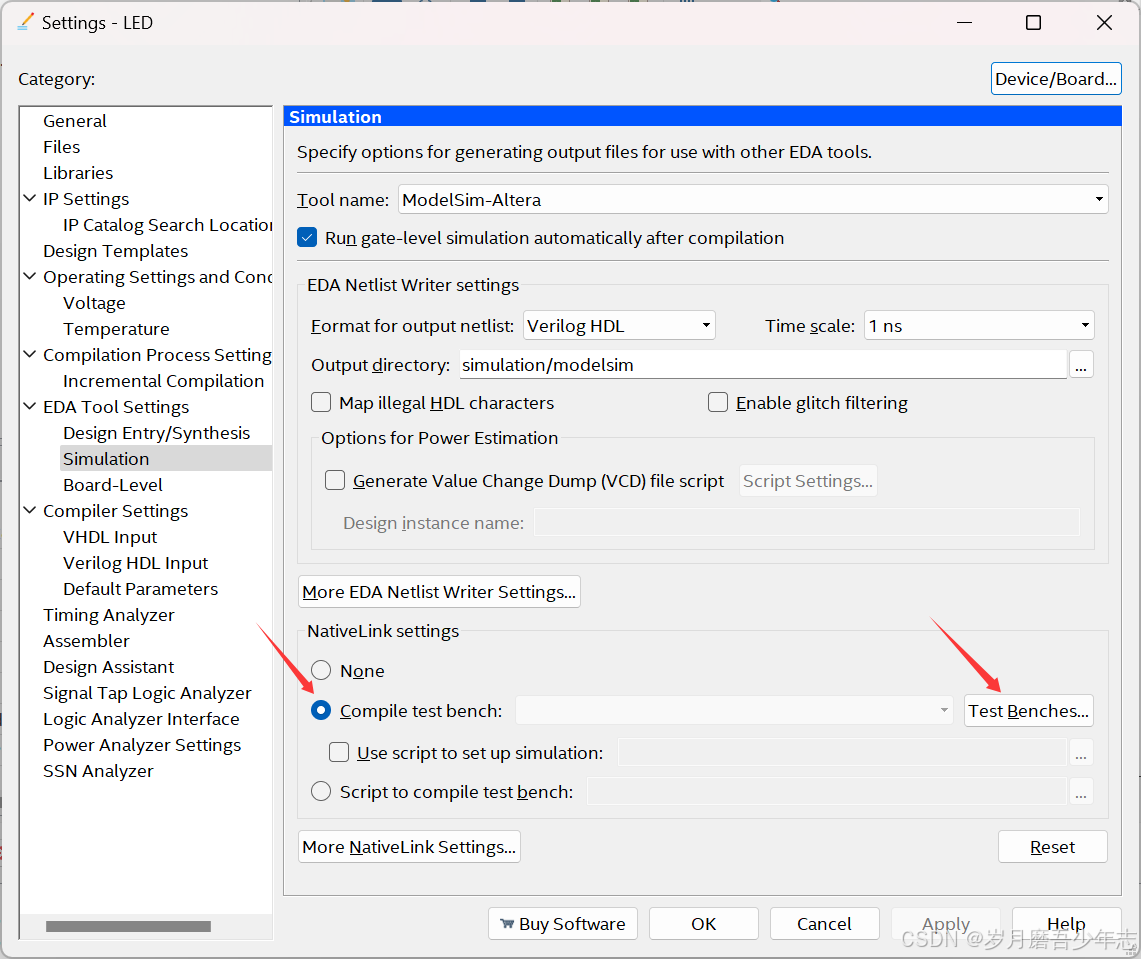
设置仿真参数,点击Assignments→Settings
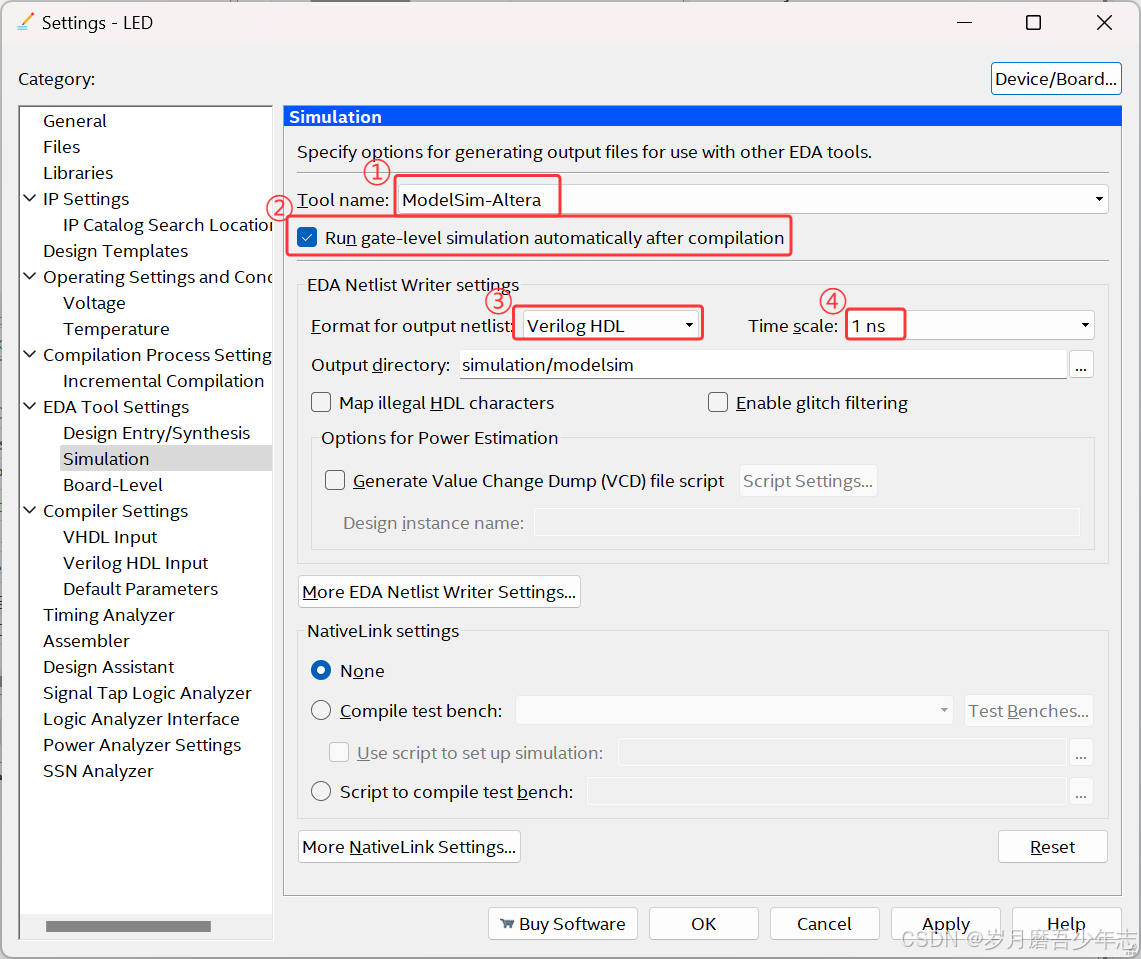
按下图依次进行修改
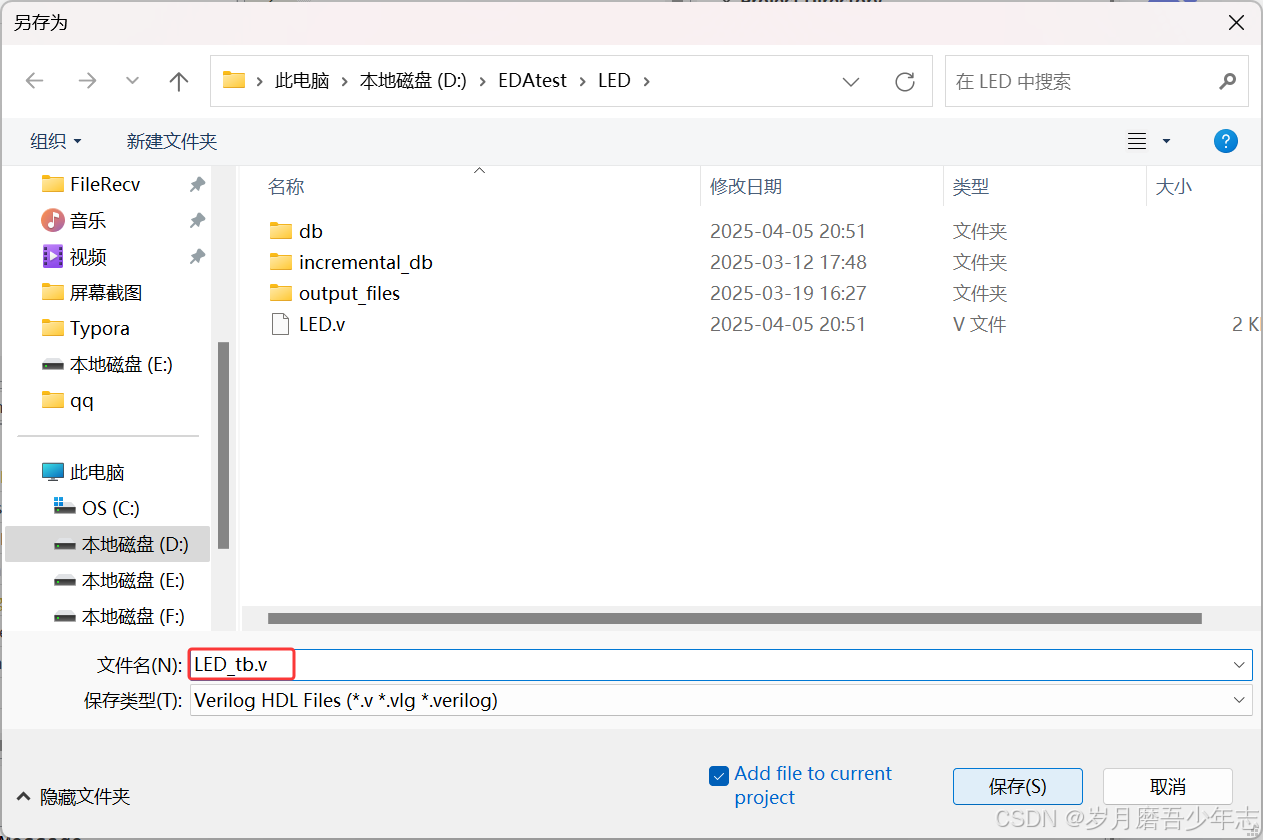
创建测试文件 LED_tb.v,将其放在工程根目录下(步骤和创建LED.v一致)
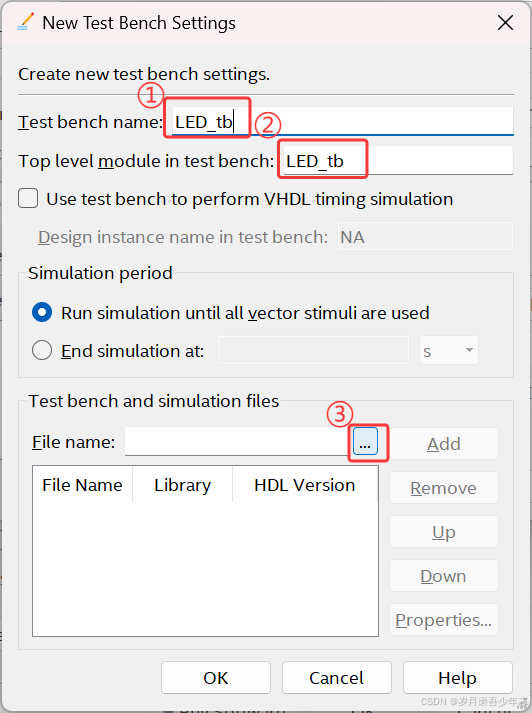
然后添加Testbench文件,点击Test Benches→New
按照下图步骤进行添加,注意Top level module in test bench中必须与Testbench模块名一致
然后点击LED_tb.v文件,Open然后Add即可关联测试文件到Quartus工程

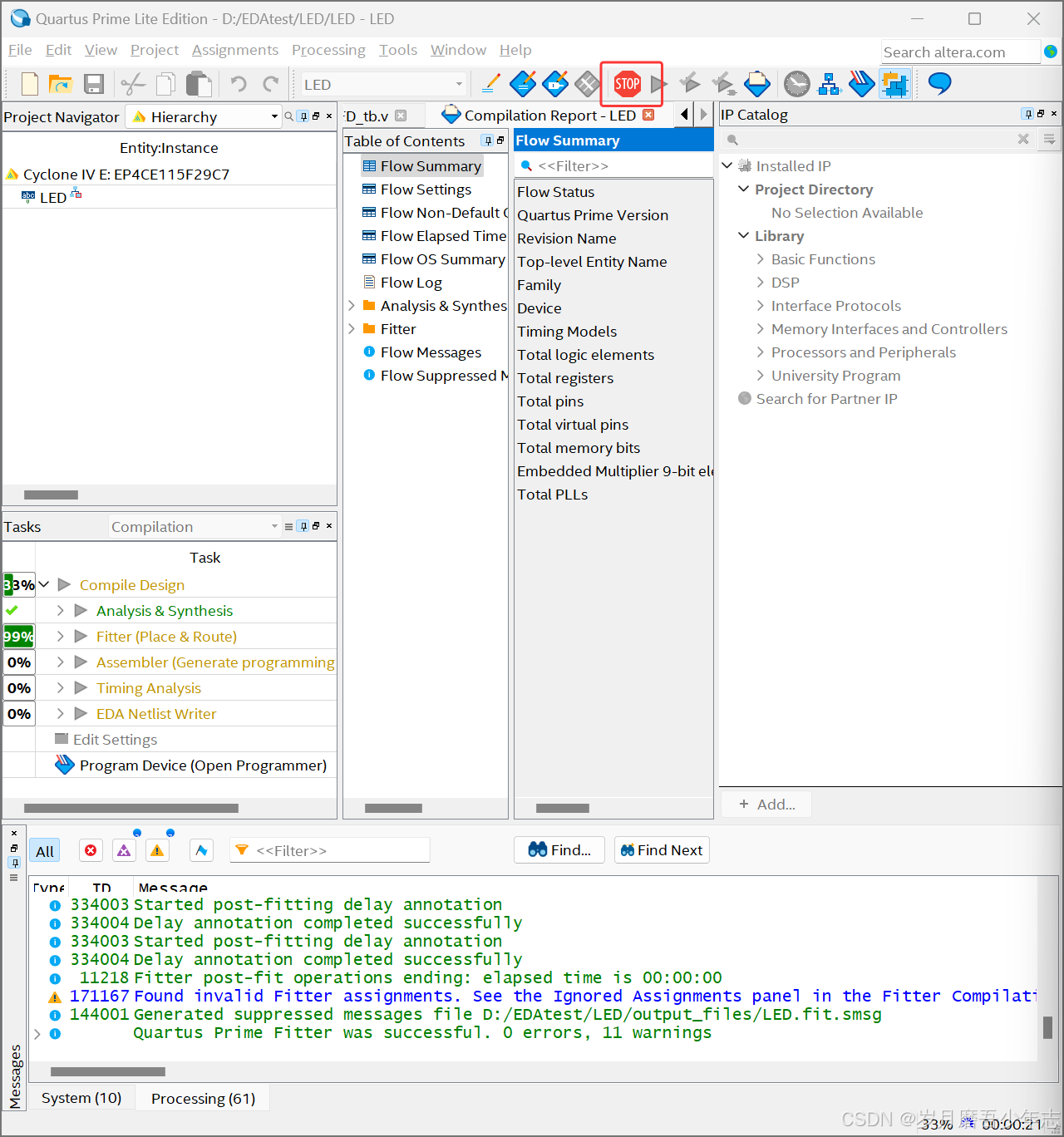
2.3.2 编译启动仿真
点击蓝色三角符号开始编译,编译成功后,Quartus会自动调用ModelSim并加载仿真文件。如果未自动启动,点击 Tools → Run Simulation Tool → RTL Simulation(功能仿真),ModelSim将打开并加载Testbench和设计文件。
(正在运行中)
生成波形图,可以看到信号变化情况(F可以观察全局波形,I可以放大细节区域)
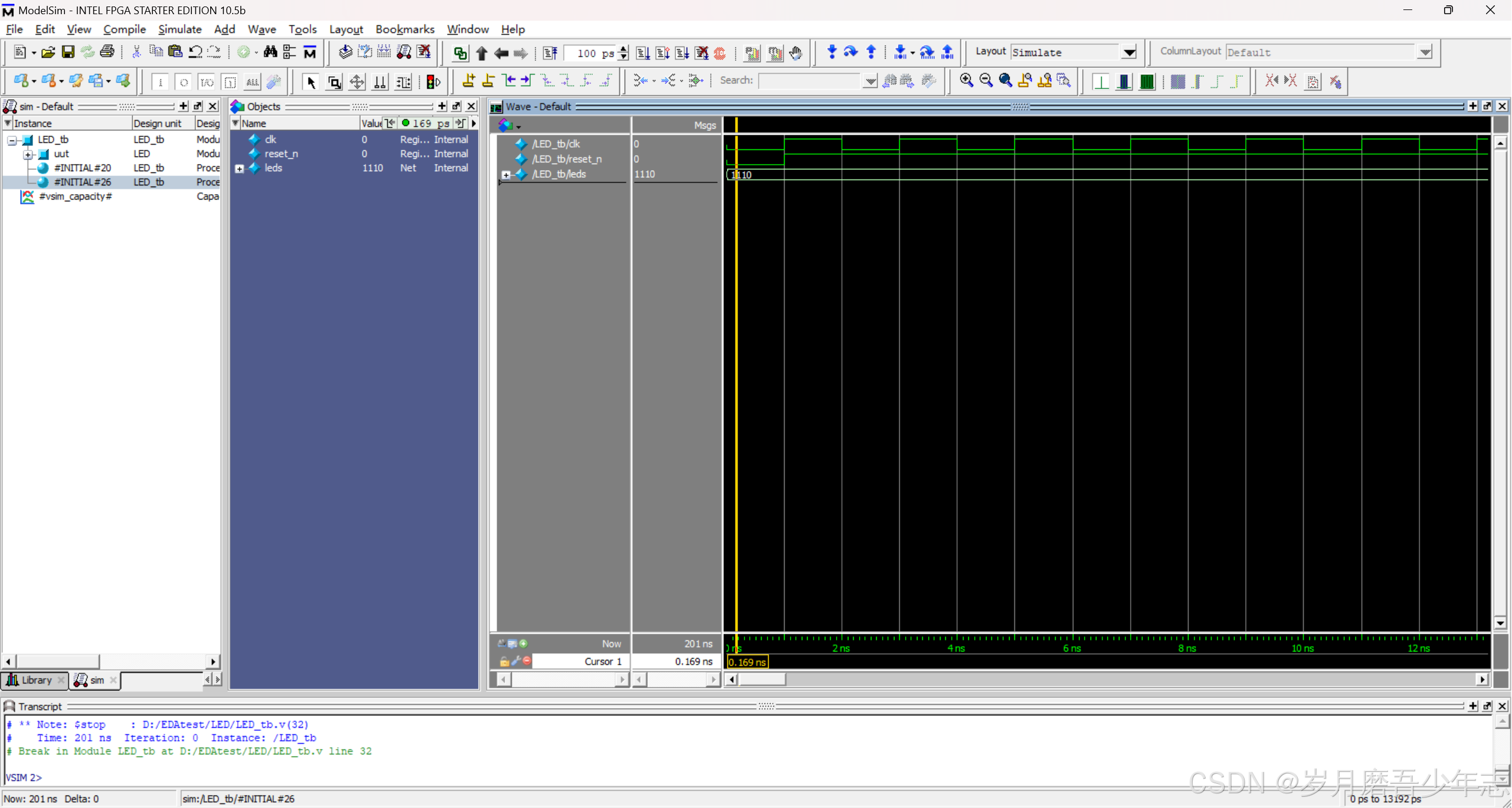
具体观察变化情况:
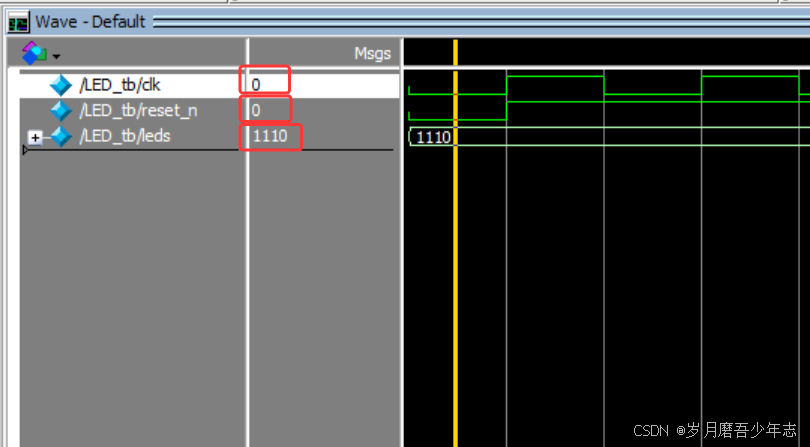 如上图,可以发现四个信号的变化情况:
如上图,可以发现四个信号的变化情况:
-
时钟(clk):确认频率为50MHz(周期20ns)。
-
复位(reset_n):前100ns为低电平,之后拉高。
-
状态(current_state):每0.5秒(25,000,000个时钟周期)切换一次。
-
LED输出(leds):按1110→1101→1011→0111循环变化。
烧录结果:
状态机思想点亮流水灯
三、CPLD与FPGA芯片探索
3.1 CPLD芯片介绍
CPLD (Complex Programmable Logic Device,复杂可编程逻辑器件)是一种基于 可编程与或阵列(PAL/GAL结构) 的半定制集成电路,主要用于实现中小规模的数字逻辑功能。它介于简单PLD(如PAL、GAL)和FPGA之间,适合低复杂度、高确定性的控制场景。
3.1.1 CPLD的核心特点
| 特性 | 说明 |
|---|---|
| 架构 | 基于 乘积项(Product-Term)逻辑,由可编程与阵列和固定或阵列组成。逻辑块通过全局互联连接,延迟固定且可预测。 |
| 逻辑容量 | 较小(通常等效 几十到几千个逻辑门),适合简单控制逻辑。 |
| 非易失性 | 配置信息存储在 Flash或EEPROM 中,上电即运行,无需外部配置芯片。 |
| 低功耗 | 静态功耗极低,适合电池供电设备。 |
| 高可靠性 | 抗干扰能力强,适用于工业环境。 |
| 快速响应 | 信号传输延迟固定(纳秒级),适合实时控制。 |
3.1.2 CPLD的典型应用
(1) 胶合逻辑(Glue Logic)
-
替代传统的 74系列逻辑芯片 ,实现电平转换、信号整形、总线仲裁等。
示例:-
连接不同电压的MCU和传感器(如3.3V ↔ 5V转换)。
-
扩展I/O口(如用CPLD实现多路复用)。
-
(2) 状态机与控制逻辑
-
实现 确定性高的控制逻辑 ,如电机驱动、电源管理、按键扫描等。
示例:-
工业PLC的IO控制模块。
-
智能家居设备的按键防抖逻辑。
-
(3) 接口协议转换
-
桥接不同通信协议(如UART转SPI、I2C主从切换)。
示例:- 将并行总线转换为串行LVDS信号。
(4) 低功耗设备
-
因 上电即运行 且 静态功耗低 ,常用于便携设备。
示例:-
智能手表的电源管理。
-
无线传感器网络的唤醒控制。
-
3.2 CPLD与FPGA芯片区别与适用场景分析
CPLD和FPGA(现场可编程门阵列)是两种主流的可编程逻辑器件,尽管功能相似,但在架构、性能和应用场景上存在显著差异。
3.2.1 主要技术区别
| 特性 | CPLD | FPGA |
|---|---|---|
| 架构 | 基于 乘积项(PAL/GAL结构),逻辑块通过全局互联连接 | 基于 查找表(LUT)+ 寄存器,逻辑单元阵列通过可编程互联矩阵连接 |
| 逻辑容量 | 较小(通常几百到几千逻辑门) | 较大(数万到数百万逻辑门,支持复杂设计) |
| 时序特性 | 固定延迟(确定性高),适合同步逻辑 | 延迟可变(依赖布线),需时序约束优化 |
| 存储资源 | 少量嵌入式存储(如触发器) | 丰富(Block RAM、分布式RAM) |
| DSP/算术能力 | 弱(依赖逻辑单元实现) | 强(内置DSP硬核、乘法器) |
| 功耗 | 静态功耗低,适合低功耗设计 | 动态功耗高,需优化设计 |
| 配置方式 | 非易失性(EEPROM/Flash,上电即运行) | 易失性(SRAM,需外挂配置芯片) |
| 灵活性 | 逻辑固定,适合简单控制逻辑 | 高度灵活,支持动态重构 |
3.2.2 两者适用场景
1. CPLD的典型应用
-
简单控制逻辑
地址译码、总线接口、状态机控制(如PCI接口协议转换)。
-
实时性要求高的场景
工业控制(PLC)、电机驱动(因固定延迟,响应时间可预测)。
-
低功耗与即时启动
便携设备、电源管理(上电无需配置,静态功耗低)。
-
胶合逻辑(Glue Logic)
连接不同标准的芯片(如电平转换、信号整形)。
示例:键盘扫描电路、电源时序控制、老式硬盘接口桥接
2. FPGA的典型应用
-
高性能并行处理
数字信号处理(DSP)、图像处理(如摄像头ISP流水线)。
-
复杂算法加速
机器学习推理、加密解密(利用DSP硬核和并行计算)。
-
可重构计算
通信协议栈(5G PHY层)、软件定义无线电(SDR)。
-
原型验证与ASIC替代
芯片流片前的功能验证(如SoC原型开发)。
示例:自动驾驶的传感器融合、高速数据采集卡(ADC/DAC接口)、区块链矿机
3.2.3 选择建议
| 场景 | 推荐器件 | 理由 |
|---|---|---|
| 需要即时启动、低功耗控制 | CPLD | 非易失性,静态功耗低 |
| 简单逻辑整合(替换多颗74芯片) | CPLD | 成本低,开发周期短 |
| 高速数据流处理(>100MHz) | FPGA | 并行架构,支持流水线优化 |
| 需要动态重构功能 | FPGA | 可运行时重新配置逻辑 |
| 复杂算法(FFT、卷积) | FPGA | 内置DSP硬核,计算效率高 |
3.2.4 关键总结
CPLD:
优势:确定性延迟、低功耗、即时启动。
局限:逻辑规模小,缺乏硬核IP。
FPGA:
优势:高灵活性、大容量、支持复杂算法。
局限:功耗高,需外挂配置芯片,成本较高。
而且随着工艺进步,FPGA逐渐集成CPLD的特性(如Intel MAX 10系列融合Flash配置功能),而CPLD市场被低端FPGA挤压,但在特定场景仍不可替代。
四、hdlbits网站练习组合逻辑题目
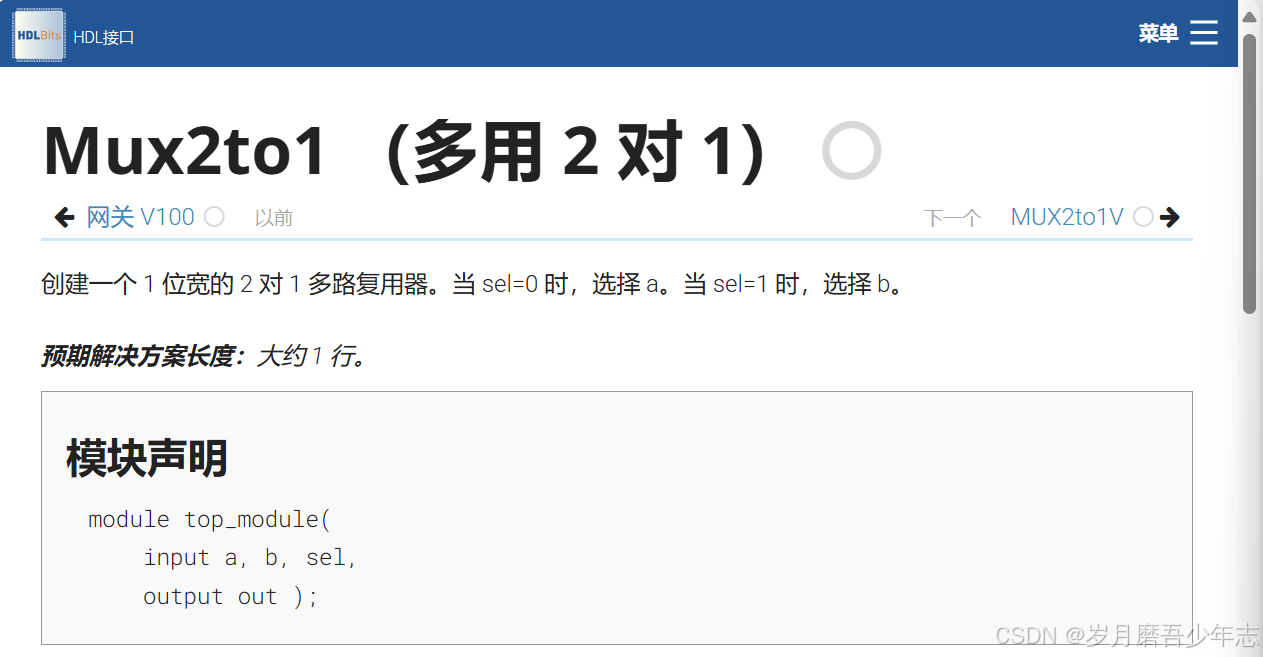
4.1 2选1多路复用器(MUX)
1位宽 2选1多路复用器(MUX)是数字电路中最基础的逻辑单元之一,其核心功能是 根据选择信号(sel)从两个输入(a和b)中选择一个输出。它的作用可以类比为一个"数据开关"
问题描述:
 解决方案:
解决方案:
module top_module(
input a,
input b,
input sel,
output out
);
assign out = sel ? b : a; // 三元运算符实现
endmodule说明: sel ?b:a;是条件运算符,等价于 if - else 的逻辑,这是最简洁的组合逻辑实现方式。
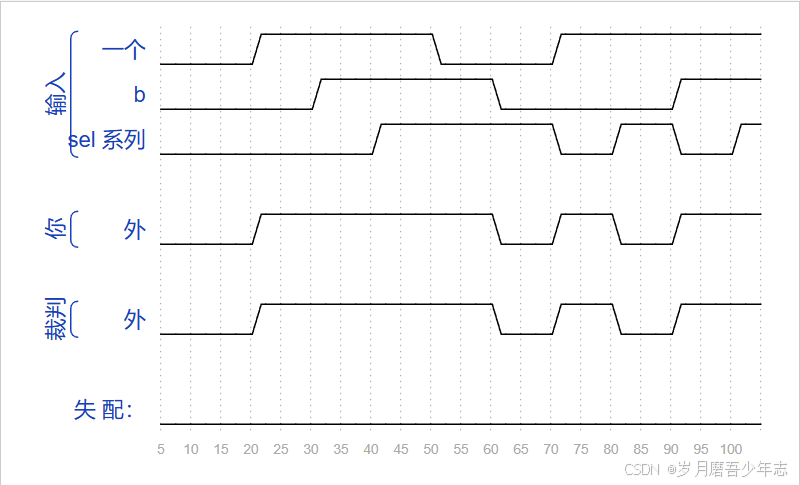
用于测试用例的时序图:Sel 在 a 和 b 之间进行选择
4.2 256:1 多路复用器
是2对1多路复用器的升级版
问题描述:
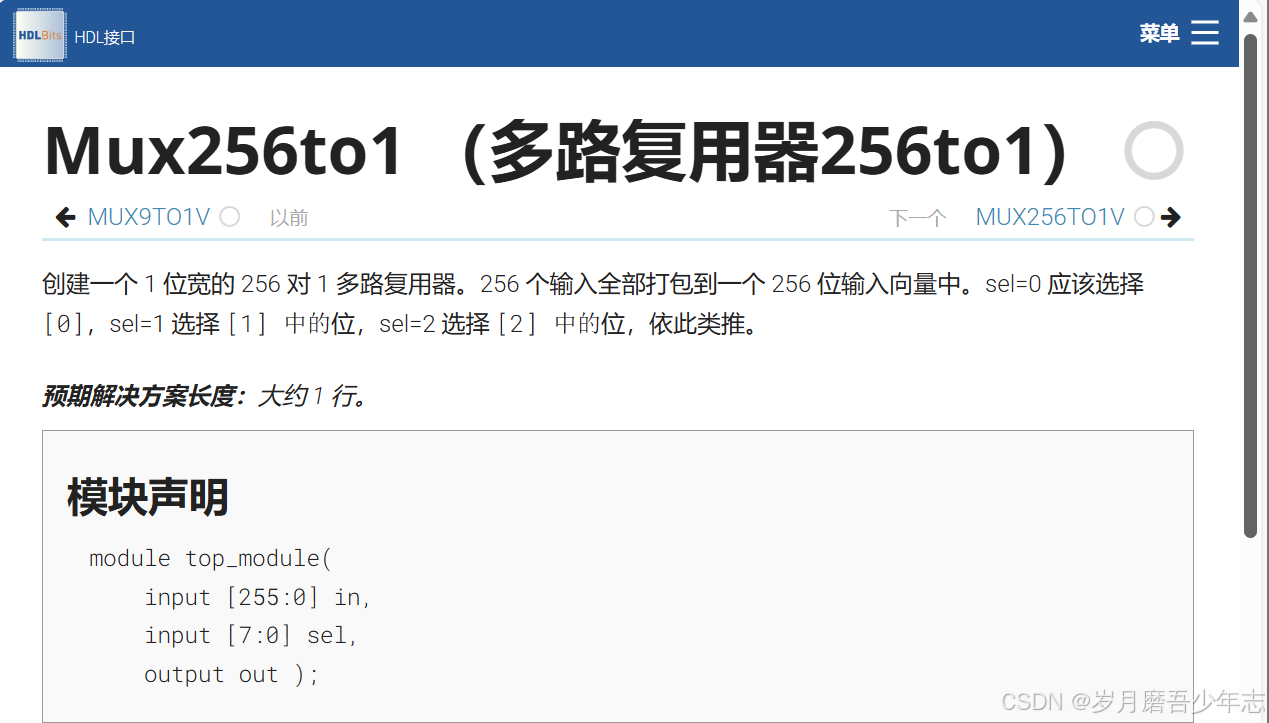
解决方案:
module top_module (
input [255:0] in,
input [7:0] sel,
output out
);
assign out = in[sel]; // 直接使用 sel 作为索引
endmodule说明:in[sel] 表示从 in 向量中选择第 sel 位的值,这是最简洁、高效的方式,综合工具会自动优化为多路复用逻辑。
4.3 半加器设计
半加器是数字电路中最基础的算术单元,其核心逻辑是:
-
和(sum)= a ^ b( 由 1 个异或门 实现**)**
-
进位(cout)=a & b( 由 1 个与门 实现**)**
真值表:
a |
b |
sum |
cout |
|---|---|---|---|
| 0 | 0 | 0 | 0 |
| 0 | 1 | 1 | 0 |
| 1 | 0 | 1 | 0 |
| 1 | 1 | 0 | 1 |
问题描述: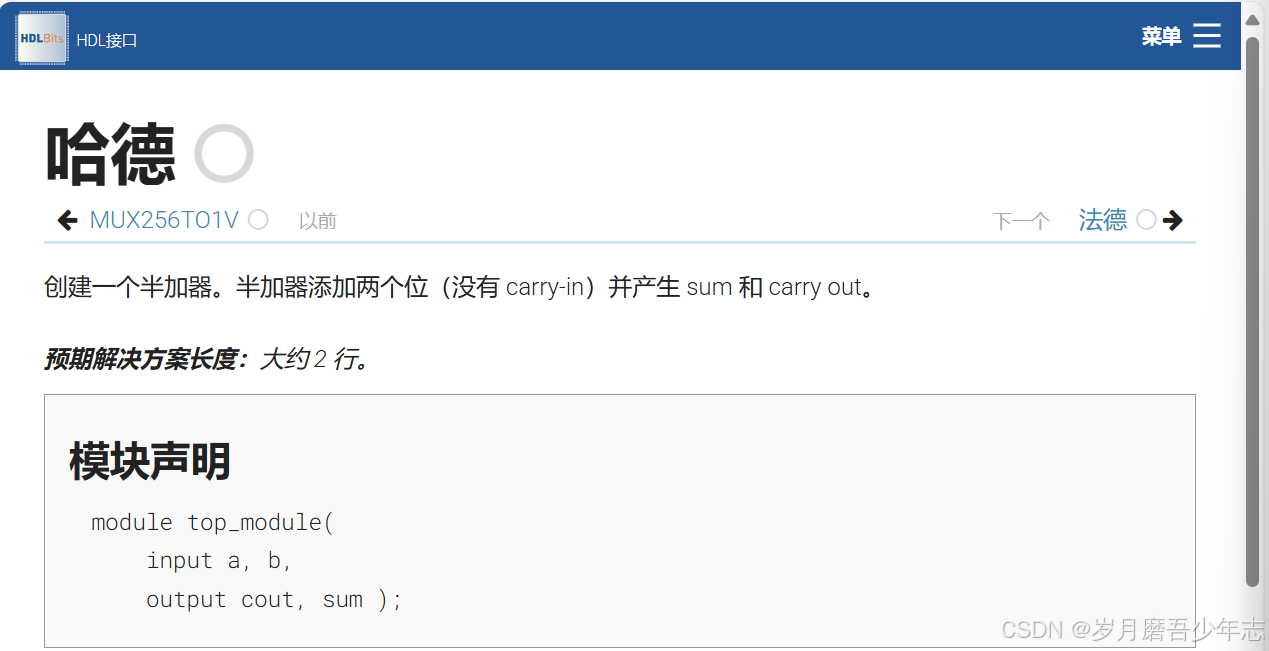
解决方案:
module top_module (
input a, b,
output sum, cout
);
assign sum = a ^ b; // 异或:本位和
assign cout = a & b; // 与:进位
endmodule掌握半加器后,可以进一步学习 全加器(Full Adder) 和 多位加法器(Ripple Carry Adder)。
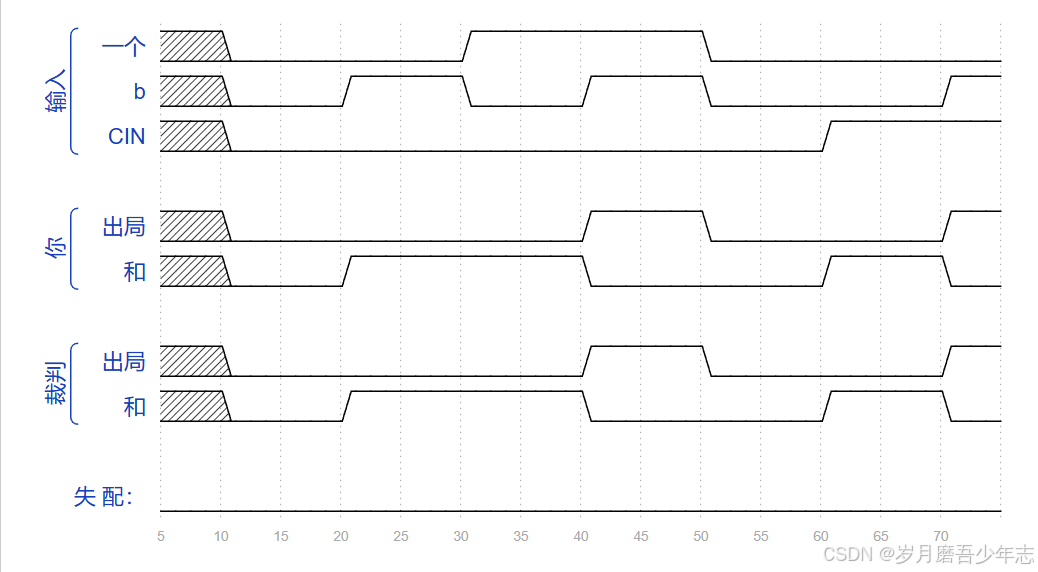
4.4 全加器设计
全加器将两个1位二进制数和一个进位输入相加,产生和(sum)和进位输出(carry out)。
问题描述:
 解决方案:
解决方案:
module top_module(
input a, b, cin,
output cout, sum );
// 全加器实现
assign sum = a ^ b ^ cin; // 和的计算
assign cout = (a & b) | (a & cin) | (b & cin); // 进位输出的计算
endmodule说明:
-
输入端口:
a: 第一个1位加数b: 第二个1位加数cin: 进位输入 -
输出端口:
sum: 和输出 (a + b + cin 的结果)cout: 进位输出 -
逻辑实现:
sum使用异或(XOR)运算计算,因为当奇数个输入为1时结果为1cout使用或(OR)运算组合三种可能的进位情况:a和b都为1、a和cin都为1、b和cin都为1
测试用例的时序图:
4.5 4位BCD加法器
这个加法器可以处理两个4位BCD数字(每个数字0-9,共16位输入)和一个进位输入,产生4位BCD和和进位输出。
问题描述:
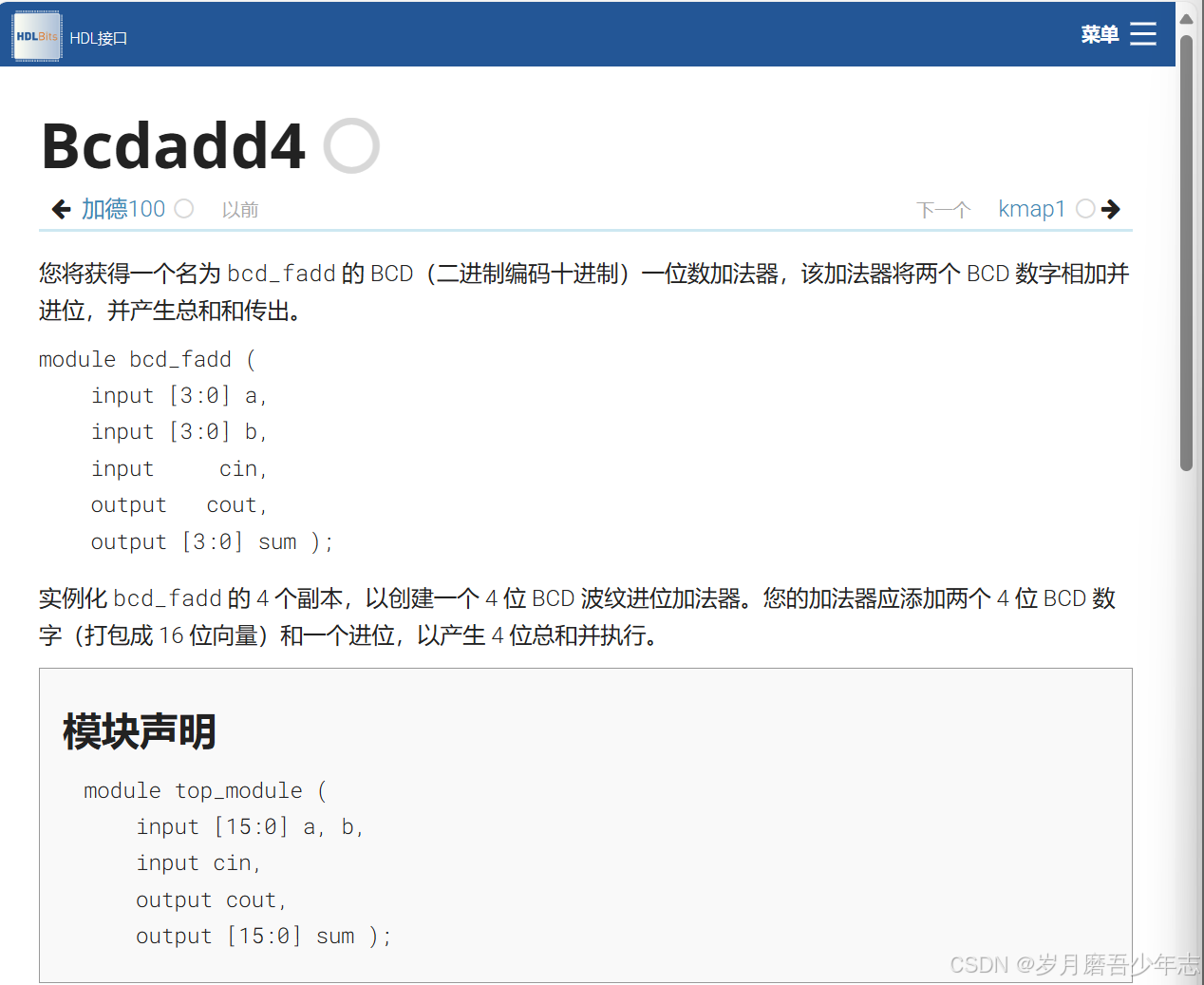
解决方案:
module top_module(
input [15:0] a, b,
input cin,
output cout,
output [15:0] sum );
// 定义中间进位信号
wire c1, c2, c3;
// 实例化4个bcd_fadd模块,形成波纹进位链
bcd_fadd add0 (
.a(a[3:0]),
.b(b[3:0]),
.cin(cin),
.cout(c1),
.sum(sum[3:0])
);
bcd_fadd add1 (
.a(a[7:4]),
.b(b[7:4]),
.cin(c1),
.cout(c2),
.sum(sum[7:4])
);
bcd_fadd add2 (
.a(a[11:8]),
.b(b[11:8]),
.cin(c2),
.cout(c3),
.sum(sum[11:8])
);
bcd_fadd add3 (
.a(a[15:12]),
.b(b[15:12]),
.cin(c3),
.cout(cout),
.sum(sum[15:12])
);
endmodule说明(工作原理):
·最低位BCD加法器(add0)接收cin作为进位输入
·每个加法器的进位输出连接到下一个高位加法器的进位输入
·最高位BCD加法器(add3)的进位输出作为整个模块的cout
·每个加法器产生的4位和组合成最终的16位sum输出
测试用例的时序图:
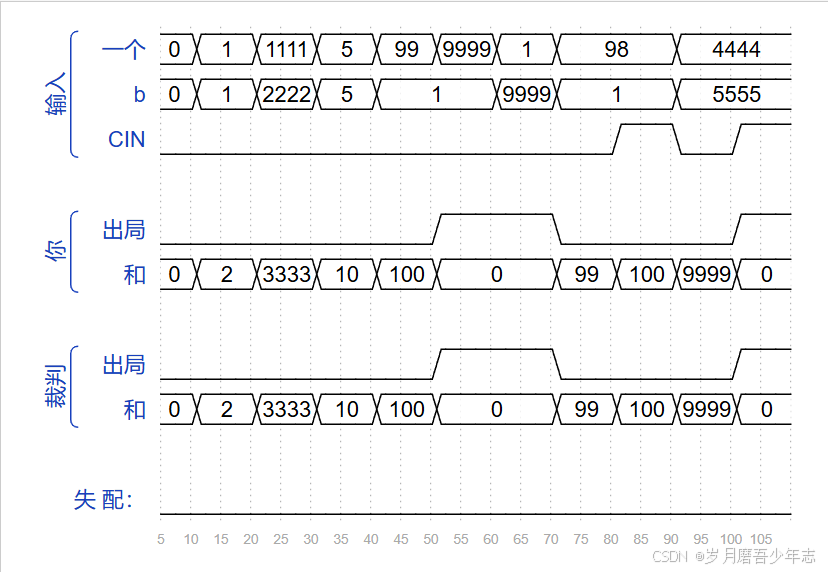
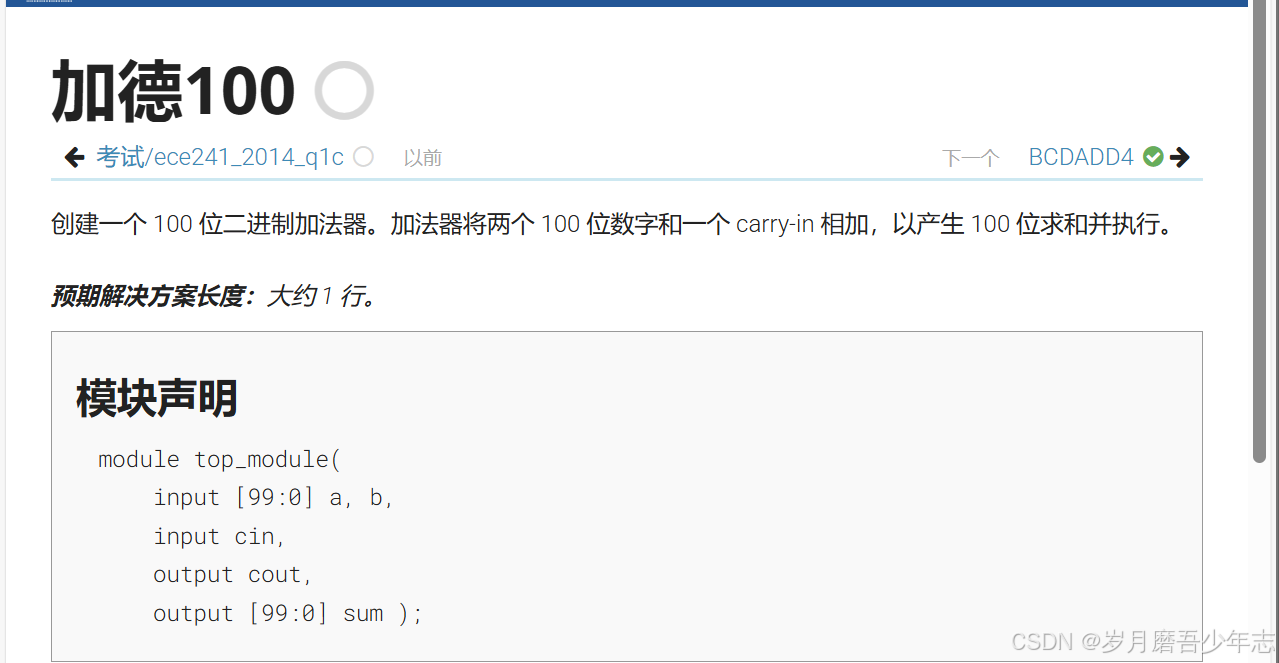
4.6 100位二进制加法器
使用波纹进位(Ripple Carry)结构,该加法器将两个100位二进制数和一个进位输入相加,产生100位和和一个进位输出。
问题描述:
解决方案:
module top_module(
input [99:0] a, b,
input cin,
output cout,
output [99:0] sum );
// 定义中间进位信号
wire [100:0] carry;
// 初始进位设为输入进位
assign carry[0] = cin;
// 生成100个全加器实例
genvar i;
generate
for (i = 0; i < 100; i = i + 1) begin : adder_chain
// 每个全加器实例
full_adder fa (
.a(a[i]),
.b(b[i]),
.cin(carry[i]),
.cout(carry[i+1]),
.sum(sum[i])
);
end
endgenerate
// 最终进位输出
assign cout = carry[100];
endmodule
// 全加器模块定义
module full_adder(
input a, b, cin,
output cout, sum
);
assign sum = a ^ b ^ cin;
assign cout = (a & b) | (a & cin) | (b & cin);
endmodule说明:
-
使用
generate语句创建100个全加器实例的链式结构 -
定义101位宽的进位信号
carry(包含初始进位和各级进位) -
每个全加器处理一位加法运算
-
进位信号从低位向高位传播(波纹进位)