
该代码实现了基于三维空间的动态目标TDOA定位,结合了Chan算法(解析解)与Taylor级数展开法(迭代优化)的双重优势。
文章目录
代码介绍
TDOA定位程序介绍
概述
本程序实现了一种基于到达时间差(TDOA)的三维定位方法,使用Chan和Taylor算法进行位置估计。程序通过模拟一个移动目标的运动轨迹,并利用多个基站的信号测量来估计目标位置。程序包括噪声影响的模拟以及不同定位算法的比较。
主要功能
- 初始化参数:设置基站数量、目标的初始和最终位置、总运动时间及噪声水平。
- 目标运动模拟:根据给定的初始和最终位置,模拟目标在三维空间中的匀速运动轨迹,并添加随机噪声。
- 位置估计 :
- 使用最小二乘法(LS)估计目标位置。
- 使用Chan算法进行初始位置估计。
- 使用Taylor迭代对Chan算法的结果进行优化。
- 误差计算:计算每种算法的估计位置与真实位置之间的误差,包括均方根误差(RMSE)。
- 结果可视化:绘制目标的真实轨迹、各算法的估计轨迹以及误差分析图。
代码结构
1. 参数初始化
- 定义基站数量、目标的初始和最终位置,以及运动的总时间和噪声水平。
- 随机生成基站的位置。
2. 运动轨迹模拟
- 根据初始位置和速度计算每个时间步的目标位置,并在每步中添加噪声。
3. 位置估计
- 对于每个时间步,计算目标到各基站的距离,并在此基础上进行位置估计。
- 使用LS、Chan和Taylor算法分别计算目标位置,并记录估计结果。
4. 误差计算
- 计算每种算法的估计误差,并求取RMSE以评估定位精度。
5. 绘图
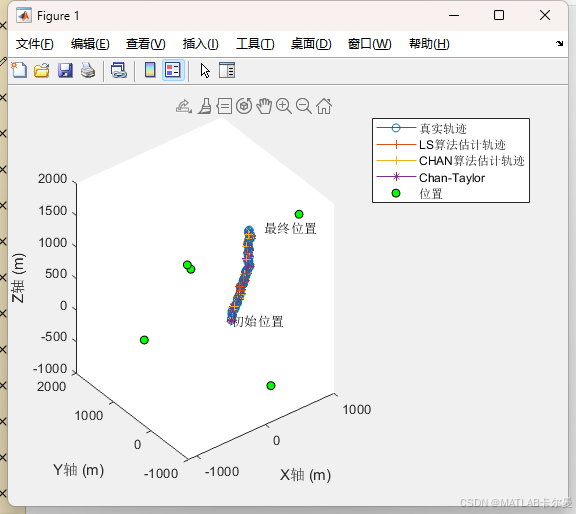
- 绘制三维轨迹图,展示真实运动轨迹与各算法的估计轨迹。
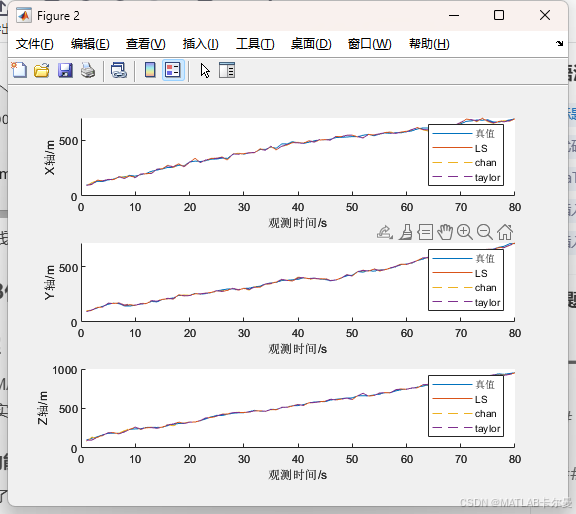
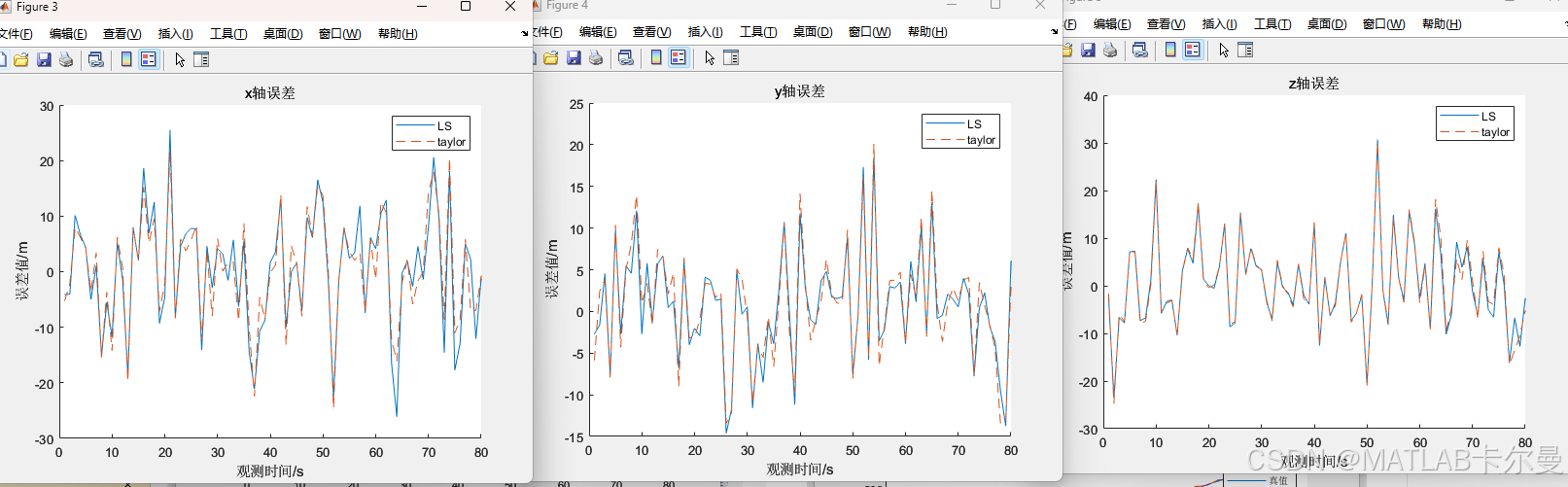
- 绘制每个坐标轴的误差变化图,以便分析不同算法在各轴上的性能。
结论
该程序通过模拟和比较不同的定位算法,展示了在TDOA定位中如何有效估计目标位置。使用Chan和Taylor算法的组合能够提高位置估计的精度,为实际应用提供了良好的基础。通过可视化结果,用户可以直观地了解不同算法在目标跟踪中的表现。
运行结果
定位示意图:
三轴状态曲线:
三轴误差曲线:
MATLAB代码
代码结构:
部分代码如下:
matlab
% TDOA,chan+Taylor程序,三维
% 2025-4-3/Ver1
clc;clear;close all;
rng(0);
noise = 10; %噪声
% 定义参数和物体运动轨迹
num_stations = 5; % 基站数量
initial_position = [100, 100, 100]; % 初始位置
final_position = [900, 700, 900]; % 最终位置
total_time = 80; % 总时间,单位秒
dt = 1; % 每秒钟采样一次
% 计算速度
velocity = (final_position - initial_position) / total_time;
% 固定基站位置
stations_position = 500 * randn(num_stations,3);
% 初始化轨迹数组
positions = zeros(total_time, 3);
positions(1, :) = initial_position;
% 模拟物体运动轨迹
for t = 2:(total_time)
positions(t, :) = positions(t-1, :) + velocity * dt + 10*randn(1,3);
end
velocity_ = [zeros(1,3);diff(positions)];
% velocity_ = 20*ones(size(velocity_));
% 初始化估计位置数组
estimated_positions_chan = zeros(total_time, 3);
estimated_positions_taylor = zeros(total_time, 3);
estimated_positions_pf = zeros(total_time, 3);
estimated_positions_ctpf = zeros(total_time, 3); %chan+taylor+PF
estimated_positions_chan(1, :) = initial_position;
estimated_positions_taylor(1, :) = initial_position;
estimated_positions_pf(1, :) = initial_position;完整代码下载链接:
https://download.csdn.net/download/callmeup/90564753
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者