直接理解题意,一分钟扩散一次,那么2020分钟也就是需要循环2020次,然后加入扩散后的条件,每一个次扩散使方格子的总量+1(只要有一个点扩散就无需看其他的点),若干次循环过后总数之和即所有黑色格子进行计数的结果。

每次扩散相当于增加一层外围+4.
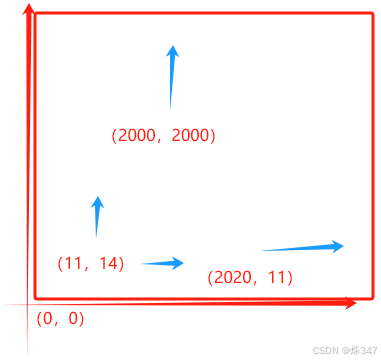
我们考虑其中重复的覆盖区域,只需要判断上方和右方取到的最大值,因为下方必定能被(0,0)扩散到。即0,0为下方和左方扩散的最大值。在此基础上加减2020即可得到最大的范围。
代码如下👇
public static void Kuosan() {
int[][] point = new int[][] {{0,0},{2020,11},{11,14},{2000,2000}};
long result = 0;
for (int i = -2050; i <= 4050; i++) {//最大和最右都分析过,这里多加点
for (int j = -2050; j <= 4050; j++) {
for (int k = 0; k < 4; k++) {//判断每个点
int x = point[k][0];
int y = point[k][1];
if (Math.abs(i - x) + Math.abs(j - y) <= 2020) {//判断是否在2020步内
result++;
break;
}
}
}
}
System.out.print(result);
}分开调用👇
static int[][] point = new int[][] {{0,0},{2020,11},{11,14},{2000,2000}};
public static void main(String[] args) {
Scanner scanner =new Scanner(System.in);
int result=0;
for (int i = -2050; i <= 4050; i++) {//最大和最右都分析过,这里多加点
for (int j = -2050; j <= 4050; j++) {
if (Kuosanl(i, j)) {
result++;
}
}
}
System.out.println(result);
scanner.close();
}
public static boolean Kuosanl(int x,int y) {
for (int[] xy:point) {//每次取一行,也就是判断一个黑点
if (Math.abs(x-xy[0])+Math.abs(y-xy[1])<=2020) {//0为x轴,1为y轴下标
return true;//只要满足说明已经扩散。直接返回
}
}
return false;
}