1.搭建文件目录,clone代码,编译
mkdir -p Lego_LOAM/src
cd Lego_LOAM/src
git clone https://github.com/RobustFieldAutonomyLab/LeGO-LOAM.git
cd ..
catkin_make -j1错误1:: fatal error: opencv/cv.h: 没有那个文件或目录
13 | #include <opencv/cv.h>
| ^~~~~~~~~~~~~
compilation terminated.

修改:20.04的openCV自带的是opencv4,所以需要将utility.h中的#include <opencv/cv.h>

CMakeLists.txt修改:

编译通过

2.准备数据集
3.刷新环境变量和运行roslaunch
source ./devel/setup.bash
roslaunch lego_loam run.launch4.运行数据集
在数据集目录下打开终端输入:
rosbag play <your bag name>.bag --clock --topic /velodyne_points /imu/data报错2:
将报错的话题复制在src/featureAssociation.cpp和mapOptmization.cpp的文件下CTRL+F查找,并且去掉"/"
如:
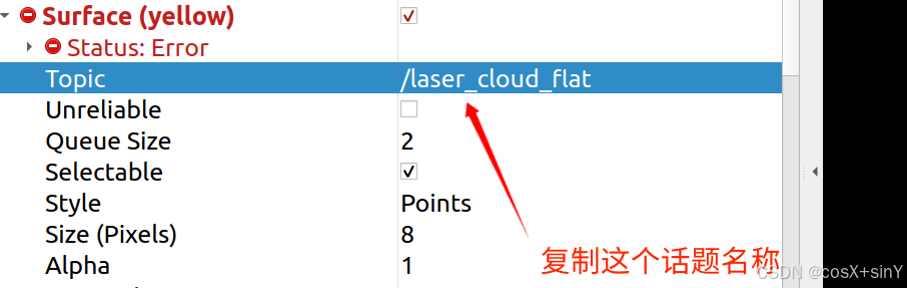
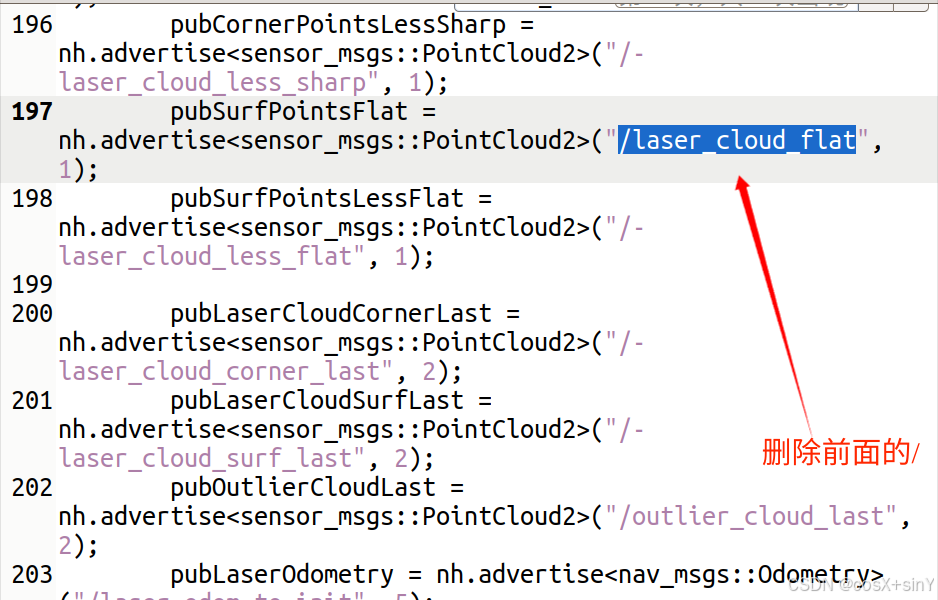
将其他五个的话题也这样修改,其中后面的两个在 mapOptmization.cpp中
再重新编译catkin_make下,运行launch,和bag包
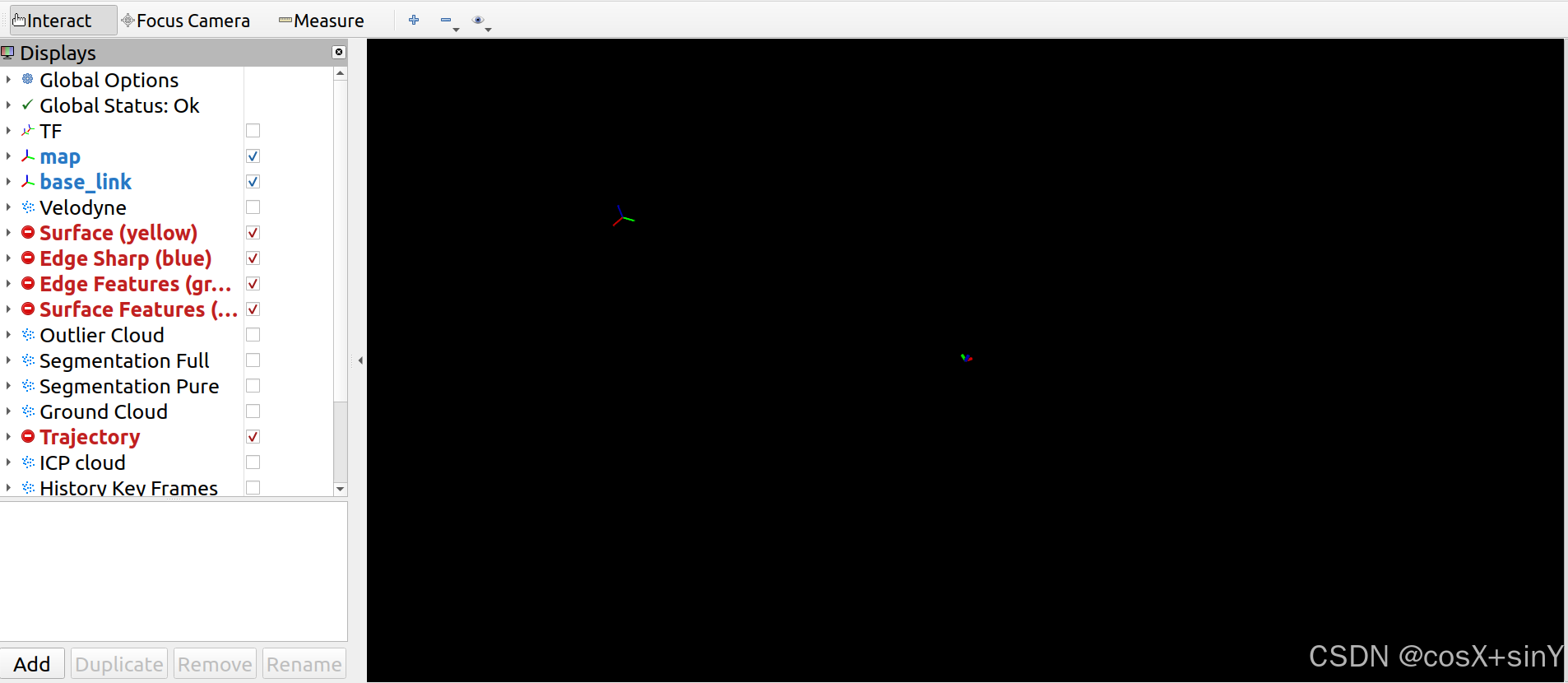
效果图:

5.保存包bag,pcl和查看pcl
在代码建图过程中保存数据
rosbag record -o out /laser_cloud_surround转化为pcd文件
rosrun pcl_ros bag_to_pcd <your bag name>.bag /laser_cloud_surround pcd查看pcd文件
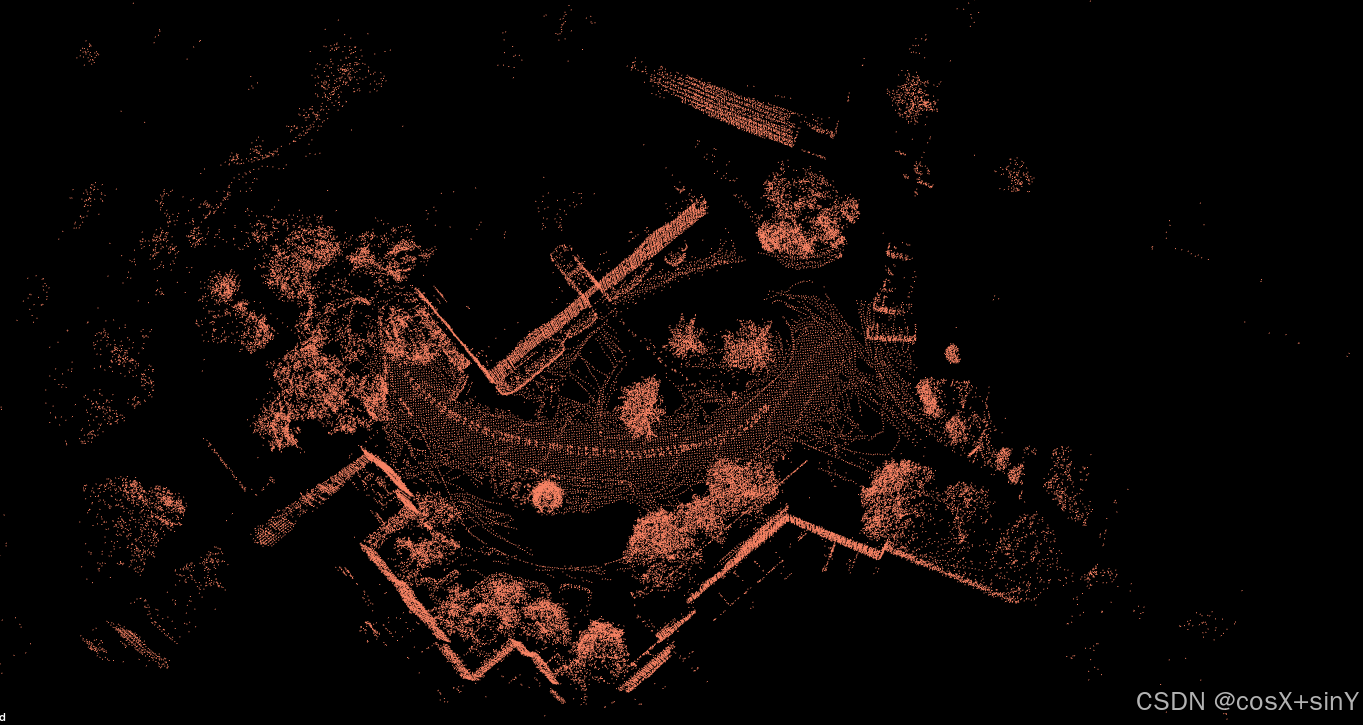
pcl_viewer xxxxxx.pcd
查看的pcd