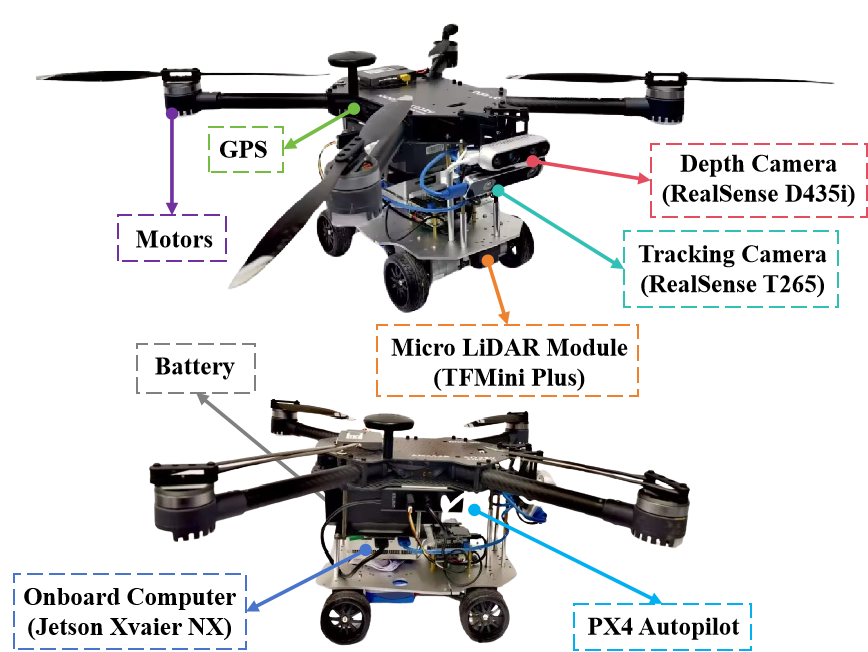
随着空陆两栖机器人(AGR)在应急救援和城市巡检等领域的应用范围不断扩大,其在复杂动态环境中实现自主导航的挑战也日益凸显。对此香港大学王俊铭基于阿木实验室P600无人机平台自主搭建了一整套空地两栖机器人,使用Prometheus开源框架完成算法的仿真验证与实机部署。继AGRNavICRA'24和HE-NavRA-L'24等研究成果后,王俊铭同学近期发表的OMEGA RA-L 2025和OccRWKVICRA 2025论文,为解决复杂动态环境下的自主导航问题提供了创新思路。这些研究不仅拓展了空地两栖机器人的应用场景,也为提升其在不确定环境中的适应能力奠定了理论基础。
空地两栖机器人系列内容
OccRWKV (ICRA'25) 首个RWKV-based 的3D语义占用网络。
OMEGA (RA-L'24) 首个空陆两栖机器人动态导航系统,高效应对动态环境。
HE-Nav (RA-L'24) 首个ESDF-free空陆两栖导航系统,高效应对杂乱环境。
AGRNav (ICRA'24) 首个遮挡感知空陆两栖导航系统,高效应对遮挡丰富环境。
本文主要针对最新的研究成果 OccRWKV (ICRA'25)和 OMEGA (RA-L'24) 进行解读。
OMEGA导航系统
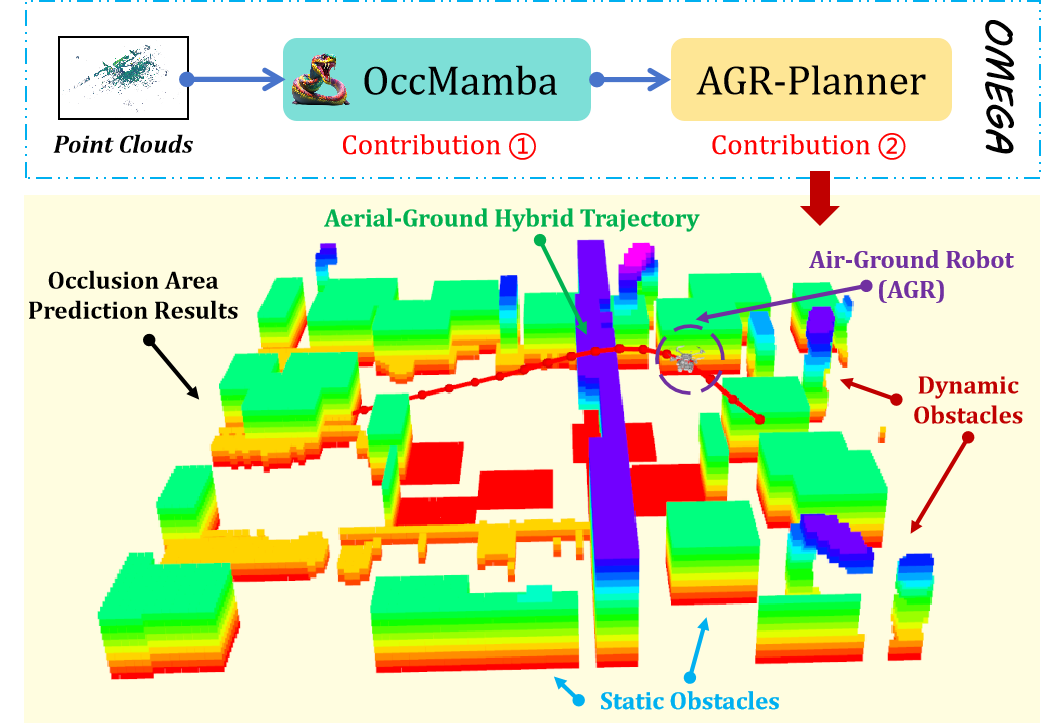
传统空地机器人导航系统依赖3D语义占用网络预测遮挡区域,并通过ESDF(欧几里得符号距离场)进行路径规划。但在动态场景中(如人群密集区),该方案会出现感知延迟且规划低效等问题。而*OMEGA 是首个专为空地两栖机器人设计、确保在高度遮挡和快速变化的环境中高效自主导航。
技术亮点
OMEGA系统通过OccMamba感知网络与AGR-Planner规划器实现端到端优化。
OccMamba网络:
-
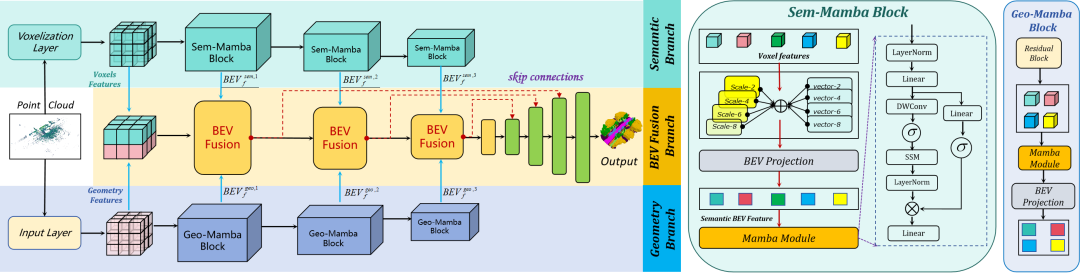
创新性地提出了一种三分支网络结构,将语义和几何预测解耦为不同的部分,通过集成Sem-Mamba与Geo-Mamba模块,高效地进行3D语义占用预测。
-
引入Mamba状态空间模型,利用线性复杂度捕获长距离依赖。
-
特征投影至BEV空间融合,计算负载降低37%(22.1 FPS实时推理)。
AGR-Planner规划器:
-
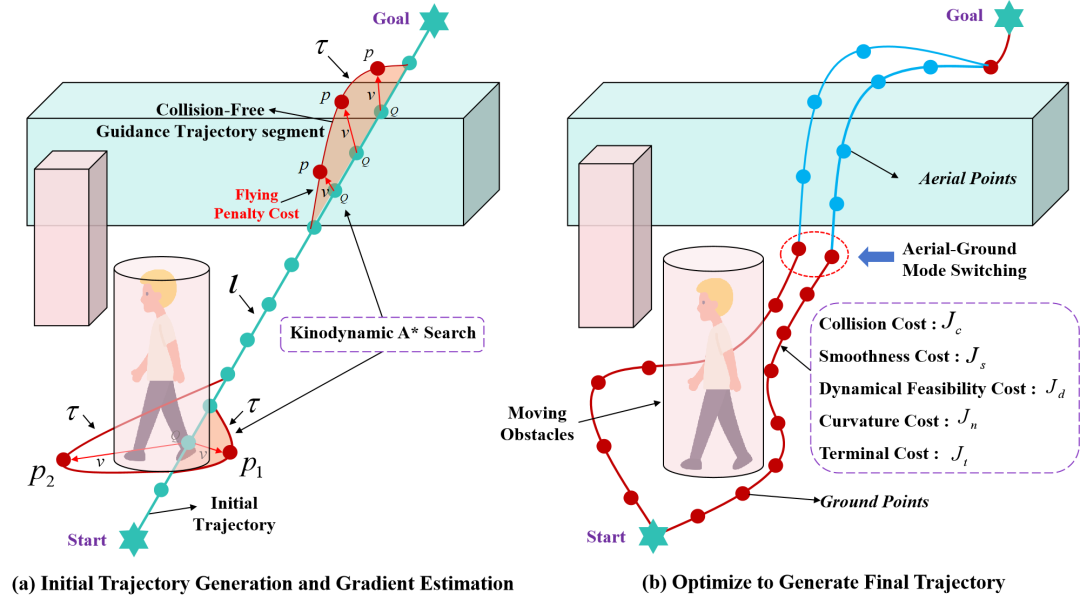
ESDF-Free路径搜索:结合Kinodynamic A*算法与梯度优化,规划时间从6.5s缩短至0.8s。
-
引入能量消耗约束项,让空地模式切换的决策效率提升3倍。
实机验证
-
在SemanticKITTI数据集上,OccMamba的mIoU达25.0(SOTA)
-
实测动态环境规划耗时仅0.8秒,成功率98%
开源链接
https://jmwang0117.github.io/OMEGA/
OccRWKV 3D语义占用网络
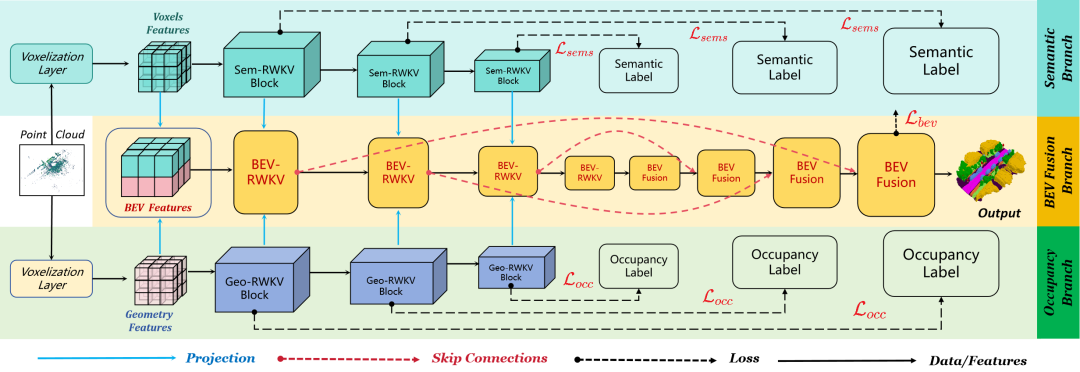
现有3D语义占据网络普遍存在计算冗余,而OccRWKV是首个基于RWKV架构设计的3D语义占用网络,能够实现线性复杂度的全局特征建模。
技术突破
-
**双支路解耦设计:**将语义预测(识别物体类别)与几何预测(判断占据空间)分离为独立分支,避免特征干扰。
-
**RWKV注意力机制:**通过类似人脑记忆的循环网络结构,在包含256×256×32个三维单元的立体地图中,用线性增长的计算量实现跨区域特征关联。
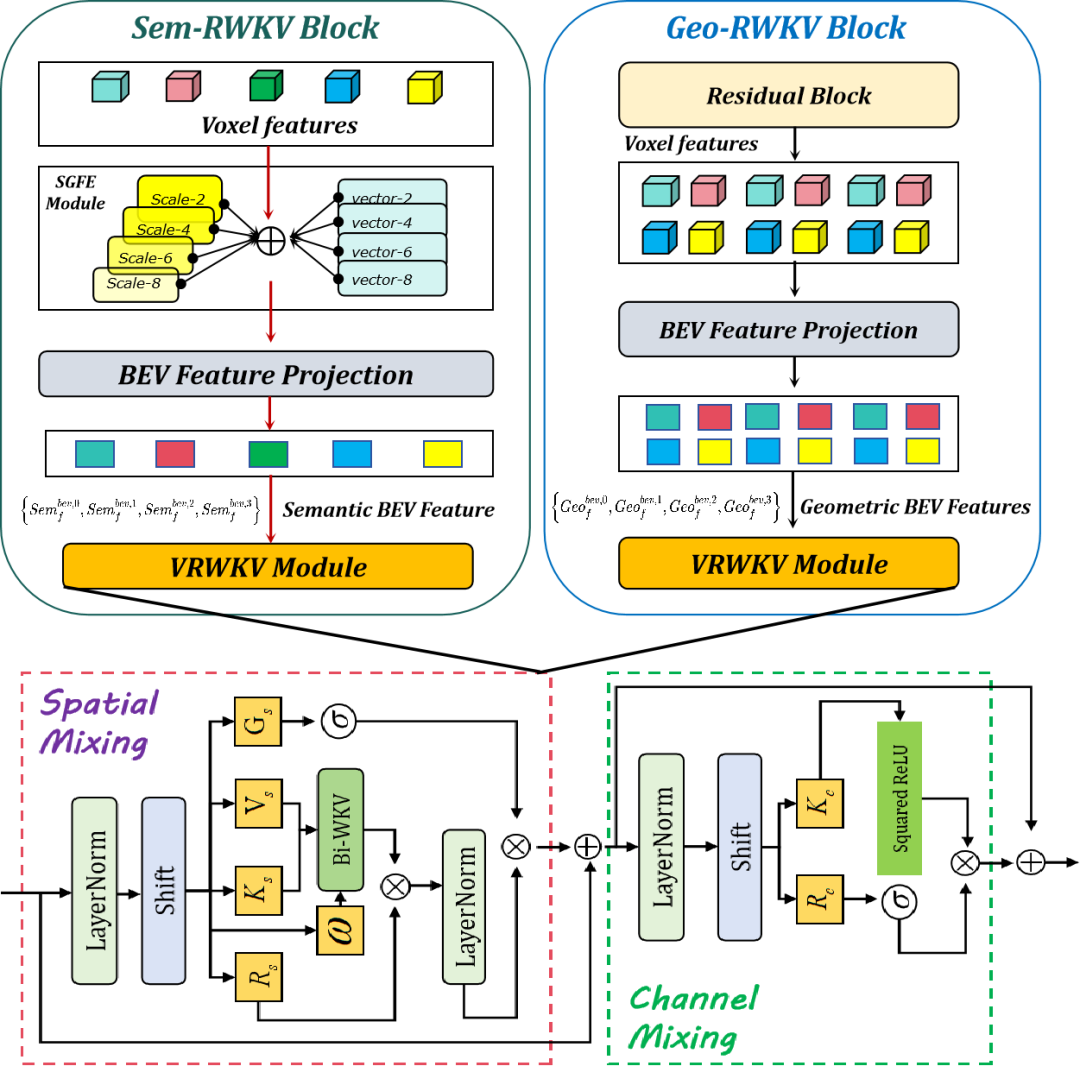
- **BEV空间投影:**将三维特征压缩至鸟瞰图空间融合,计算量降低78.5%。
实验验证
-
部署速度22.2 FPS(Jetson Xavier NX)满足机器人实时需求。
-
零样本迁移实验显示,在未知环境导航任务中移动时间降低16.5%。