对机器人建模(URDF)、创建仿真环境(Gazebo)以及感知环境(Rviz)等系统性实现
0.问题
在vscode中roslaunch,出现下面的错误:
RLException: Invalid roslaunch XML syntax: no element found: line 1, column 0
The traceback for the exception was written to the log file
解决:ctrl+s保存
1.如何打开rviz
2.urdf+xacro
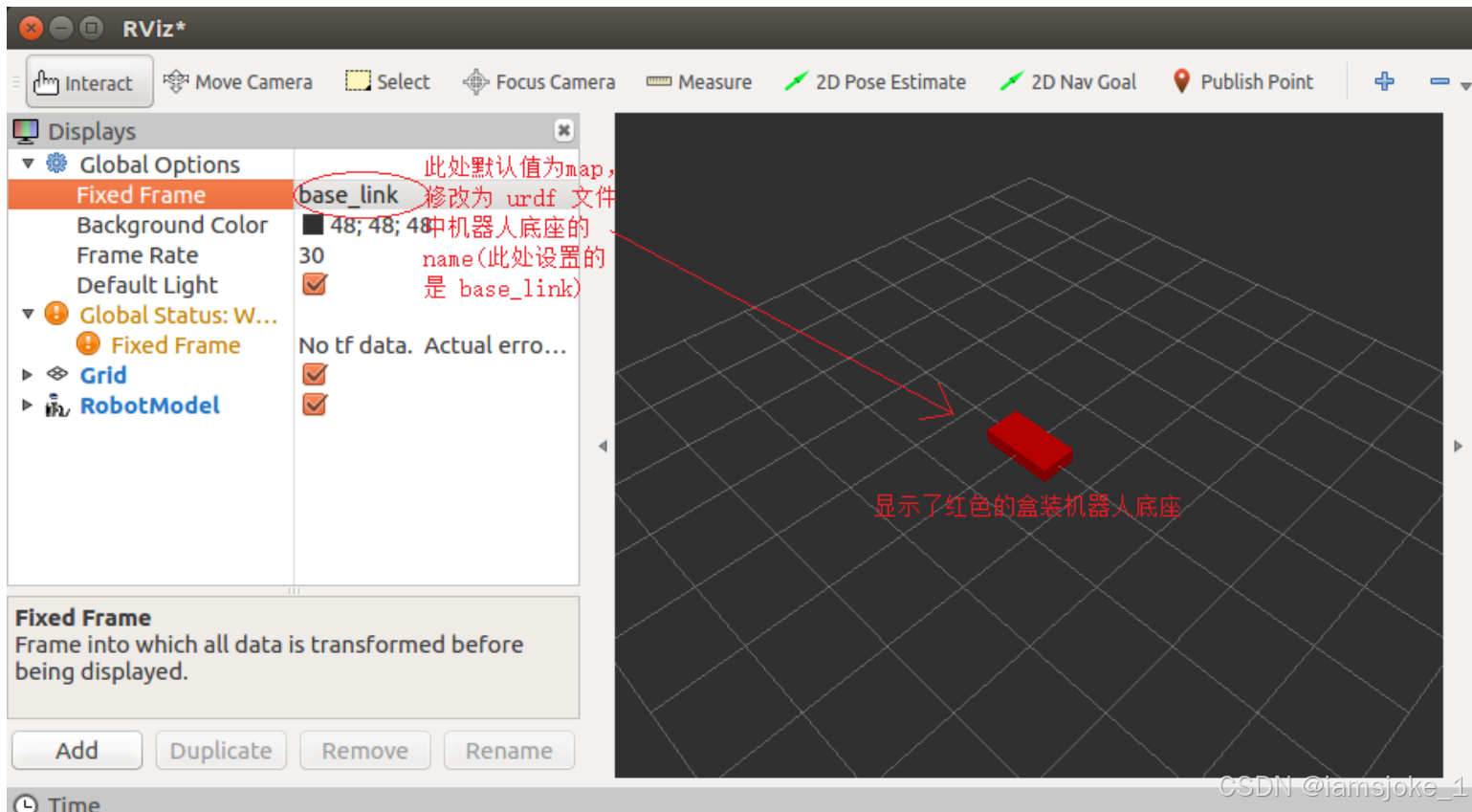
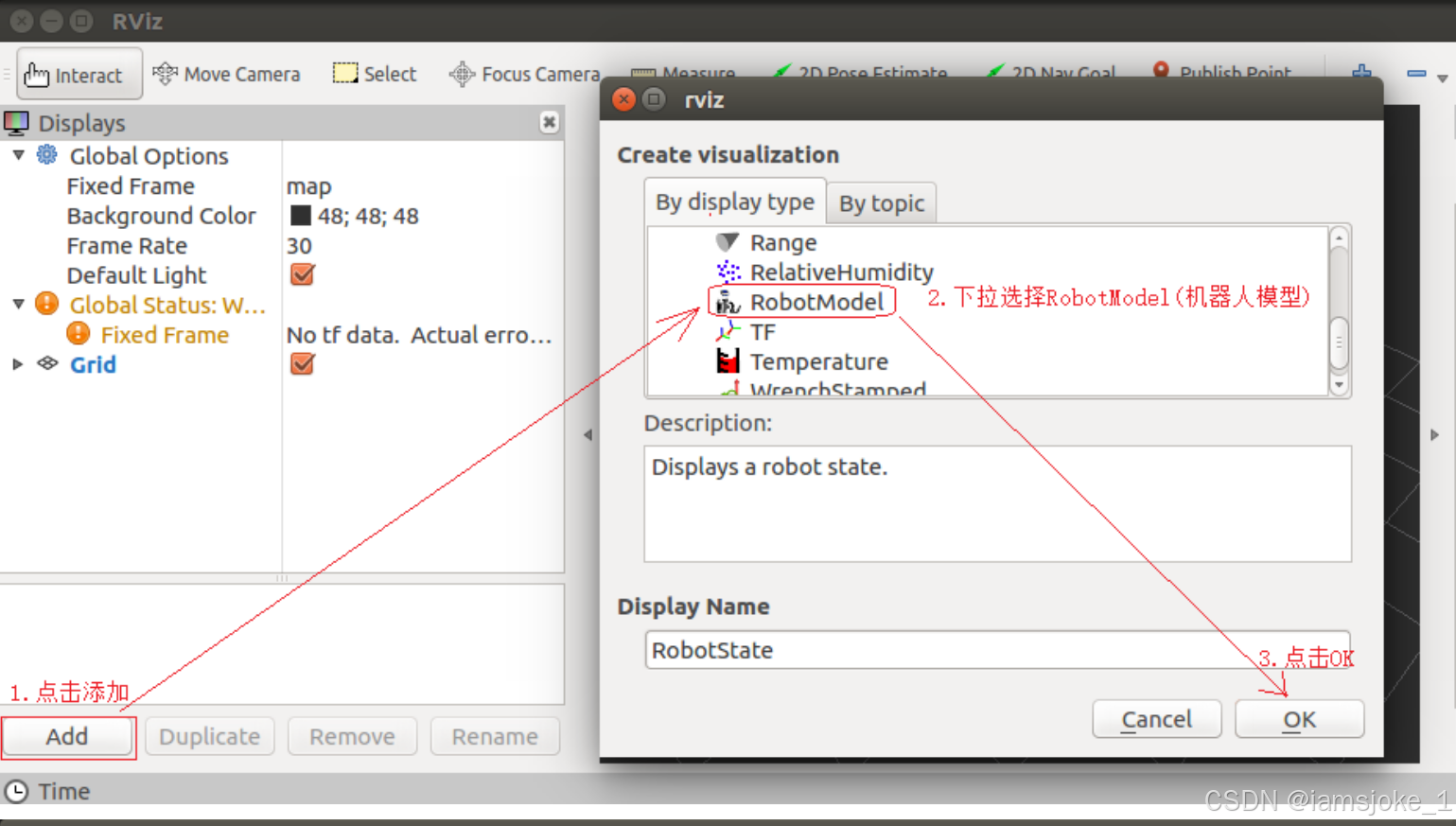
默认使用robotmodel
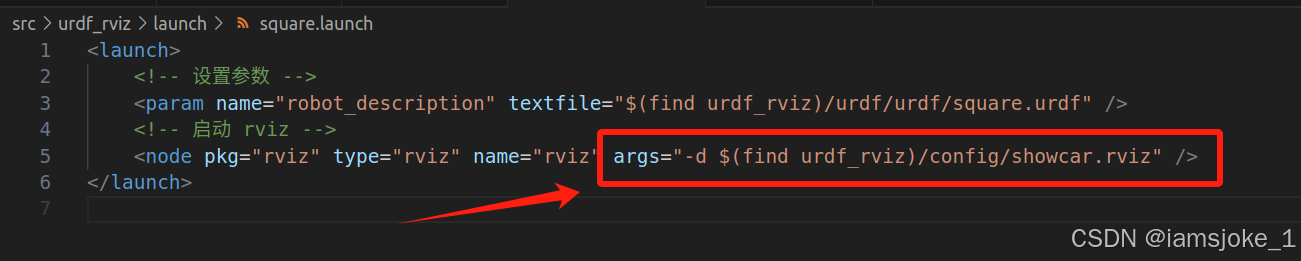
save as config保存
需要加入args,注意路径
再次运行前需要保存launch文件