提示:若没有查找的算子,可以评论区留言,会尽快更新
Halcon应用:相机标定
前言
本篇博文主要用于记录学习Halcon中算子的应用场景,及其使用代码和图像展示。只讲通俗易懂使用方法,不讲原理,不讲原理,不讲原理,重要的事情说三遍。
相机标定 :在图像测量过程以及机器视觉应用中为确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,必须建立相机成像的几何模型,这些几何模型参数就是相机参数。在大多数条件下这些参数必须通过实验与计算才能得到,这个求解参数的过程就称之为相机标定。
大白话就是看到图像中的点位知道真实世界的点位
然而为了准确获得点位,就需要对相机进行标定,不然因为相机存在的误差会导致点位不准确
提示:以下是本篇文章正文内容,下面案例可供参考,注意参数坐标的使用,能帮助你理解算子
一、Halcon应用?
Halcon 是一个强大的图像处理工具,该工具是为了解决机器视觉项目任务而创建的。
二、应用实战
1、图像理解
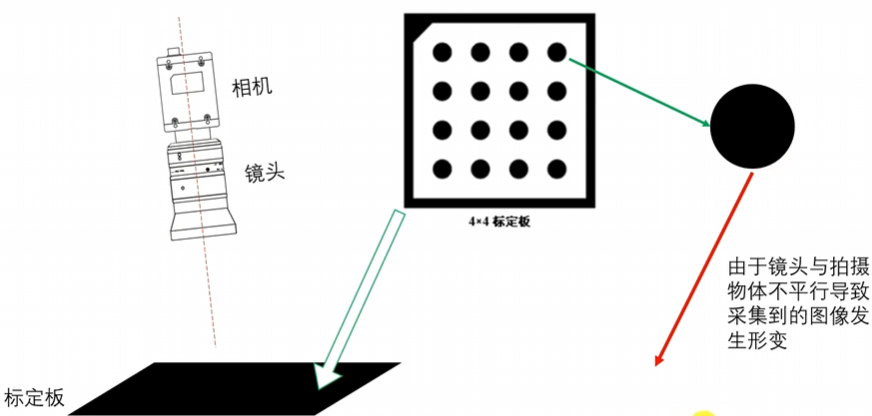
图像发生扭曲,为了准确获得点位就需要无失真的图像,标定相机就是为了让失真图变为无失真

如下安装,安装过程中或多或少都会导致安装不准,以及相机生产中的工艺问题,都会导致问题出现,即使是标定板上的圆,也有可能实际拍摄出来变成椭圆。
我们标定的目的获得相机:
- 内参(焦距,像素大小等)
- 外参(位置,旋转方向等)
- 畸变参数
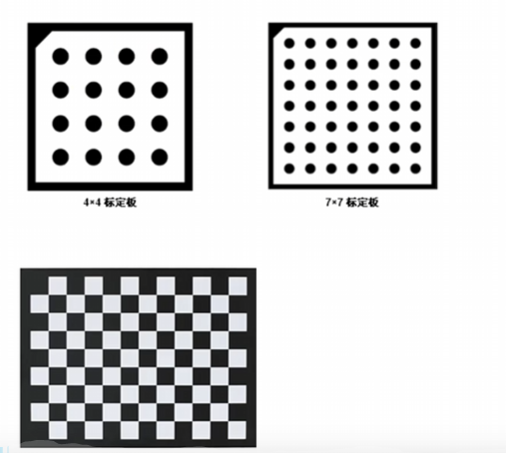
我们可以采用标准标定吧进行标定:圆形标定板和棋盘格标定板
我们使用halcon生成一个标定板,并打印出来:
c
gen_caltab (7, 7, 0.0125, 0.5, 'caltab.descr', 'caltab.ps')
*.ps 文件可以用ps打开
1. 7 7 代表 7*7标定
2. 0.0125,代表两圆心距离,单位m
3. 0.5 代指圆直径与圆心距离的比值,上面参数表示圆直径6.2mm左右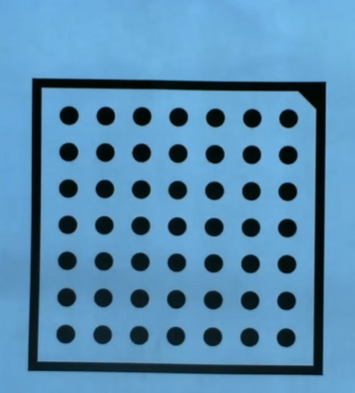
1.1、开始标定
下面我们用标定助手来进行标定
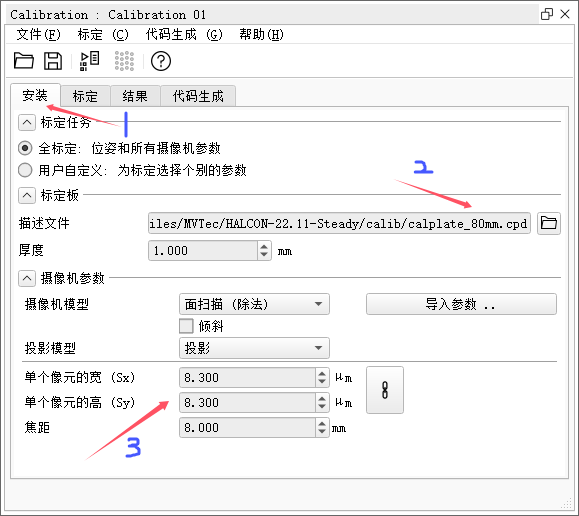
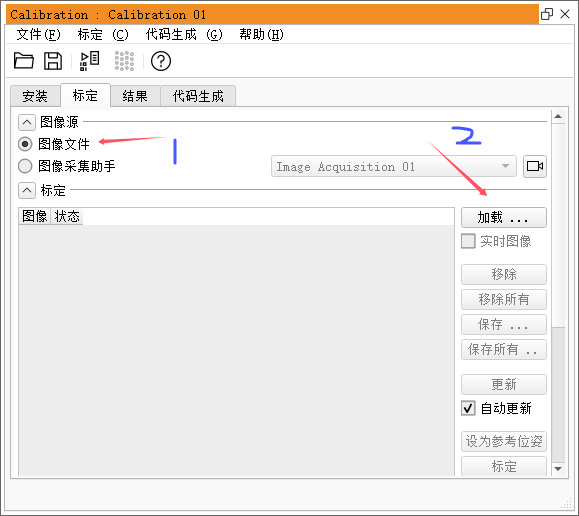
步骤1 、打开标定助手的calibration
2处填入上文算子生成的描述文件
3处填入官方给出的相机参数
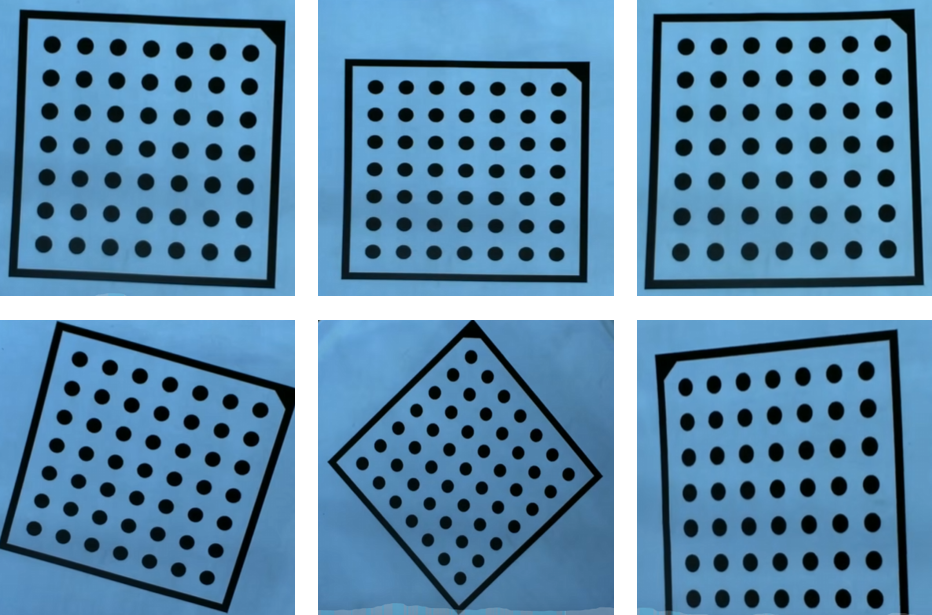
步骤2、 拍摄标定图像
可以提前拍好也可以使用采集助手拍摄
图片数量约15-20张
标定板位置占据图像视野约0.3-0.5
从各个角度开始拍摄
移动位置相机视野要能够看到标定板
相机视野的各个位置并有一定的倾斜
拍摄例图:
选择一张平面不倾斜的图作为参考位姿即可,进行下一步的计算
如果标定助手说图有问题,按照要求更改即可
检查没有问题,直接标定即可
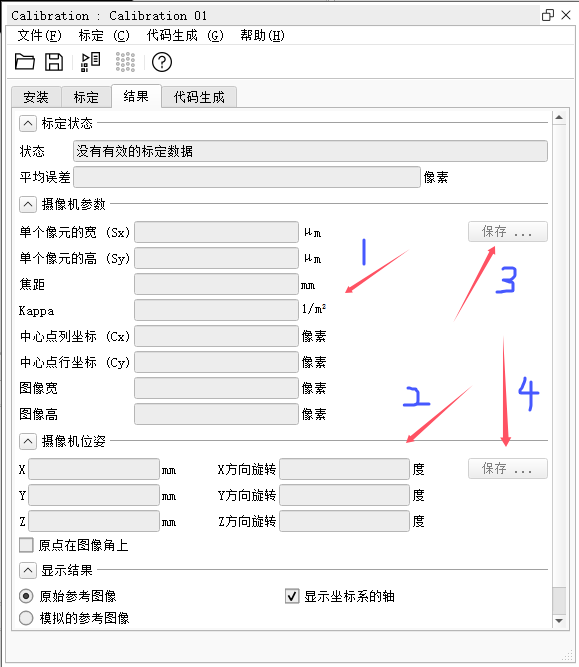
在结果里就可以得到
内参1
外参2
并可以将参数保存,供后面使用
大家可以点击代码生成自己看下代码的结果是啥,并和此图做对比
参数标定至此结束!
如有问题,欢迎大家指出,谢谢!!!