故障现象
一辆2016款奔驰C200L车,搭载274 920发动机,累计行驶里程约为13万km。该车组合仪表上的防侧滑故障灯、转向助力故障灯、安全气囊故障灯等偶尔异常点亮,且此时将挡位置于R挡,中控显示屏提示"后视摄像头不可用",无法显示倒车影像。
故障诊断
用故障检测仪检测,发现多个控制单元中均存储有通信类故障代码(图1),其中故障代码"U015587 与仪表盘的通信存在故障。信息缺失"出现的频次较高。
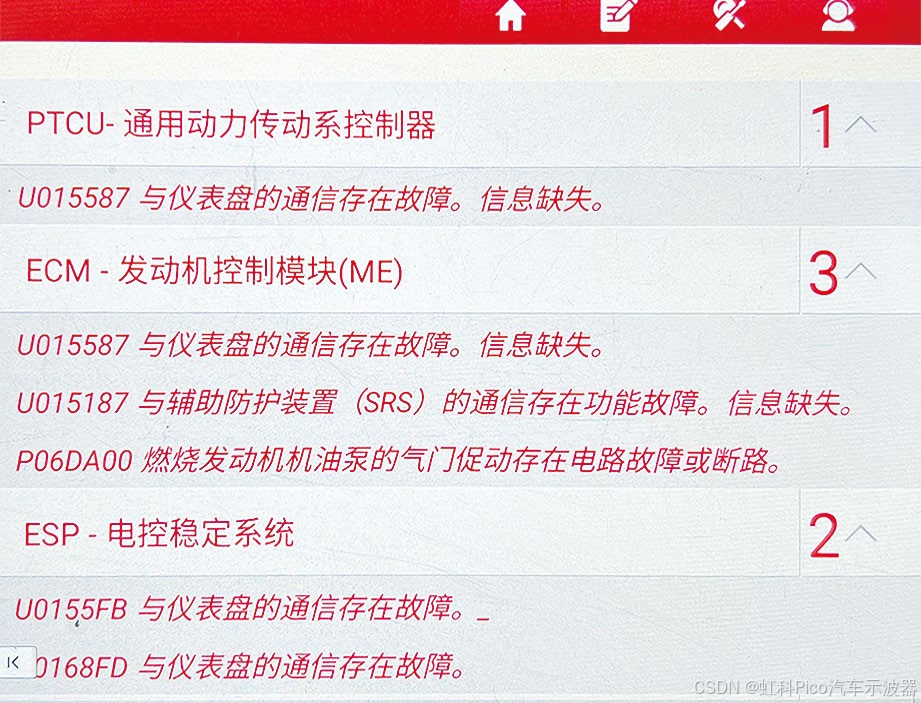
图1 存储的故障代码1
而组合仪表中存储有故障代码"U006488 与用户界面控制器区域网络(CAN)总线的通信存在功能故障。总线关闭"(图2)。
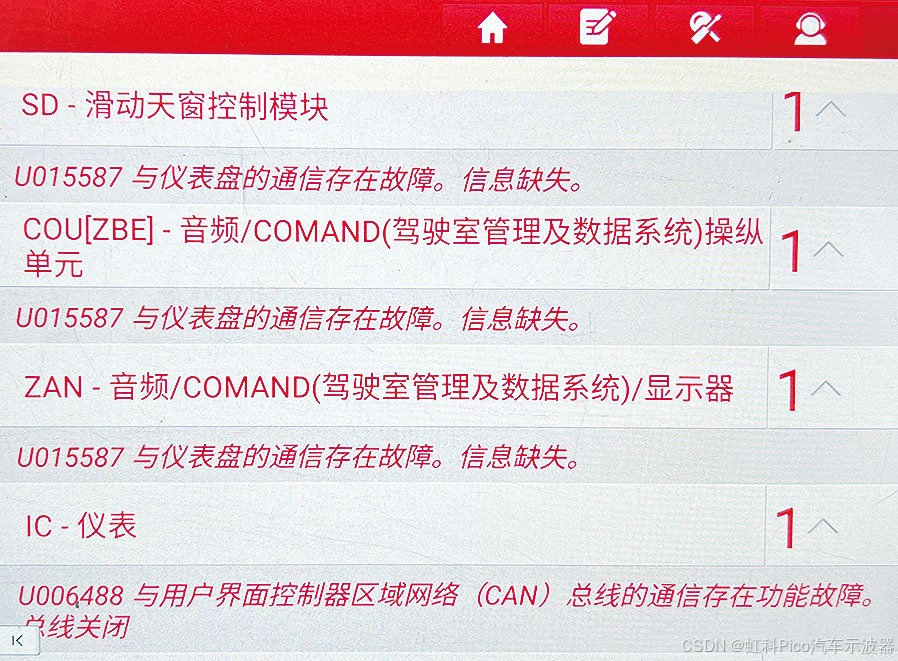
图2 存储的故障代码2
由图3可知,组合仪表和后视摄像头控制单元均在用户界面控制器区域网络(CAN HMI)总线上。结合故障现象及故障代码分析,怀疑CAN HMI偶尔发生通信故障。

图3 CAN HMI总线拓扑
用虹科Pico汽车示波器从后视摄像头控制单元中间导线连接器处测量CAN HMI总线波形,未出现故障时的波形如图4所示,总线空闲时,CAN L线和CAN H线的电压均约为2.3 V(正常应约为2.5 V),偏低;CAN L线和CAN H线上的电压之和有一点波动,在总线空闲时约为4.6 V,传输数据时约为5 V;CAN L线和CAN H 线上的电压差正常,在总线空闲时约为0 V,传输数据时约为2 V。
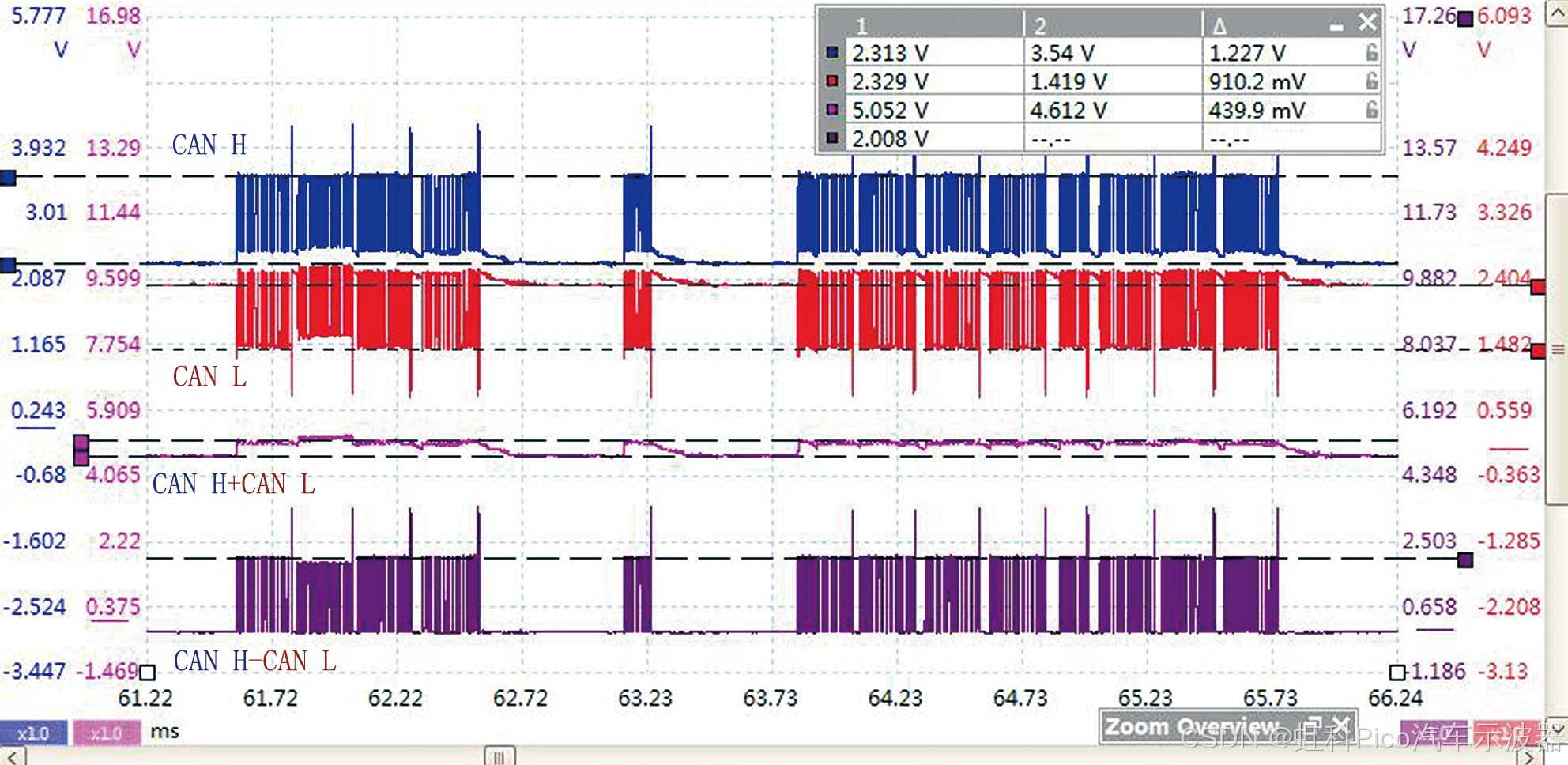
图4 未出现故障时的CAN HMI总线波形
出现故障时的波形如图5所示,CAN H线上的电压信号偶尔下翻,与CAN L线上的电压信号重合,此时CAN L线和CAN H线上的电压差约为0 V,无法传输数据,这是CAN H线发生断路时的典型故障波形。
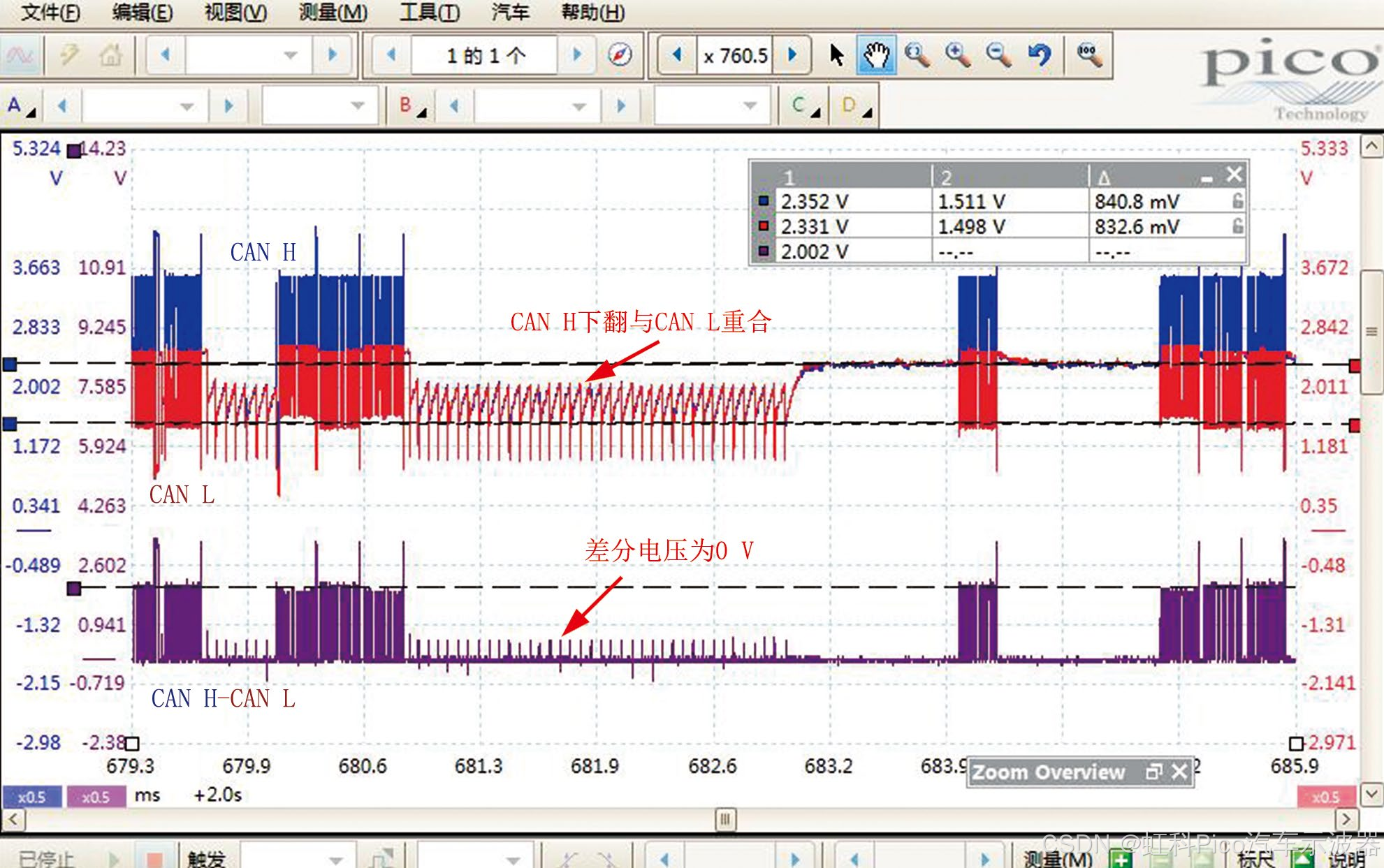
图5 故障时的CAN HMI总线波形
由于后视摄像头控制单元中存储的故障代码最多(有8个与其他控制单元失去通信的故障代码),且故障出现时倒车影像不可用,决定先检查后视摄像头控制单元的CAN HMI总线。进一步检查发现,该车后视摄像头控制单元配置了电动折叠盖,上面的CAN L线和CAN H线的绝缘层均断裂,露出了铜丝,其中CAN L线的铜丝未折断,而CAN H线的铜丝已折断(图6)。
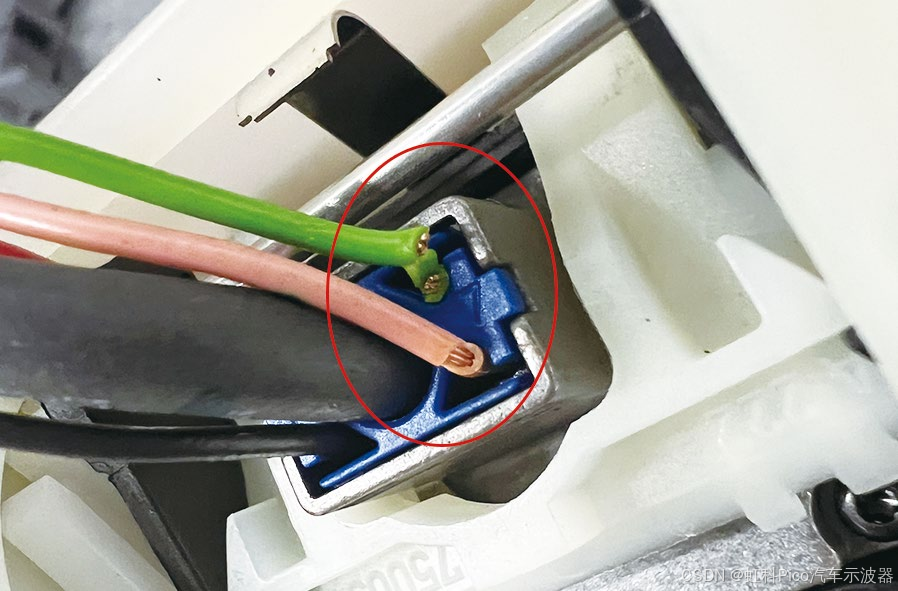
图6 CAN H线的铜丝已折断
故障排除
修复后视摄像头控制单元的CAN HMI 总线后反复试车,故障未再出现,故障排除。
故障总结
如图7所示,组合仪表(IC)在车身系统(Body)总线上,后视摄像头控制单元(RFK)在智能驾驶辅助系统(Adas)总线上,这说明通用型故障检测仪上的通信网络拓扑结构往往不准确,容易误导维修人员,因此在诊断通信网络故障时,应以维修手册上的通信网络拓扑结构为准。
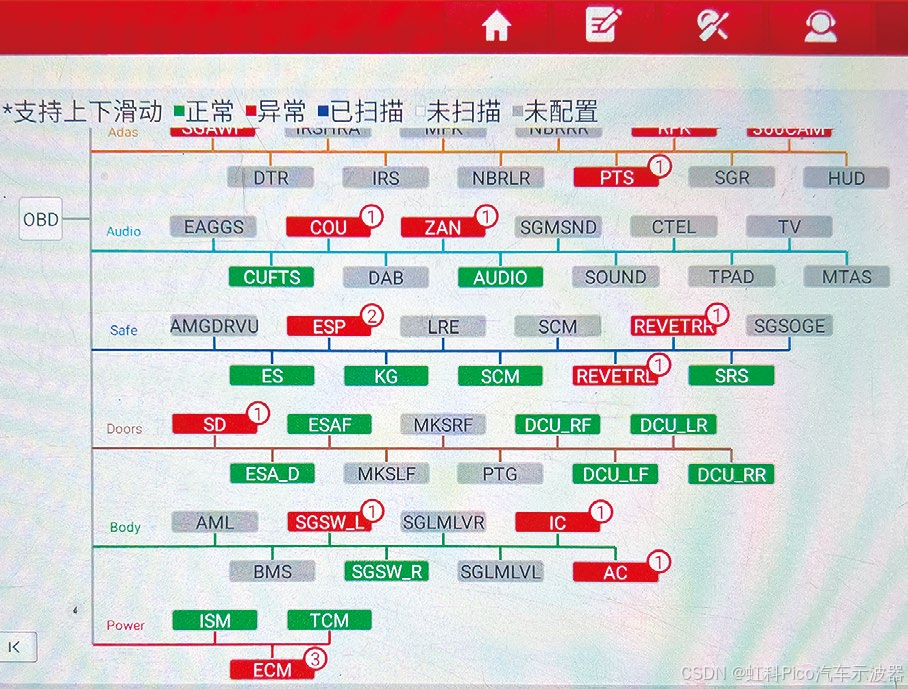
图7 通用型故障检测仪上的通信网络拓扑结构
案例作者:乐翔,Tech Gear汽车诊断学院优秀学员,现任杭州捷盛行汽车服务有限公司技术经理、开思杭州地区技术顾问;2015年获保时捷全球认证技师资质;2016年取得汽车维修高级技师资格证书。