目录
1、遥控器校准
在校准无线电系统之前,必须连接/绑定接收器和发射器。绑定发射器和接收器对的过程是特定于硬件的(有关说明,请参阅 RC 手册)。
参考:Radio Control (RC) Setup | PX4 Guide (v1.15)
1.1、校准步骤
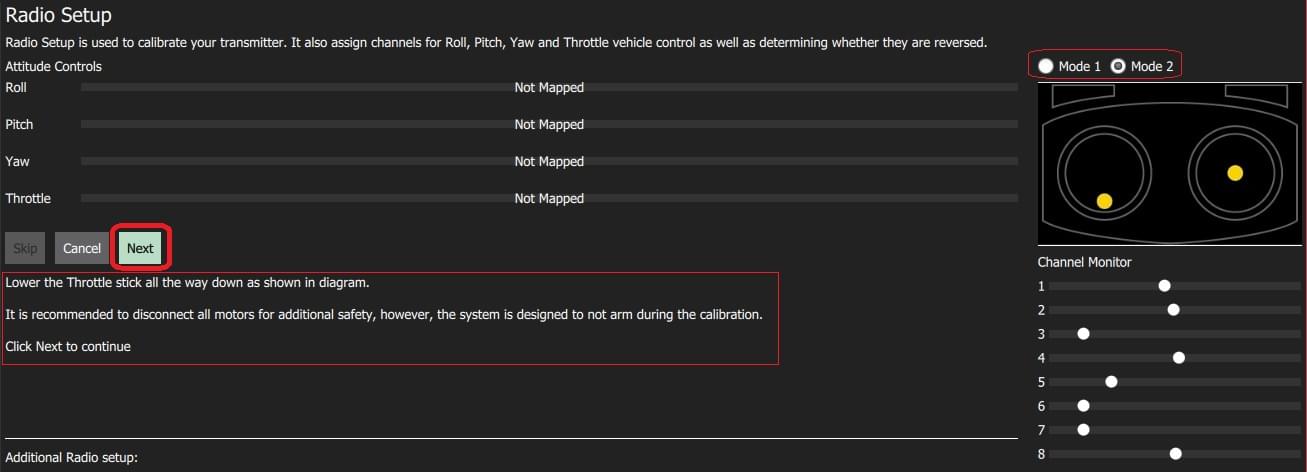
校准过程很简单 - 系统会要求您以屏幕右上角的发射器图上显示的特定模式移动摇杆。
要校准无线电:
-
打开您的 RC 发射器。
-
启动 QGroundControl 并连接无人机。
-
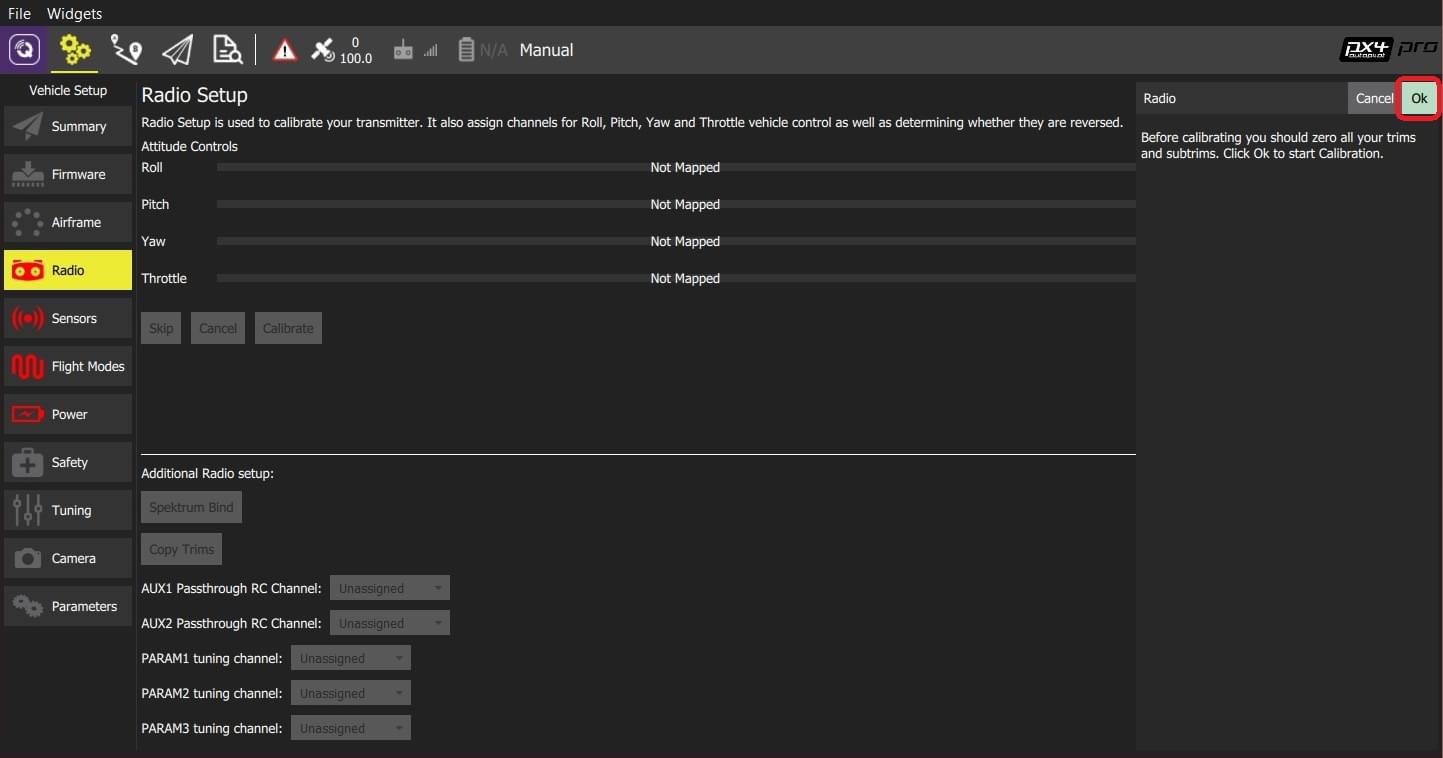
选择顶部工具栏中的 Gear 图标(Vehicle Setup),然后选择侧边栏中的 Radio。
-
按 OK 开始校准。
-
设置与您的发射机匹配的发射机模式单选按钮(这可确保 QGroundControl 显示正确的摇杆位置,供您在校准期间遵循)。
-
将摇杆移动到文本中指示的位置(以及发射机图像上)。当摇杆就位时,按 Next。对所有位置重复上述步骤。
-
出现提示时,将所有其他开关和拨盘移动到其整个范围内(您将能够在 Channel Monitor 上观察到它们的移动)。
-
按 Next 保存设置。
无线电校准在 Autopilot 自动舵设置视频中进行了演示 此处 (youtube)。
2、飞行模式选择,遥控器通道映射
PX4 允许您指定一个 "模式" 通道,并选择最多 6 种飞行模式,这些模式将根据通道的 PWM 值激活。您还可以单独指定用于映射 Kill Switch、Return to launch mode 和 offboard 模式的通道。
参考:Flight Mode Configuration | PX4 Guide (v1.15)
2.1、配置步骤
要配置单通道飞行模式选择:
-
启动 QGroundControl 并连接无人机。
-
打开您的 RC 发射器。
-
选择**"Q"图标>"飞行器设置">"飞行模式** "(侧边栏)以打开飞行模式设置。

-
指定飞行模式设置:
- 选择 Mode 频道 (在此上方显示为 Channel 5,但这取决于您的发射机配置)。
- 将您为模式选择设置的发射机开关(或开关)移动到可用位置。与您当前开关位置匹配的模式插槽将被突出显示(上方是飞行模式 1 )。
信息
虽然您可以在 6 个插槽中的任何一个中设置飞行模式,但只会突出显示(黄色高亮部分)/使用映射到 switch 位置的通道。
- 选择要为每个开关位置触发的飞行模式。
-
指定 Switch Settings:
- 选择要映射到特定作的通道 - 例如:返回 模式、Kill 开关 、offboard 模式等(如果您的发射机上有备用开关和通道)。
-
测试模式是否映射到正确的发射机开关:
- 检查 Channel Monitor 以确认每个开关都更改了预期的通道。
- 依次选择发射器上的每个模式开关,并检查所需的飞行模式是否已激活(活动模式的 QGroundControl 上的文本变为黄色)。
所有值在更改时都会自动保存。