一、背景
无论是机器人领域、SLAM还是自动驾驶领域,都会涉及相机标定,但是看了很多博客,都是各种坐标系的变换,没有从上层说明进行坐标变换的目的是什么,以及相机标定完成后,是已知像素坐标求世界坐标,还是已知世界坐标求像素坐标。
二、相机标定的目的
给定物体的参考点坐标(x,y,z)和它的像素坐标(u,V)
确定相机内部的几何和光学特性(内部参数) fx、fy、u0、v0等
摄像机在三维世界坐标关系(外部参数) 矩阵R和平移向量P
标定完成后,既可以从像素坐标推导世界坐标,也可以从世界坐标计算像素坐标,具体取决于任务需求。例如:
机械臂抓取:从像素坐标推世界坐标。
渲染或AR:从世界坐标求像素坐标。
三、坐标系间的关系

世界坐标系到相机坐标系是为了外参标定

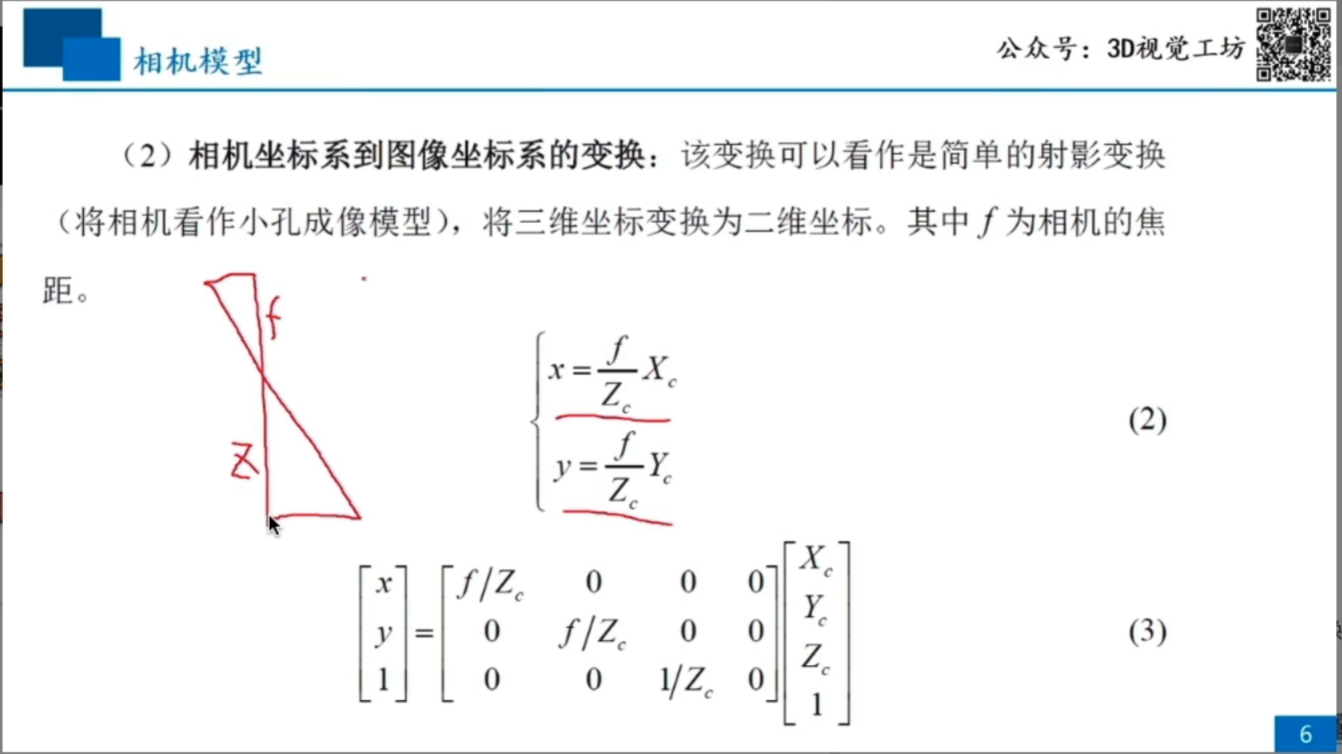
相机坐标系到图像坐标系是将三维坐标转为二维坐标,用到了相似三角形
图像坐标系到像素坐标系是为了内参标定
