Bayer Pattern与Demosaic算法详解:从传感器原始数据到彩色图像
一、引言
在现代数码相机和手机摄像头中,我们能够拍摄到丰富多彩的彩色图像。然而,你可能不知道的是,图像传感器本身并不能直接感知颜色------它们只能感知光的强度。那么,我们是如何从这些单色传感器获取彩色图像的呢?这就要归功于Bayer Pattern(拜耳阵列)和Demosaic(去马赛克)算法的巧妙配合。本文将深入探讨这一关键技术。
文章目录
- [Bayer Pattern与Demosaic算法详解:从传感器原始数据到彩色图像](#Bayer Pattern与Demosaic算法详解:从传感器原始数据到彩色图像)
-
- 一、引言
- [二、Bayer Pattern(拜耳阵列)](#二、Bayer Pattern(拜耳阵列))
-
- [2.1 什么是Bayer Pattern](#2.1 什么是Bayer Pattern)
- [2.2 Bayer Pattern的排列方式](#2.2 Bayer Pattern的排列方式)
- [2.3 Bayer Pattern的优势与局限](#2.3 Bayer Pattern的优势与局限)
- 三、Demosaic(去马赛克)算法
-
- [3.1 基本Demosaic方法](#3.1 基本Demosaic方法)
-
- [3.1.1 最近邻插值](#3.1.1 最近邻插值)
- [3.1.2 双线性插值](#3.1.2 双线性插值)
- [3.2 高级Demosaic算法](#3.2 高级Demosaic算法)
-
- [3.2.1 基于边缘导向的插值](#3.2.1 基于边缘导向的插值)
- [3.2.2 自适应同色插值](#3.2.2 自适应同色插值)
- [3.2.3 基于频率域的算法](#3.2.3 基于频率域的算法)
- [3.2.4 基于深度学习的算法](#3.2.4 基于深度学习的算法)
- [3.3 Demosaic中的挑战](#3.3 Demosaic中的挑战)
- 四、实际应用与优化
-
- [4.1 相机中的实现](#4.1 相机中的实现)
- [4.2 计算摄影中的改进](#4.2 计算摄影中的改进)
- 五、代码示例
- 六、总结
- 参考文献
二、Bayer Pattern(拜耳阵列)
2.1 什么是Bayer Pattern
我们知道,一张数字图像中的每个像素可以用RGB三原色表示。在相机内,最初是在每个像素点内加一个三棱镜分光,但是这样设计会导致相机过于庞大。
Bayer Pattern 是由柯达公司的科学家Bryce Bayer在1976年发明的一种彩色滤光片阵列(CFA, Color Filter Array)。它的核心思想是在每个像素上覆盖一个特定颜色的滤光片,使得单个单色传感器能够捕获彩色信息。
2.2 Bayer Pattern的排列方式
最常见的Bayer排列是RGGB排列,其模式如下:
R G R G R G
G B G B G B
R G R G R G
G B G B G B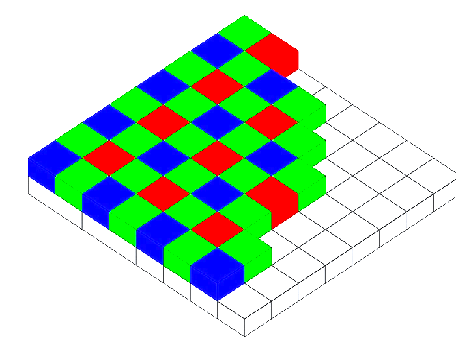
在这种排列中:
- 红色®和蓝色(B)滤光片各占25%
- 绿色(G)滤光片占50%(因为人眼对绿色更敏感)
这种2×2的重复模式覆盖整个传感器表面。当然,其他变种排列也存在,如:
- BGGR
- GRBG
- GBRG
- 等等
2.3 Bayer Pattern的优势与局限
优势:
- 只需要一个传感器即可捕获彩色信息
- 保持较高的空间分辨率(尤其是绿色通道)
- 实现简单,成本低
局限:
- 每个像素只能捕获一个颜色通道的信息
- 需要复杂的插值算法来重建完整彩色图像
- 可能导致颜色伪影(如摩尔纹、伪彩色等)
三、Demosaic(去马赛克)算法
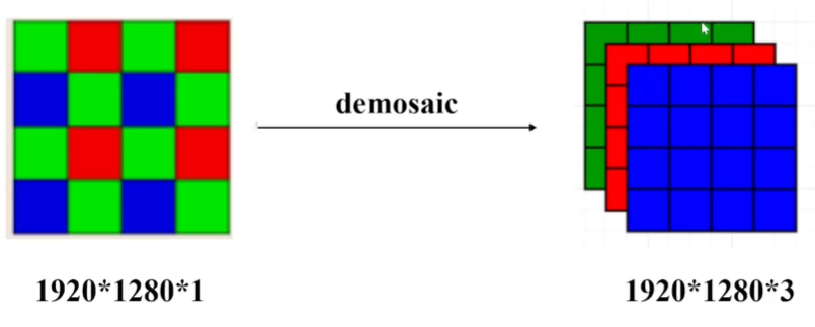
Demosaic算法是++将Bayer Pattern原始数据(Raw图像 )转换为完整RGB图像++的过程。由于每个像素只包含一个颜色通道的信息,其他两个通道的值需要通过周围像素来估计。
3.1 基本Demosaic方法
3.1.1 最近邻插值
最简单的插值方法,直接复制相邻的同色像素值。
python
# 伪代码示例
for each pixel:
if it's R pixel:
G = average(adjacent G pixels)
B = average(adjacent B pixels)
elif it's G pixel:
R = average(adjacent R pixels)
B = average(adjacent B pixels)
else: # B pixel
R = average(adjacent R pixels)
G = average(adjacent G pixels)3.1.2 双线性插值
更复杂的插值方法,考虑更多相邻像素,进行加权平均。
3.2 高级Demosaic算法
3.2.1 基于边缘导向的插值
考虑图像边缘信息,避免跨越边缘进行插值,减少伪影。
python
# 伪代码示例
for each pixel:
calculate edge direction (horizontal/vertical)
if strong edge detected:
interpolate along the edge direction only
else:
use bilinear interpolation3.2.2 自适应同色插值
利用颜色通道之间的相关性进行更准确的插值。
3.2.3 基于频率域的算法
在频率域中处理,可以更好地处理高频信息。
3.2.4 基于深度学习的算法
可以取得更好的效果,今年的相关论文读者可以很容易地查找到。
3.3 Demosaic中的挑战
- 伪彩色:在边缘区域出现的错误颜色
- 锯齿效应:斜边出现锯齿状伪影
- 细节损失:高频细节可能被平滑
- 噪声放大:插值过程可能放大噪声
四、实际应用与优化
4.1 相机中的实现
Demosaic是现代数码相机进行摄像的Pipeline(关于Pipeline这个词的意思,可以参考:Pipeline模式详解:提升程序处理效率的设计模式)中的关键一环操作,因此现代数码相机通常采用专有的Demosaic算法,结合以下优化:
- 白平衡校正
- 噪声抑制
- 锐化处理
- 色彩校正矩阵
4.2 计算摄影中的改进
- 四色滤光片:如RGBW、RYYB等变种
- 非Bayer排列:如富士的X-Trans传感器
- 多帧合成:通过多帧信息提高色彩精度
五、代码示例
以下是一个简单的Python实现示例(使用OpenCV):
python
import cv2
import numpy as np
def simple_demosaic(bayer, pattern='RGGB'):
"""简单的双线性去马赛克算法"""
# 创建空的RGB图像
rgb = np.zeros((bayer.shape[0], bayer.shape[1], 3), dtype=bayer.dtype)
if pattern == 'RGGB':
# 红色像素位置(0,0)
rgb[::2, ::2, 0] = bayer[::2, ::2] # R
# 绿色像素位置(0,1)和(1,0)
rgb[::2, 1::2, 1] = bayer[::2, 1::2] # G
rgb[1::2, ::2, 1] = bayer[1::2, ::2] # G
# 蓝色像素位置(1,1)
rgb[1::2, 1::2, 2] = bayer[1::2, 1::2] # B
# 插值绿色通道在R和B位置
# R位置的G
kernel = np.array([[0, 1, 0],
[1, 0, 1],
[0, 1, 0]]) / 4.0
rgb[::2, ::2, 1] = cv2.filter2D(bayer, -1, kernel)[::2, ::2]
# B位置的G
rgb[1::2, 1::2, 1] = cv2.filter2D(bayer, -1, kernel)[1::2, 1::2]
# 插值R通道在G和B位置
# G位置的R (在B行)
rgb[1::2, ::2, 0] = (rgb[0::2, ::2, 0] + rgb[2::2, ::2, 0]) / 2
# B位置的R
rgb[1::2, 1::2, 0] = (rgb[0::2, 0::2, 0] + rgb[0::2, 2::2, 0] +
rgb[2::2, 0::2, 0] + rgb[2::2, 2::2, 0]) / 4
# 插值B通道在G和R位置
# G位置的B (在R行)
rgb[::2, 1::2, 2] = (rgb[::2, 0::2, 2] + rgb[::2, 2::2, 2]) / 2
# R位置的B
rgb[::2, ::2, 2] = (rgb[0::2, 1::2, 2] + rgb[2::2, 1::2, 2] +
rgb[1::2, 0::2, 2] + rgb[1::2, 2::2, 2]) / 4
return rgb
# 示例使用
# 假设我们有一个Bayer格式的原始图像
# bayer_image = ... (从相机或文件加载)
# rgb_image = simple_demosaic(bayer_image, 'RGGB')
# cv2.imwrite('demosaiced.jpg', rgb_image)六、总结
Bayer Pattern和Demosaic算法是现代数字成像的基础技术之一,它使得我们能够使用单一传感器捕获彩色图像。虽然基本概念相对简单,但高质量的Demosaic算法需要考虑图像内容、边缘信息、噪声特性等多种因素,是计算机视觉和图像处理中的一个重要研究领域。
随着计算摄影的发展,出现了许多改进技术,如多帧合成、深度学习去马赛克等,这些新技术正在不断提高图像质量,推动摄影技术的发展。
参考文献
- Bayer, B. E. (1976). "Color imaging array". US Patent 3,971,065.
- Malvar, H. S., He, L. W., & Cutler, R. (2004). "High-quality linear interpolation for demosaicing of Bayer-patterned color images". IEEE International Conference on Acoustics, Speech, and Signal Processing.
- Zhang, L., & Wu, X. (2005). "Color demosaicking via directional linear minimum mean square-error estimation". IEEE Transactions on Image Processing.
希望这篇文章能帮助你理解Bayer Pattern和Demosaic的基本原理和实现方法。在实际应用中,可以根据具体需求选择或开发更高级的算法来获得更好的图像质量。