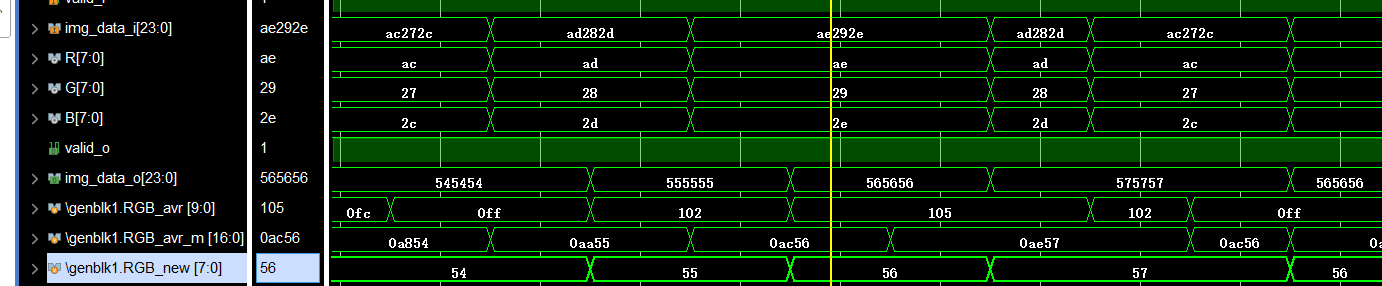
由于fpga实现除法相对复杂,故将除法变为乘法再移位。因此每种方法对图像输入数据均分3步进行,极其有效信号打三拍处理。
cpp
`timescale 1ns / 1ps
//
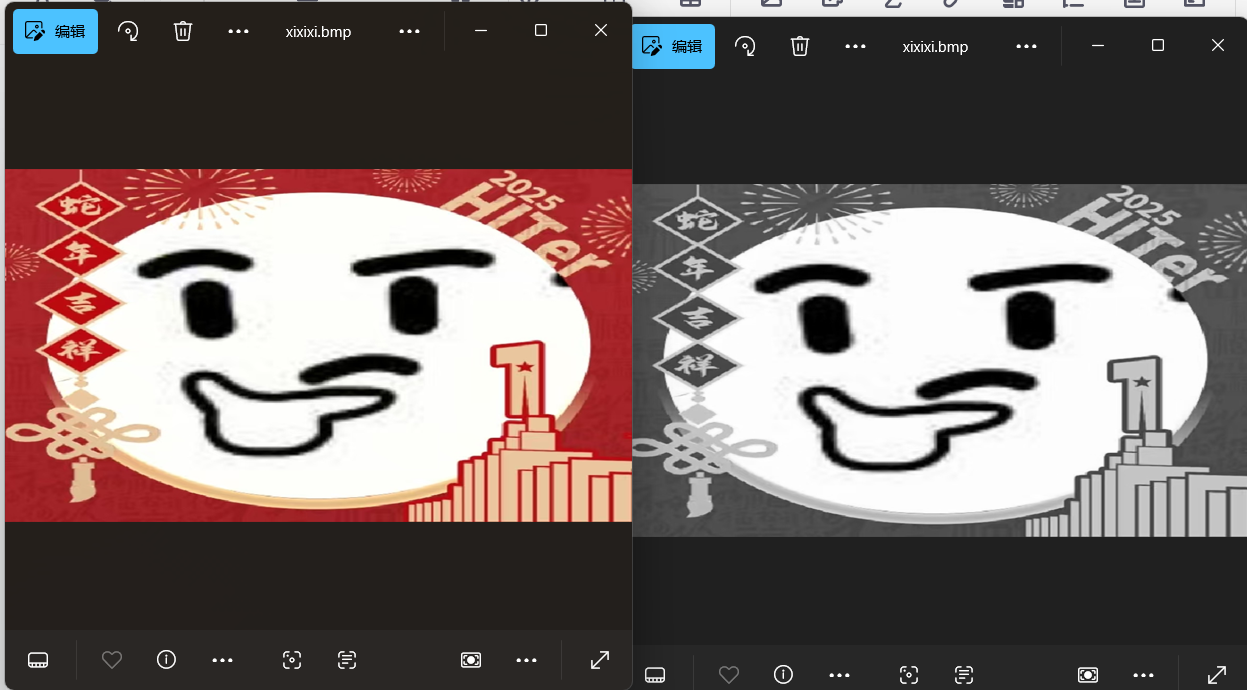
// Description: 彩色图像灰度化
//
module image_rgb2gray(
input wire clk ,
input wire reset ,
input wire valid_i ,
input wire [23:0] img_data_i,
output wire valid_o ,
output wire [23:0] img_data_o
);
//常量
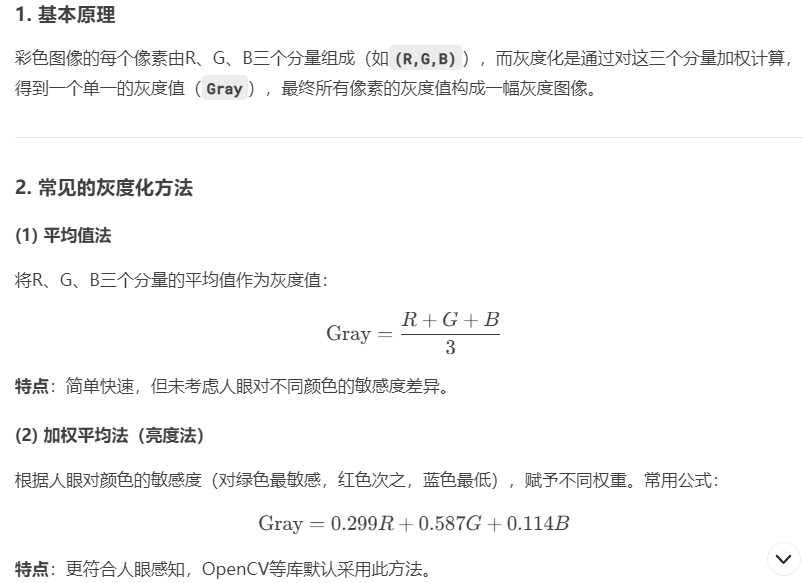
parameter MODE = 1; //0表示加权平均法,1表示平均法
//Y=0.299*R十0.587*G+0.114*B
parameter C0 = 9'd306; //0.299*1024;
parameter C1 = 10'd601;//0.587*1024;
parameter C2 = 7'd117; //0.114*1024;
//参数声明
wire [7:0] R, G, B;
assign {R, G, B} = img_data_i;
generate
if (MODE) begin
//1-平均法 1/3 * 512 = 171
reg valid_d1;
reg [9:0] RGB_avr;
reg valid_d2;
reg [16:0] RGB_avr_m;
reg valid_d3;
reg [7:0] RGB_new;
always@(posedge clk or posedge reset) begin
if(reset) begin
valid_d1 <= 'b0;
RGB_avr <= 'b0;
end else begin
valid_d1 <= valid_i;
RGB_avr <= R + G + B;
end
end
//最大值不可能超过255*3*171 = 17'd130815
always@(posedge clk) begin
RGB_avr_m <= RGB_avr * 8'd171;
end
always@(posedge clk or posedge reset) begin
if(reset) begin
valid_d2 <= 'b0;
end else begin
valid_d2 <= valid_d1;
end
end
//最大值不可能超过255
always@(posedge clk or posedge reset) begin
if(reset) begin
valid_d3 <= 'b0;
RGB_new <= 'b0;
end else begin
valid_d3 <= valid_d2;
RGB_new <= RGB_avr_m[16:9];
end
end
assign valid_o = valid_d3;
assign img_data_o = {3{RGB_new}};
end else begin
//0-加权平均法
reg valid_d1;
reg [16:0] Y_R_m;
reg [17:0] Y_G_m;
reg [14:0] Y_B_m;
reg valid_d2;
reg [17:0] Y_s;//最大值,当RGB都等于255时,(C0 + C1 + C2)*255 = 1024*255;不会出现负数
reg valid_d3;
reg [7:0] Y;
always@(posedge clk ) begin
Y_R_m <= R*C0;
Y_G_m <= G*C1;
Y_B_m <= B*C2;
end
always@(posedge clk or posedge reset) begin
if(reset) begin
valid_d1 <= 0;
end else begin
valid_d1 <= valid_i;
end
end
always@(posedge clk or posedge reset) begin
if(reset) begin
Y_s <= 0;
valid_d2 <= 0;
end else begin
if(valid_d1) begin
Y_s <= Y_R_m + Y_G_m + Y_B_m;
end
valid_d2 <= valid_d1;
end
end
always@(posedge clk or posedge reset) begin
if(reset) begin
Y <= 0;
valid_d3 <= 0;
end else begin
if(valid_d2) begin
Y <= Y_s[17:10];
end
valid_d3 <= valid_d2;
end
end
assign valid_o = valid_d3;
assign img_data_o = {3{Y}};
end
endgenerate
endmodule