二维情况下,四个小车各自有绝对定位(GNSS),相互之间部分有相对定位(UWB)时,一个滤波器搞定四个小车的状态滤波。使用EKF作为滤波方法
文章目录
建模
四辆小车组成编队,每辆车有 x x x、 y y y两个轴,所以状态量有4*2=8维,观测量为各自的 G N S S GNSS GNSS绝对定位+相对定位(1对2+2对1+2对3+3对3+4对3),所以观测量Z的维度为(4+5)*2=18维。
定义系统误差矩阵Q和观测误差协方差矩阵R为:
matlab
Q = 0.1*diag(ones(8,1)) %过程噪声协方差
R = 0.1*diag([ones(18,1)]) %观测噪声协方差定义四个小车的初值为:(1,0)、(2,0)、(3,0)、(4,0),各自的状态方程设置简单一点,统一为:
X ˙ k + 1 = f ( X k ) + u ( k ) = X k + ( cos ( 0.1 k ) cos ( 0.1 k ) + 1 ) ) \dot{X}{k+1}=f(X{k})+u(k)=X_{k}+\left.\left(\begin{matrix}\cos(0.1k)\\\cos(0.1k)+1)\end{matrix}\right.\right) X˙k+1=f(Xk)+u(k)=Xk+(cos(0.1k)cos(0.1k)+1))
因此四个小车混在一起,可以得到状态量:
x k = ( x k 1 ) T , ( x k 2 ) T , ... , ( x k 4 ) T T \mathbf{x}_{k}=\left\\left(\\mathbf{x}_{k}\^{1}\\right)\^{\\mathrm{T}},\\left(\\mathbf{x}_{k}\^{2}\\right)\^{\\mathrm{T}},\\ldots,\\left(\\mathbf{x}_{k}\^{4}\\right)\^{\\mathrm{T}}\\right^{\mathrm{T}} xk=(xk1)T,(xk2)T,...,(xk4)TT
X对应的状态变换矩阵为8维的主对角矩阵:
matlab
F = eye(8);观测数据生成:
matlab
Q_abs = 0.2*diag([1,1]);w_abs=sqrt(Q_abs)*randn(size(Q_abs,1),length(t));Zflight.a = flight.a+w_abs; %生成飞机a的绝对观测量
Q_abs = 0.2*diag([1,1]);w_abs=sqrt(Q_abs)*randn(size(Q_abs,1),length(t));Zflight.b = flight.b+w_abs;
Q_abs = 0.2*diag([1,1]);w_abs=sqrt(Q_abs)*randn(size(Q_abs,1),length(t));Zflight.c = flight.c+w_abs;
Q_abs = 0.2*diag([1,1]);w_abs=sqrt(Q_abs)*randn(size(Q_abs,1),length(t));Zflight.d = flight.d+w_abs;
Q_coo = 0.1*diag([1,1]);w_coo=sqrt(Q_coo)*randn(size(Q_coo,1),length(t));Zflight.ab = flight.a-flight.b+w_coo; %生成a-b的相对观测量
Q_coo = 0.1*diag([1,1]);w_coo=sqrt(Q_coo)*randn(size(Q_coo,1),length(t));Zflight.ac = flight.a-flight.c+w_coo;
Q_coo = 0.1*diag([1,1]);w_coo=sqrt(Q_coo)*randn(size(Q_coo,1),length(t));Zflight.ad = flight.a-flight.d+w_coo;
Q_coo = 0.1*diag([1,1]);w_coo=sqrt(Q_coo)*randn(size(Q_coo,1),length(t));Zflight.ba = flight.b-flight.a+w_coo;
Q_coo = 0.1*diag([1,1]);w_coo=sqrt(Q_coo)*randn(size(Q_coo,1),length(t));Zflight.bc = flight.b-flight.c+w_coo;
Q_coo = 0.1*diag([1,1]);w_coo=sqrt(Q_coo)*randn(size(Q_coo,1),length(t));Zflight.bd = flight.b-flight.d+w_coo;
Q_coo = 0.1*diag([1,1]);w_coo=sqrt(Q_coo)*randn(size(Q_coo,1),length(t));Zflight.ca = flight.c-flight.a+w_coo;
Q_coo = 0.1*diag([1,1]);w_coo=sqrt(Q_coo)*randn(size(Q_coo,1),length(t));Zflight.cb = flight.c-flight.b+w_coo;
Q_coo = 0.1*diag([1,1]);w_coo=sqrt(Q_coo)*randn(size(Q_coo,1),length(t));Zflight.cd = flight.c-flight.d+w_coo;
Q_coo = 0.1*diag([1,1]);w_coo=sqrt(Q_coo)*randn(size(Q_coo,1),length(t));Zflight.da = flight.d-flight.a+w_coo;
Q_coo = 0.1*diag([1,1]);w_coo=sqrt(Q_coo)*randn(size(Q_coo,1),length(t));Zflight.db = flight.d-flight.b+w_coo;
Q_coo = 0.1*diag([1,1]);w_coo=sqrt(Q_coo)*randn(size(Q_coo,1),length(t));Zflight.dc = flight.d-flight.c+w_coo;再定义观测方程:
matlab
Z_hat =[Xpre(1);Xpre(2);Xpre(3);Xpre(4);Xpre(5);Xpre(6);Xpre(7);Xpre(8);
Xpre(1*2-1)-Xpre(2*2-1);Xpre(1*2)-Xpre(2*2); %Zab
Xpre(2*2-1)-Xpre(1*2-1);Xpre(2*2)-Xpre(1*2); %Zba
Xpre(2*2-1)-Xpre(2*3-1);Xpre(2*2)-Xpre(2*3); %Zbc
Xpre(2*3-1)-Xpre(2*2-1);Xpre(2*3)-Xpre(2*2);%Zcb
Xpre(2*4-1)-Xpre(2*3-1);Xpre(2*4)-Xpre(2*3)%Zdc
];上述代码第一行代表四个小车的绝对观测量(每个小车2个维度,所以共8维)。
第二行表示第一个的坐标减去第二个的坐标(2→1的观测量),第三行至第六行以此类推。
由Z可以得到观测矩阵:
matlab
H = [1,0,0,0,0,0,0,0;
0,1,0,0,0,0,0,0;
0,0,1,0,0,0,0,0;
0,0,0,1,0,0,0,0;
0,0,0,0,1,0,0,0;
0,0,0,0,0,1,0,0;
0,0,0,0,0,0,1,0;
0,0,0,0,0,0,0,1;
1,0,-1,0,0,0,0,0;
0,1,0,-1,0,0,0,0;
-1,0,1,0,0,0,0,0;
0,-1,0,1,0,0,0,0;
0,0,1,0,-1,0,0,0;
0,0,0,1,0,-1,0,0;
0,0,-1,0,1,0,0,0;
0,0,0,-1,0,1,0,0;
0,0,0,0,-1,0,1,0;
0,0,0,0,0,-1,0,1];滤波
matlab
PP=F*P*F'+Q;
Kk=PP*H'/(H*PP*H'+R);
flight_ekf.fully(:,k)=Xpre+Kk*(flightZ.fully(:,k)-Z_hat);
P=PP-Kk*H*PP;
flightP_num.fully(k,:,:) = P;运行结果------演示
CNconcentrate_Ver1竖屏视频
运行结果------绘图
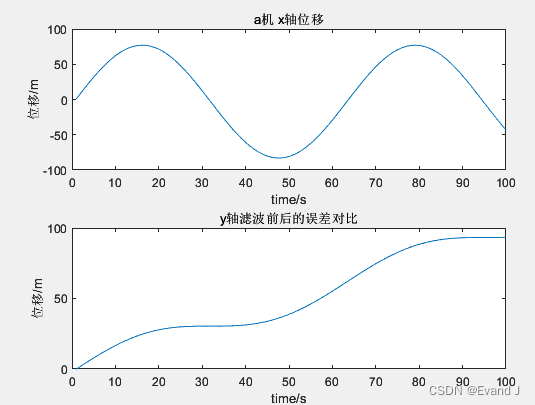
a机的x轴与y轴位移:
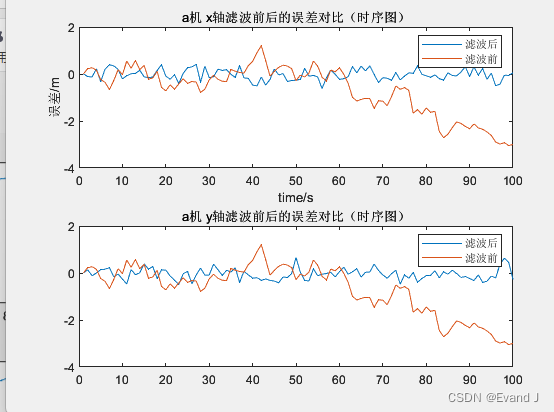
a机的x轴与y轴误差曲线图:
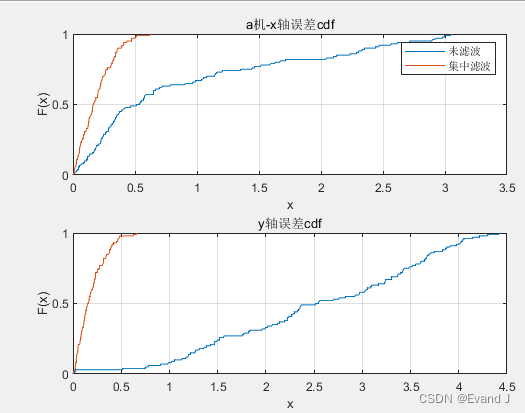
a机x轴和y轴的累积误差概率曲线图:
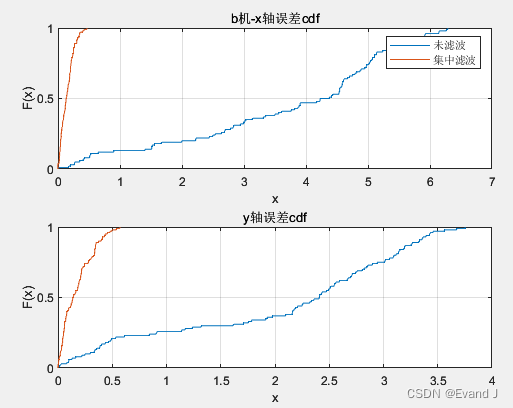
b机x轴和y轴的累积误差概率曲线图:
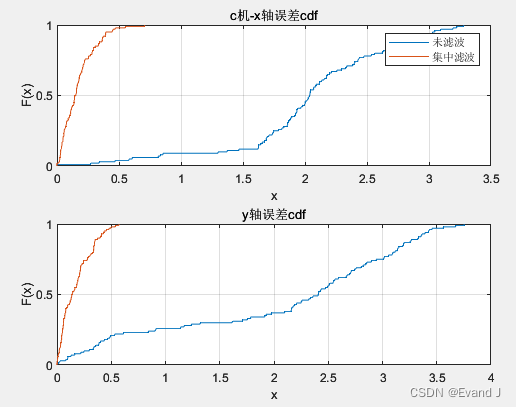
c机x轴和y轴的累积误差概率曲线图:
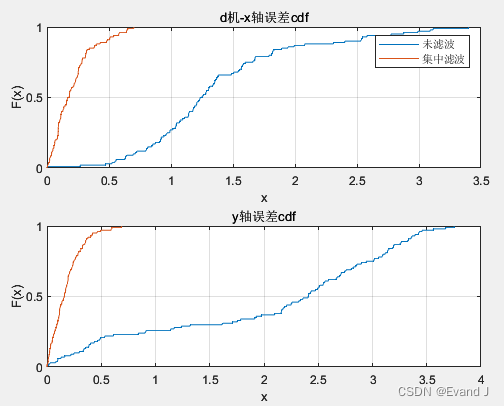
d机x轴和y轴的累积误差概率曲线图:
程序个性化较强,尚未整理成完善的、通用化的例程,如有需要定制或咨询,可通过下方卡片联系作者交流