参考视频
【保姆级教程】大疆无人机rtmp推流直播教程_哔哩哔哩_bilibili
VLC使用教程:
目录
实现效果:
(实验机型:大疆mini4k+RC-N2遥控器、大疆Matrice 3TD+RC Pro遥控器)


注意!!!电脑和遥控器需处于同一网络下!!!
电脑端
下载下面的文件并解压。注意文件存放位置不能有中文路径!
(若分享码失效了可以私信或评论区问我要)
解压后打开最下面的新建 txt 文件,全选并复制 txt文件中的内容
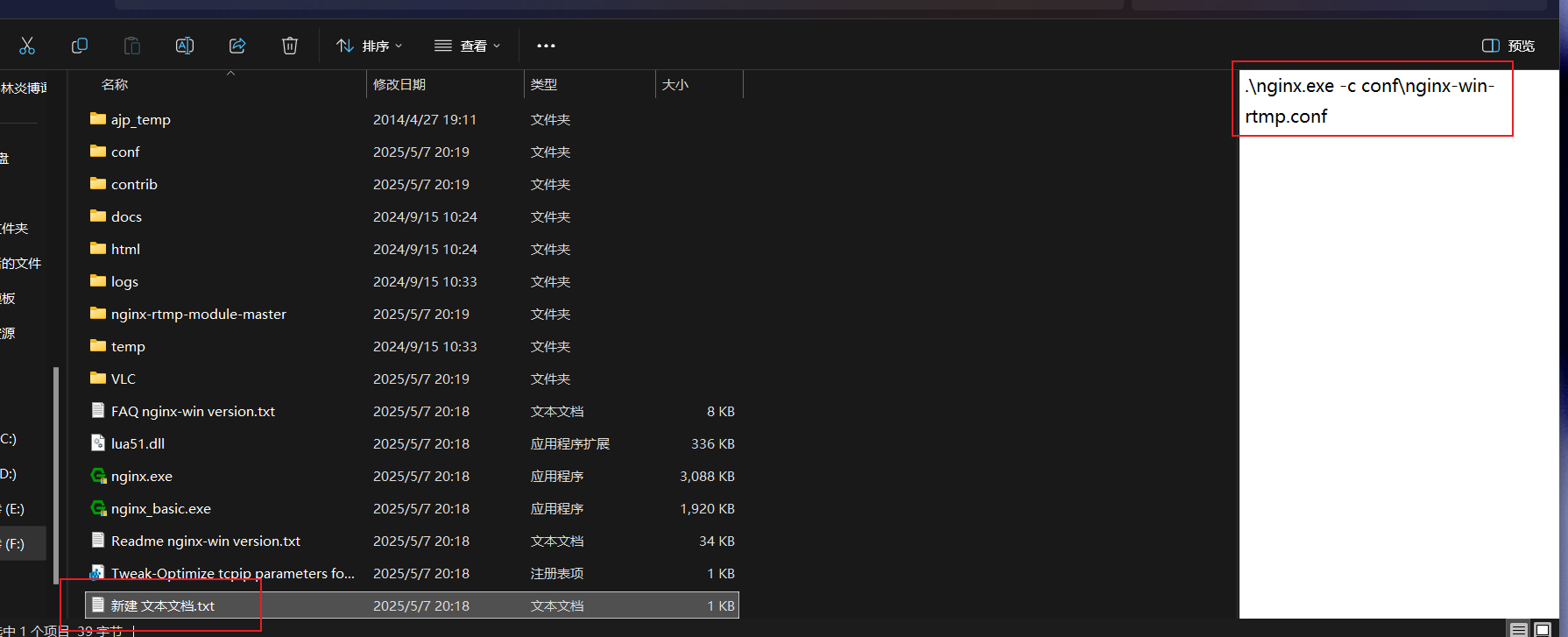
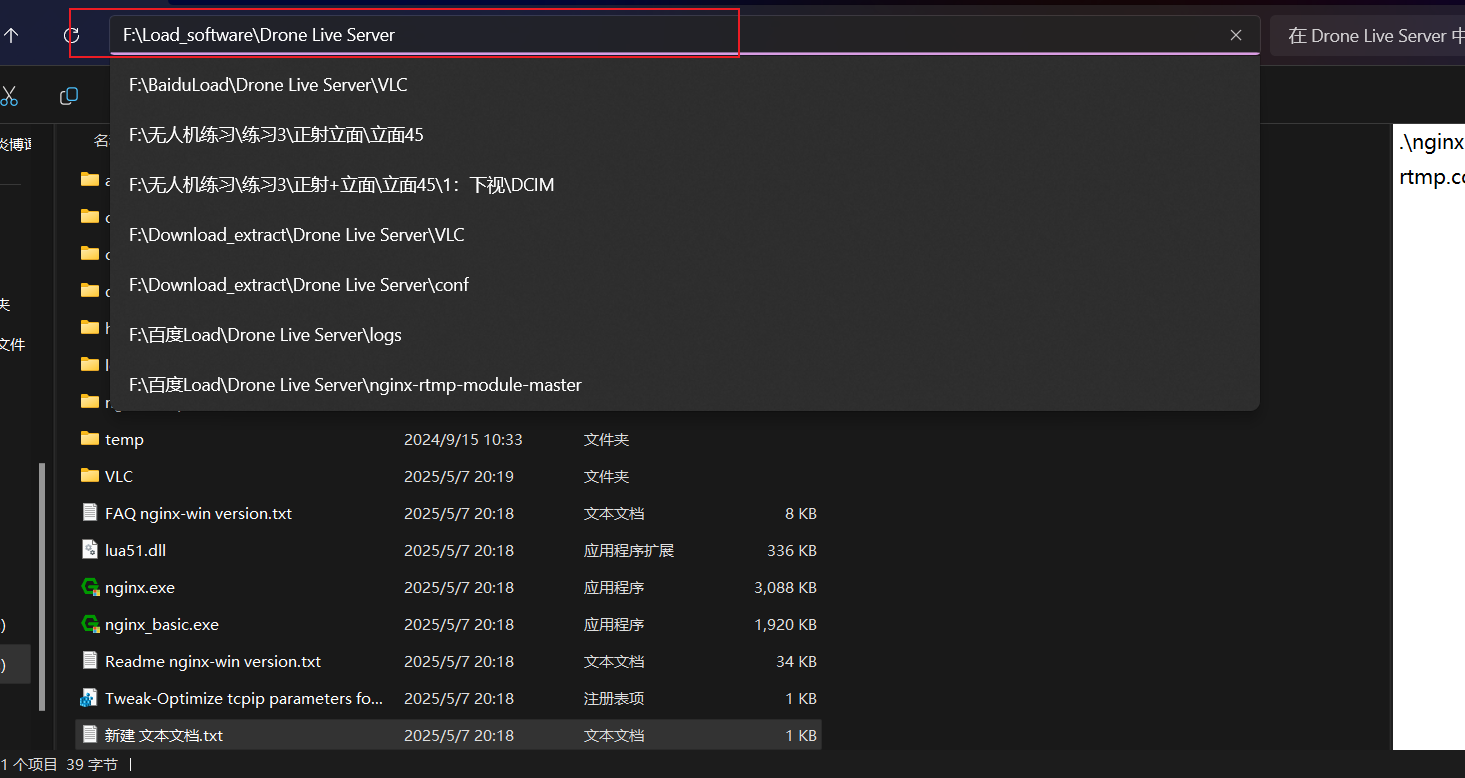
在最上方这儿点击一下,然后复制
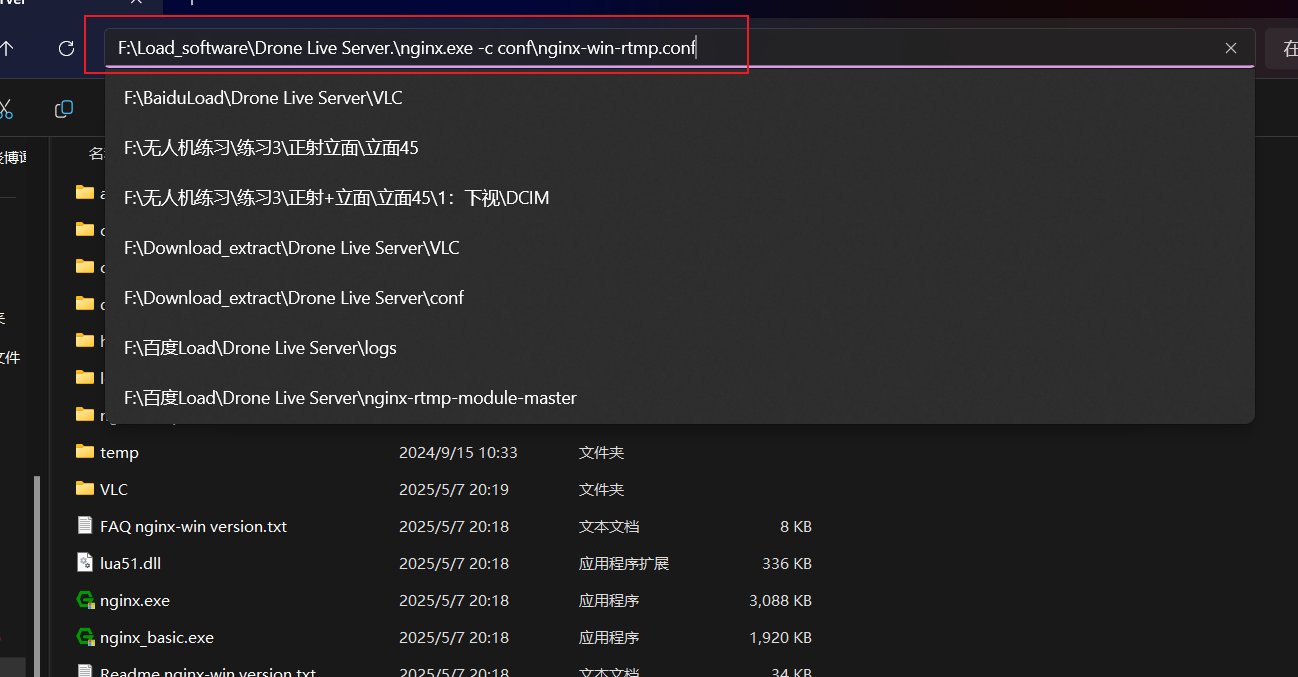
保证已启动 nginx服务,可以在任务管理器中查看

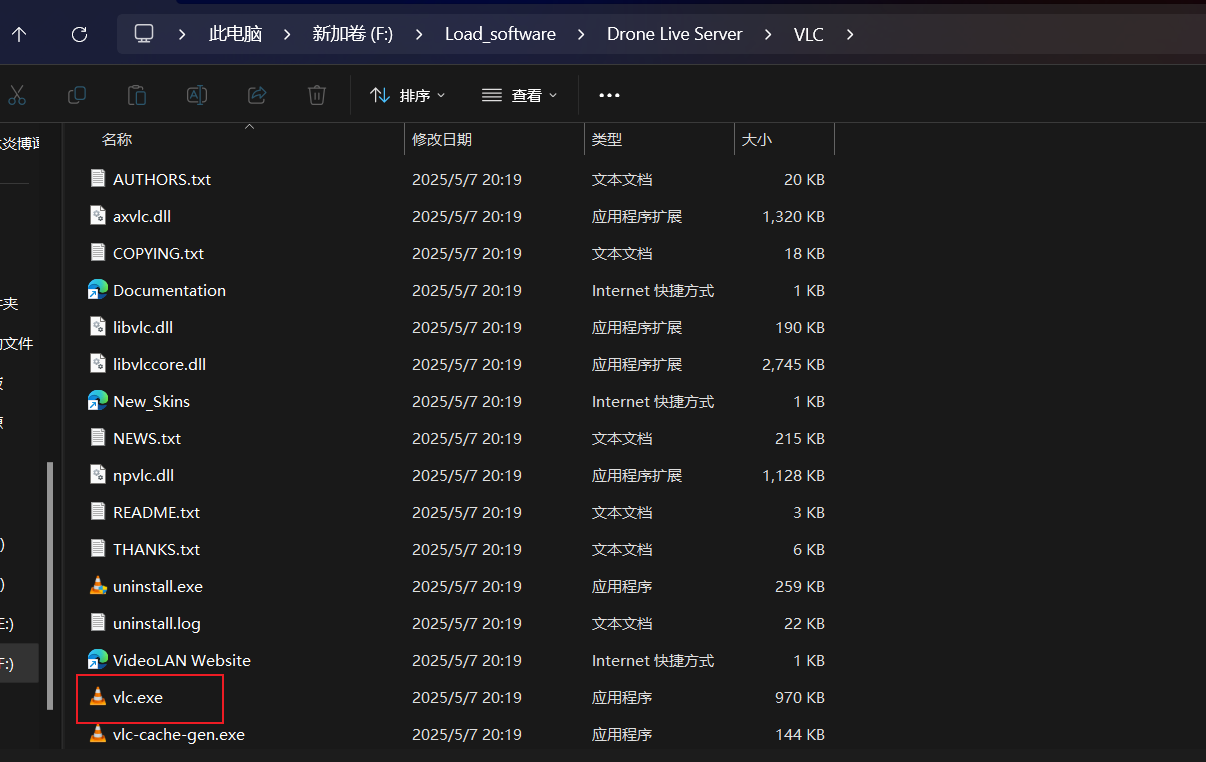
打开文件夹中的 VLC 播放器,点击 vlc.exe
打开终端,输入 ipconfig 获取自己的 ip地址(IPv4地址)
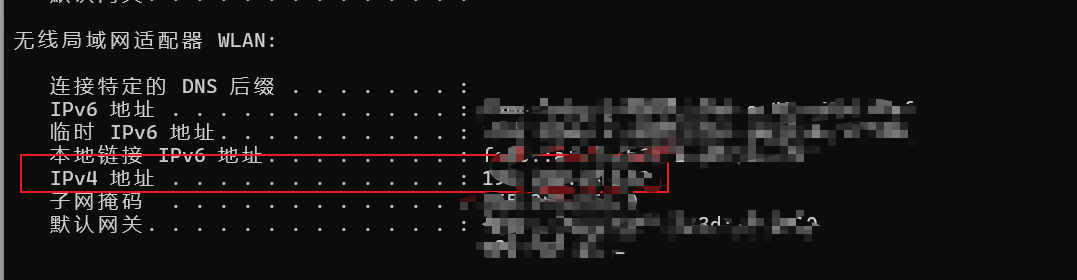
推流地址即为:
rtmp://你的ip:1935/live/home
注意!!!电脑和遥控器需处于同一网络下!!!
无人机端
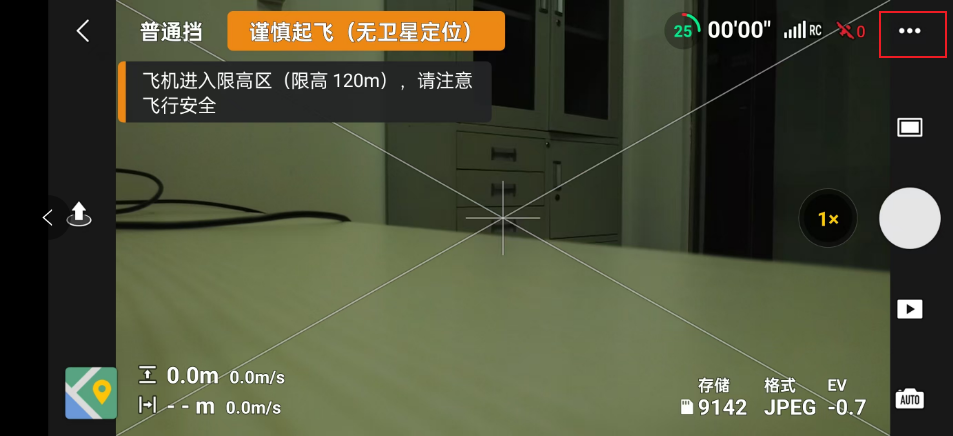
这里演示使用大疆 RC-N2 遥控器,大疆 RC Pro 的操作与之相似
点击右上角三个点
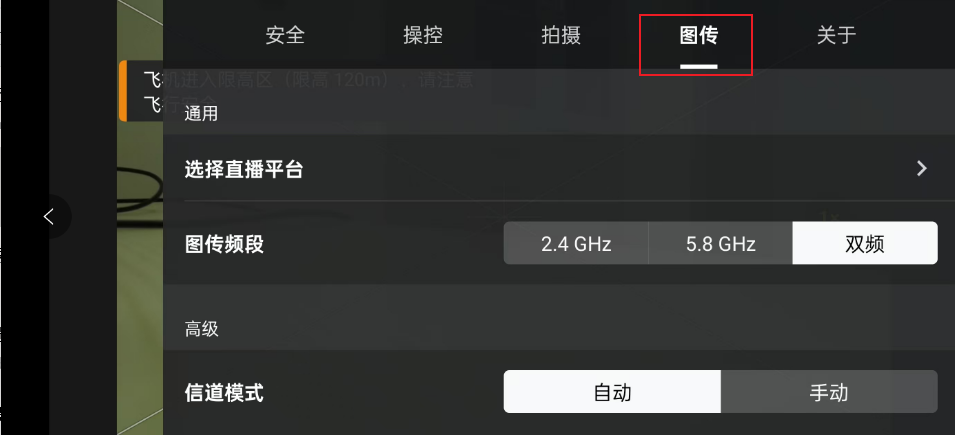
点击图传:
点击 RTMP
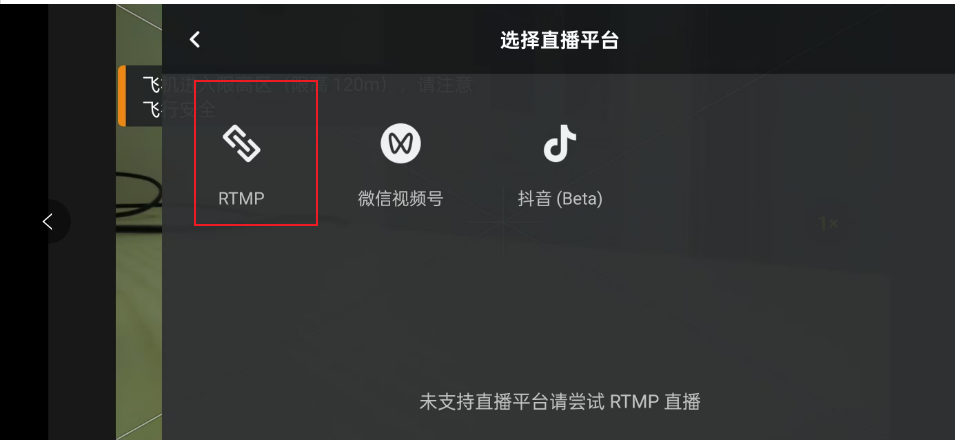
输入刚才的 rtmp 推流地址,点击开始直播

此时,无人机画面将通过局域网传到刚才配置的 nginx服务器上,即可在电脑上实现拉流
VLC拉流
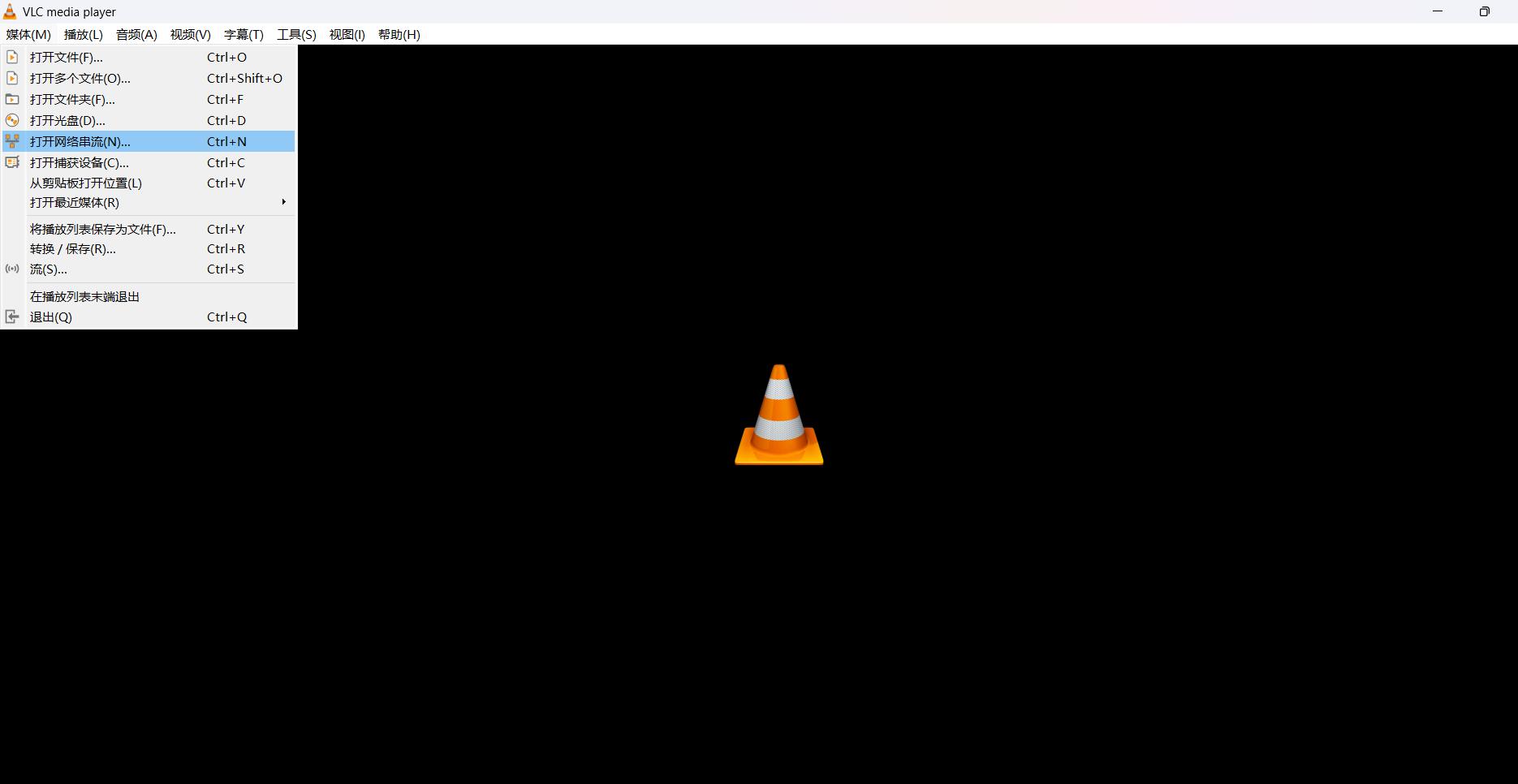
打开此文件夹,右键 vlc.exe ,选择以管理员身份运行
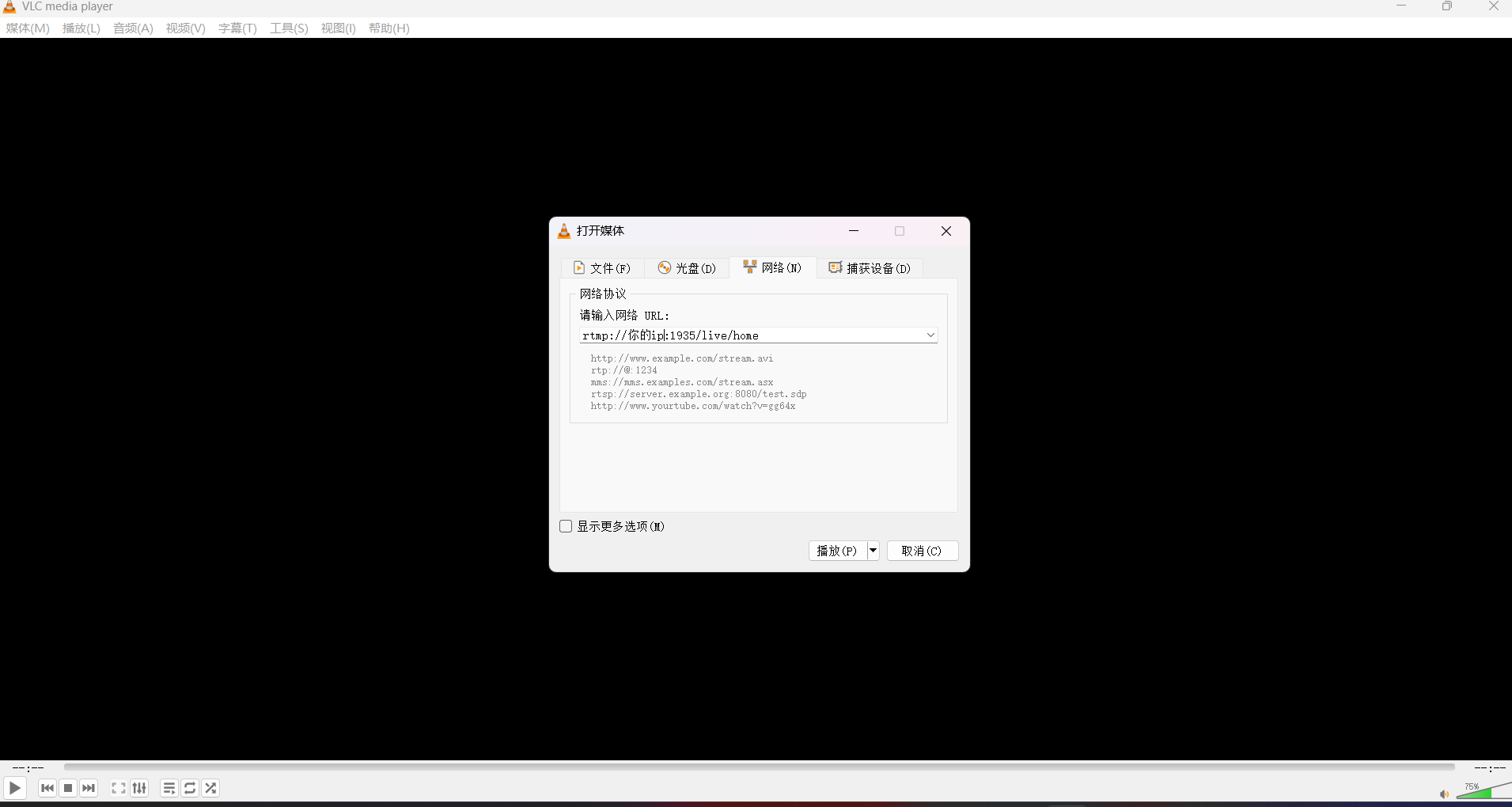
打开媒体--网络串流
输入刚才的推流地址,即可实现拉流
效果:


分析
本博客解释的解决方案最大的优点是部署方便,不用自己去配置代码,然后使用大疆所有机型。
缺点很致命,一个是有延迟,估计得有六七秒的延迟了吧,然后画面有时候还很模糊。
后面会更新更好的解决方案!
感谢您的观看!!!