Ubuntu20.04安装使用ROS-PlotJuggler
写在前面,先确保安装了ROS-Noetic,如果没有安装,可通过以下程序一键安装:
bash
wget http://fishros.com/install -O fishros && . fishros安装PlotJuggler
执行:
bash
sudo apt-get install ros-noetic-plotjuggler-ros
sudo apt-get -y install qtbase5-dev libqt5svg5-dev qtdeclarative5-dev qtmultimedia5-dev libqt5multimedia5-plugins注意:安装plotjuggler一定要带后缀ros,不带后缀ros则在plotjuggler界面streaming中选择接收数据类型则不会出现ROS Topic Subscriber。
使用Plotjuggler
执行:
bash
# 终端一
roscore
# 终端二
rosrun plotjuggler plotjuggler进入Plotjuggler界面后,先在streaming一栏处选择接收数据类型为ROS Topic Subscriber。同时在右侧设置Buffer长度,Buffer长度决定了右侧数据曲线的显示长度。建议设置为100,后续可以放大看曲线。
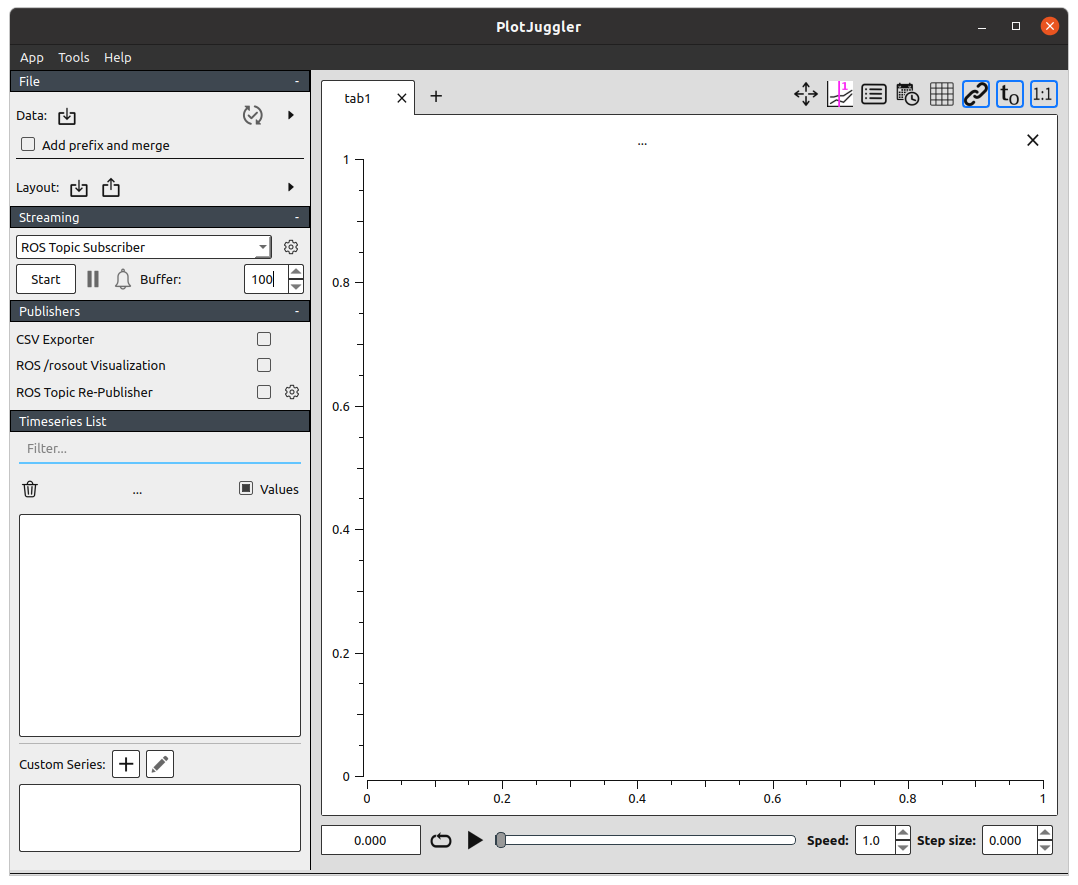
然后点击Start,若此时只是启动了ROS但是没有其它ROS代码及其消息发布,只会显示/rosout和/rosout_agg两个消息。
为便于测试,可再启动一个终端,执行:
bash
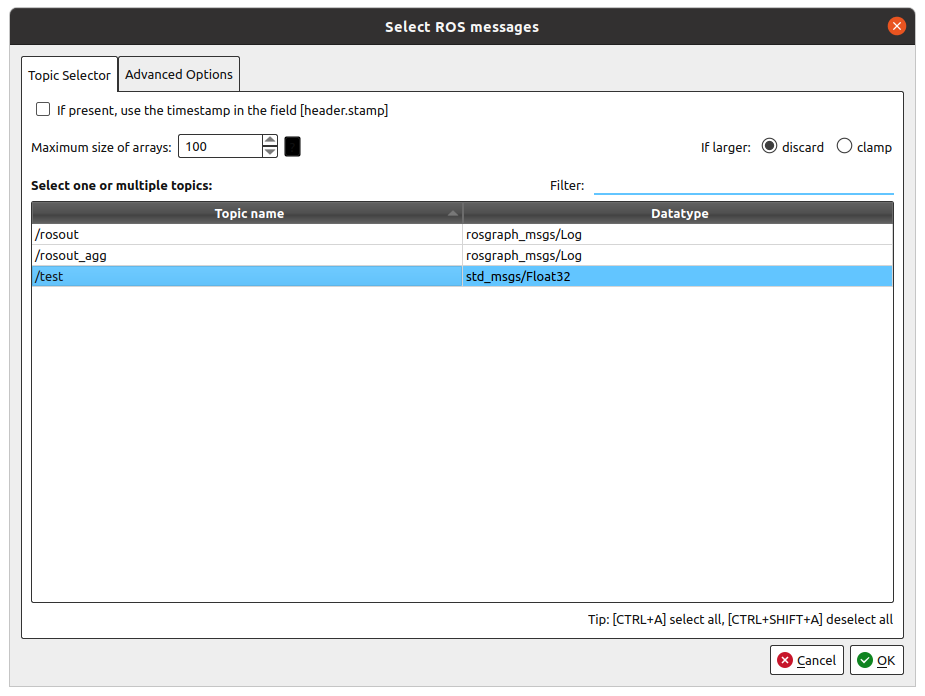
rostopic pub /test std_msgs/Float32 "data: 0.5" -r 10此时Select ROS messages界面出现一个话题名称为/test的消息,选择这个消息,并点击右下角的OK按钮。
此时回到Plotjuggler界面右侧仍然是空白的,但是左下角Timeseries List中有一个test,点开后有data,拖动data至右侧曲线框内,显示曲线,数值为0.5,并且横坐标在滚动。此时读者可自行调整Buffer大小查看右侧数据滚动速度。
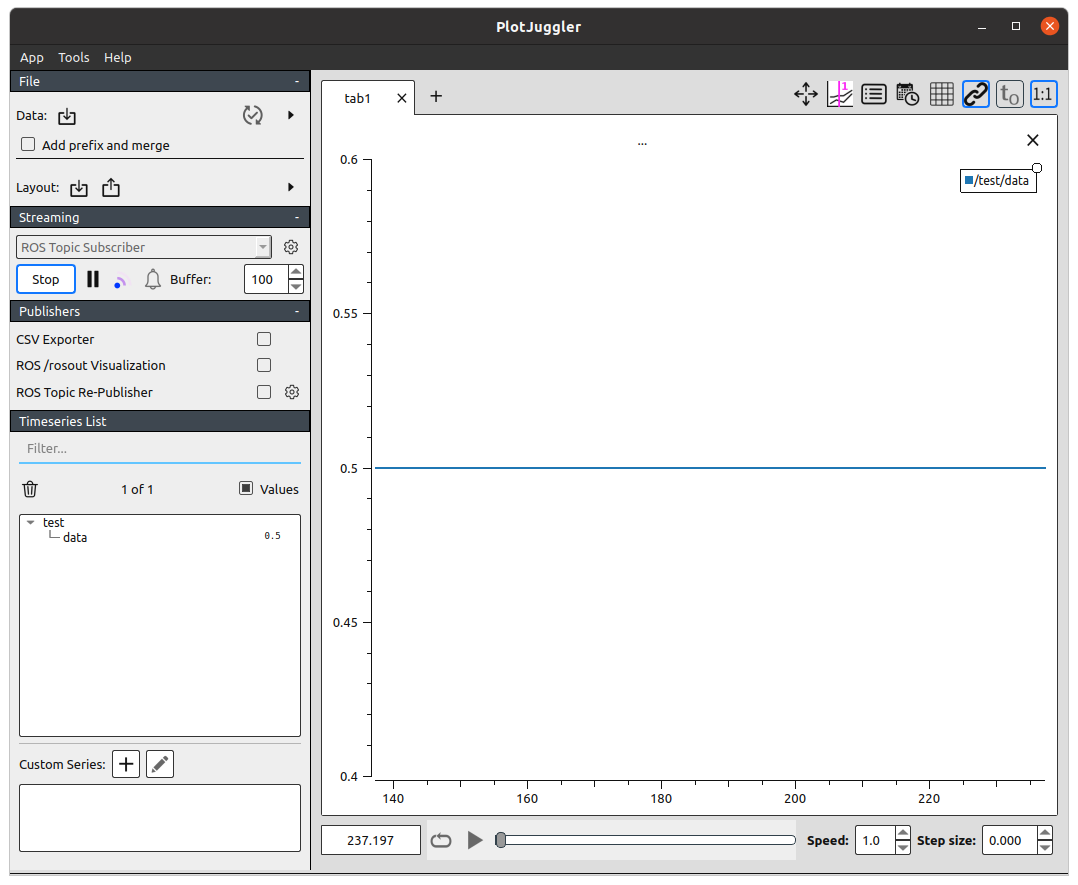 此外,当Plotjuggler正在记录数据时,右侧曲线是无法放大的。只有点击左侧的Stop,才可放大右侧曲线查看数据。
此外,当Plotjuggler正在记录数据时,右侧曲线是无法放大的。只有点击左侧的Stop,才可放大右侧曲线查看数据。
此外,还可以点击左上角Layout右边的第二个按钮,保存当前的界面参数,并在启动时点击Layout右侧的第一个按钮加载,或通过命令行启动Plotjuggler时加载:
bash
# xxx.xml根据读者保存的layout界面参数文件路径自行修改
rosrun plotjuggler plotjuggler --layout xxx.xml