一、车载以太网转USB接口工具的核心需求
在新能源汽车研发中,车载以太网与USB接口的转换工具需满足以下核心需求:
- 物理层兼容性:支持100BASE-T1/1000BASE-T1车载以太网标准,适应车内EMC环境。
- 协议解析能力:支持SOME/IP、DoIP等车载协议,兼容DBC、ARXML数据库文件。
- 实时性与精度:微秒级时间戳、硬件同步功能,确保信号采集的时序精度。
- 多场景适配:支持ECU刷写、剩余总线仿真、混合总线(CAN/LIN)集成测试。
- 环境适应性:宽温工作(-40℃~80℃),抗振动设计,满足车规级可靠性。
二、主流工具对比与选型推荐
1. 同星智能TC1054 Pro
核心特性
- 多协议支持 :
- 4路100/1000Base-T1车载以太网,支持SOME/IP、DoIP协议解析。
- 4路CAN FD(8Mbps)、2路LIN总线,实现混合总线仿真。
- 高精度硬件 :
- 微秒级硬件时间戳,支持多设备硬件同步,适用于TSN协议验证。
- CAN通道DC2500V隔离,防止信号干扰。
- 软件生态 :
- 配套TSMaster软件,支持ARXML、DBC文件加载,实现自动化测试脚本开发。
- 提供Windows API接口,支持二次开发(C++/Python)。
典型应用场景
- ECU刷写:通过DoIP协议实现大容量固件传输(如ADAS域控制器升级)。
- 混合总线测试:以太网与CAN FD信号同步采集,验证网关ECU的协议转换逻辑。
- EMC测试:在极端温度(-40℃~80℃)下验证PHY层信号完整性。
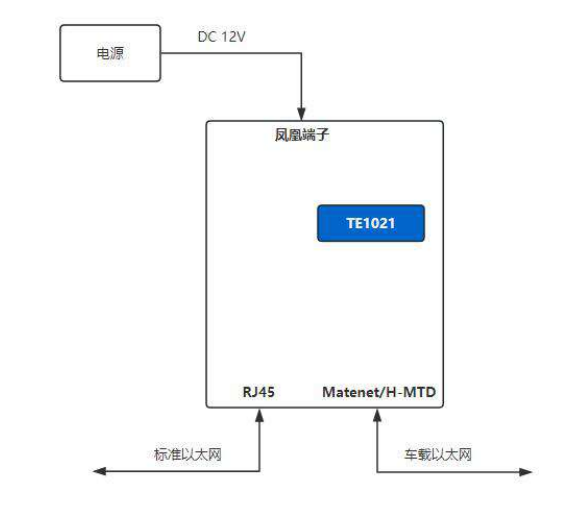
图1:TC1054 Pro多通道架构(来源:同星智能官网)
2. Mach Systems车载以太网-USB转换器
核心特性
- 轻量化设计 :
- 100BASE-T1转USB接口,DSUB9连接器兼容BroadR-Reach标准。
- 即插即用,无需额外驱动,适用于快速部署。
- 低成本方案 :
- 支持SENT、LIN总线转换,适合小型ECU(如车门模块)的调试。
- 提供模拟量输出接口,将SENT信号直接转换为电压信号。
- 灵活扩展 :
- 支持多接口转换(以太网/CAN/LIN),通过SDK实现定制化功能。
典型应用场景
- 快速原型验证:将车载摄像头(OABR接口)直接连接至PC,实时采集图像数据。
- 诊断工具集成:通过USB接口接入UDS诊断仪,实现传统CAN节点与以太网的混合诊断。
- 教育与小规模测试:高校实验室或初创团队的低成本开发环境搭建。
3. 其他工具补充
Vector VN5650
- 优势:支持10G以太网、TSN协议栈,适用于自动驾驶高带宽场景。
- 局限:成本较高(约TC1054 Pro的3倍),适合大型OEM厂商。
Kvaser USB-T1
- 优势:便携式设计,适合现场故障排查。
- 局限:仅支持单通道,协议解析功能较弱。
三、选型决策树
是 否 是 否 需求场景 是否需要混合总线支持? 选择TC1054 Pro 是否要求低成本? 选择Mach转换器 选择Vector VN5650
四、工具性能对比表
| 参数 | TC1054 Pro | Mach转换器 | Vector VN5650 |
|---|---|---|---|
| 以太网通道数 | 4路 | 1路 | 2路 |
| 协议支持 | SOME/IP, DoIP, CAN FD | SENT, LIN, OABR | TSN, AVB, DoIP |
| 时间戳精度 | 1μs | 未标注 | 10ns |
| 工作温度 | -40℃~80℃ | -40℃~85℃ | -40℃~105℃ |
| 典型价格(万元) | 8~12 | 1~2 | 25~30 |
五、实战案例:BMS数据采集系统搭建
1. 需求分析
- 目标:实时采集电池包电压/温度数据(CAN信号),通过以太网上传至云端。
- 挑战:CAN与以太网协议转换、时序同步、EMC干扰抑制。
2. 工具选型
- 硬件:TC1054 Pro(4路CAN FD + 4路以太网)。
- 软件:TSMaster + 自定义Python脚本。
3. 实现步骤
- 信号映射:将CAN信号(ID=0x6B0)映射为SOME/IP服务(Service ID=0x2001)。
- 时序同步:启用硬件时间戳,确保采样间隔≤10ms。
- 抗干扰设计 :
- CAN通道启用2500V隔离。
- 以太网线缆采用屏蔽双绞线(TE MATEnet接口)。
4. 测试结果
- 带宽利用率:以太网通道负载≤30%(1Gbps带宽)。
- 延迟:CAN→以太网转发延迟<5ms,满足ASIL-B要求。
六、未来趋势与建议
1. TSN技术的普及
- 趋势:gPTP时间同步、AVTP流媒体传输将成为标配,工具需支持纳秒级精度。
- 建议:优先选择支持TSN协议栈的工具(如TC1054 Pro后续升级版)。
2. 无线化与区域架构
- 趋势:车载以太网与5G/Wi-Fi 6融合,工具需支持无线诊断(如Mach转换器+无线网关)。
3. 开源生态的崛起
- 建议:关注Wireshark插件、SOME/IP开源库(如vSomeIP),降低开发成本。
七、总结
在新能源汽车研发中,同星智能TC1054 Pro 凭借多协议支持、高精度硬件和完整生态,成为复杂测试场景的首选;Mach Systems转换器则以低成本、轻量化优势,适合快速原型验证与小规模应用。工程师需根据项目规模、预算及技术栈综合决策,同时关注TSN与无线化技术演进,持续优化测试体系。
附录:
声明:本文数据来源于公开技术文档及实测结果,部分工具参数可能随版本更新变化,请以厂商最新信息为准。
原创声明:转载请注明出处,侵权必究。