目录
[1.1 物方和像方](#1.1 物方和像方)
[1.2 工作距离和视场](#1.2 工作距离和视场)
[1.3 放大倍率](#1.3 放大倍率)
[1.4 相机芯片尺寸](#1.4 相机芯片尺寸)
一、基本概念
1.1 物方和像方
在光学领域,物方 (Object Space)是与像方(Image Space)相对的概念,用于描述光学系统中光线或物体所在的空间区域。
- 物方 :指光学系统(如镜头、相机)中,实际物体所处的空间范围,即被观察、拍摄的对象所在的物理空间。
- 像方 :指光学系统中,物体通过光学元件成像后所在的空间范围(如相机传感器、胶片上的成像区域)。
1.2 工作距离和视场
(1)镜头工作距离(WD):镜头物方端面到被拍摄物体表面的物理距离。
(2)光源工作距离(LWD):光源物方端面到被照射物体表面 的物理距离。
(3)视场(FOV):也称视野,是指能被视觉系统观察到的物方可视范围大小。
对于镜头而言,可观察到的视场跟镜头放大倍率及相机芯片选择有关。因此通常建议根据被观察物体的尺寸,先确定所需的视场,再确定相机芯片尺寸及镜头放大倍率。在实际工程项目中,考虑到机械误差等问题,视场通常要大于待观测物体的实际尺寸,以确保在机械误差的范围内,物体始终位于视觉系统的可视范围内。
1.3 放大倍率
机器视觉行业里提到的镜头光学放大倍率通常是指垂轴放大倍率,即像和物的大小之比,计算方法如下:
光学放大倍率=感光芯片长边/视野长边
可见,光学放大倍率和所选相机芯片及所需视场相关。
【示例1】
问题:已知相机芯片为2/3英寸(8.8mm*6.6mm),视场长宽为:10mm* 8mm,计算放大倍率。
解答:
如用长边计算,放大倍率=8.8mm/10mm=0.88x;
如用短边计算,放大倍率=6.6mm/8mm=0.825x;
此时应取小的倍率0.825x 作为待选镜头的光学放大倍率。否则,短边视场将不能满足要求。(若取0.88倍,则短边视场=6.6mm/0.88x=7.5mm<8mm)。
在实际工程项目中,通常无需长短边都计算。经验的方法是:若视场接近于正方形或圆形,则取短边计算;若视场为长条形,则取长边计算。
1.4 相机芯片尺寸
在前面描述放大倍率和镜头像面尺寸时都涉及到相机芯片尺寸。通常相机厂商是以英寸的形式表示的,但在实际计算时,需要换算成各边以毫米为单位的计量方式。
但对于相机芯片尺寸而言,1 inch≠ 25.4mm,而有其特有的换算关系。以下是常见的尺寸对应关系:
bash
1.1英寸------靶面尺寸为宽12mm*高12mm,对角线17mm
1英寸 ------靶面尺寸为宽12.7mm*高9.6mm,对角线16mm
2/3英寸------靶面尺寸为宽8.8mm*高6.6mm,对角线11mm
1/1.8英寸------靶面尺寸为宽7.2mm*高5.4mm,对角线9mm
1/2英寸------靶面尺寸为宽6.4mm*高4.8mm,对角线8mm
1/3英寸------靶面尺寸为宽4.8mm*高3.6mm,对角线6mm
1/4英寸------靶面尺寸为宽3.2mm*高2.4mm,对角线4m最准确的芯片尺寸计算方法是:
相机像素颗数x像素尺寸=芯片尺寸。如某相机分辨率为5120x5120, 像素尺寸为4.5µmx4.5µm, 则芯片为正方形,边长=5120x4.5µm=23040µm=23.04mm。
二、公式计算
根据前面的概念介绍,可以得出面阵相机镜头选型的核心计算公式:
光学放大倍率 = 相机芯片长度 / 视野长边 = 焦距f / 工作距离WD
示意图如下:
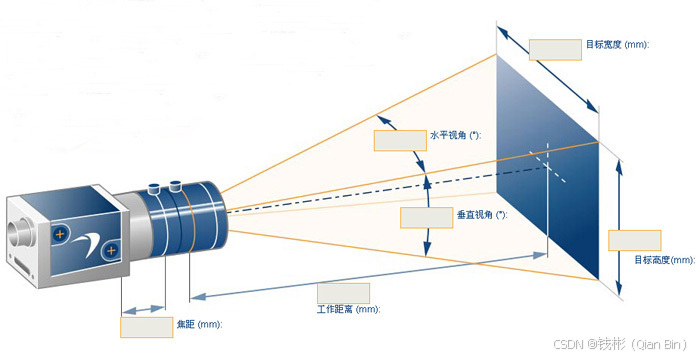
按照前面的核心公式,工业镜头的焦距(f mm)可以根据FOV(视场), WD(工作距离) 和芯片尺寸计算出来:
焦距计算公式:
焦距f = WD × 芯片尺寸 / FOV
三、实例应用
问题:已知参数如下:
(1)相机配置为: 芯片长宽为5.7*4.3mm, 分辨率为:2592*1944, 像元尺寸为2.2*2.2um
(2)物距:60mm
(3)视野大小:12mm*9mm
应选择何种镜头?
答案:按照前面公式 焦距1 = 60*4.3/9 = 28.7 焦距2 = 60*5.7/12 = 28.5
为了能覆盖视野,选择更短的焦距,因此应选择28.5mm焦距的镜头。