测功机是测量电机性能的绝佳工具。通过施加可控负载,测功机可表征电机扭矩、转速和功率。但这是获取电机性能全面理解的唯一途径吗?我们想知道,能否仅通过电机-螺旋桨动力测试台(而非传统制动测功机)实现电机性能测绘。
目录
- 实验设置
- 电机功耗图
- 电机效率图
1. 实验设置
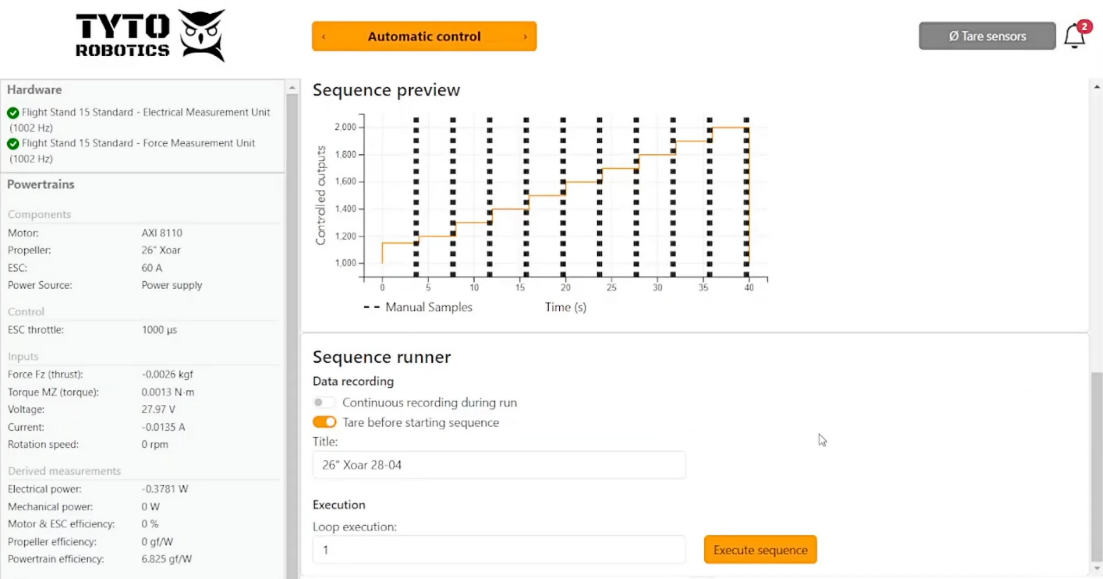
我们使用Flight Stand 15动力测试台测量电机性能,包括扭矩、转速、功率等参数。
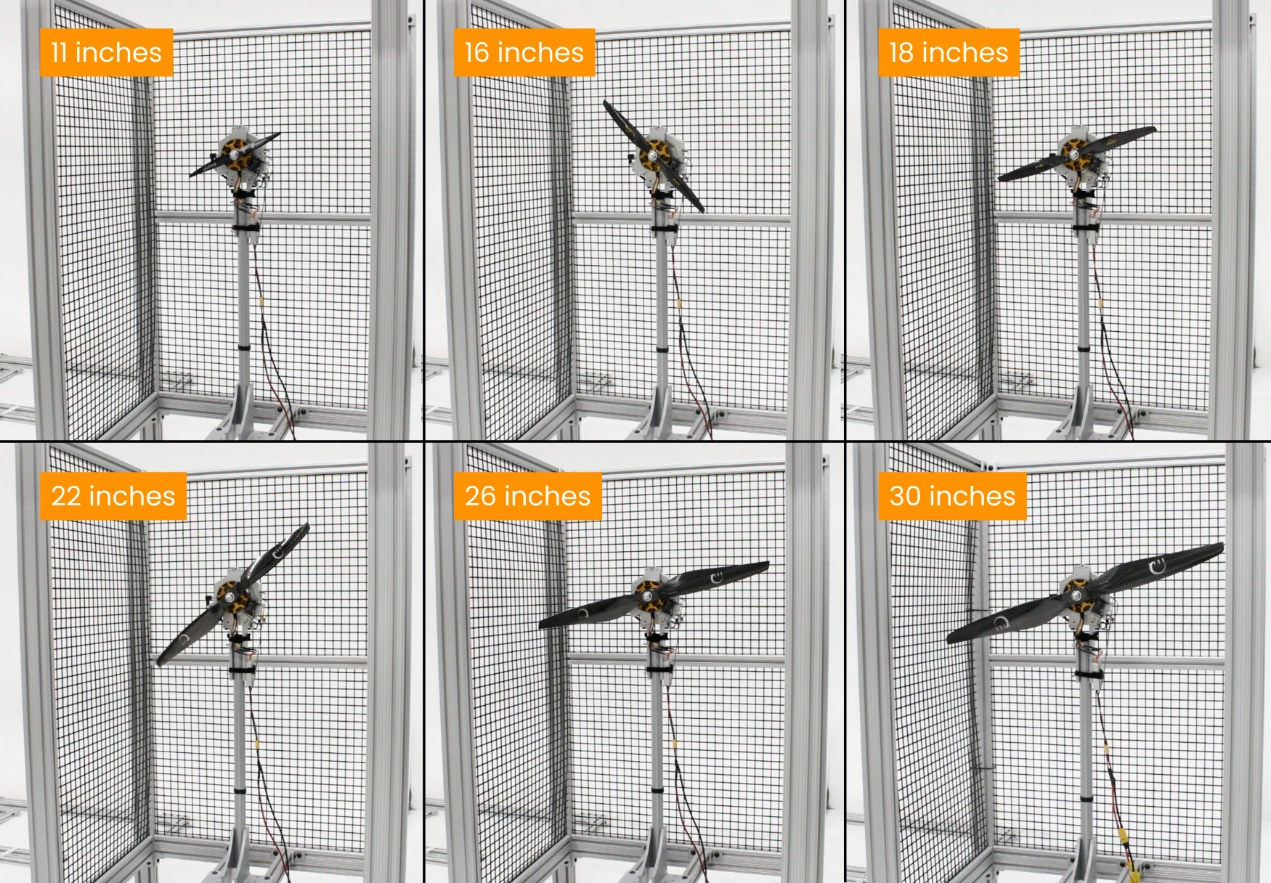
在电机上安装6款不同品牌的螺旋桨作为负载,尺寸分别为:
- 11英寸
- 16英寸
- 18英寸
- 22英寸
- 26英寸
- 30英寸
通过Flight Stand软件设计自动化阶梯测试,油门从1150微秒至2000微秒分10档递增,对每个螺旋桨重复测试。数据通过软件记录并导出为.CSV文件,随后利用Google Colab笔记本执行Python代码生成电机性能图。(代码可复用,需确保数据单位与列名一致或调整代码适配。)
2. 电机功耗图
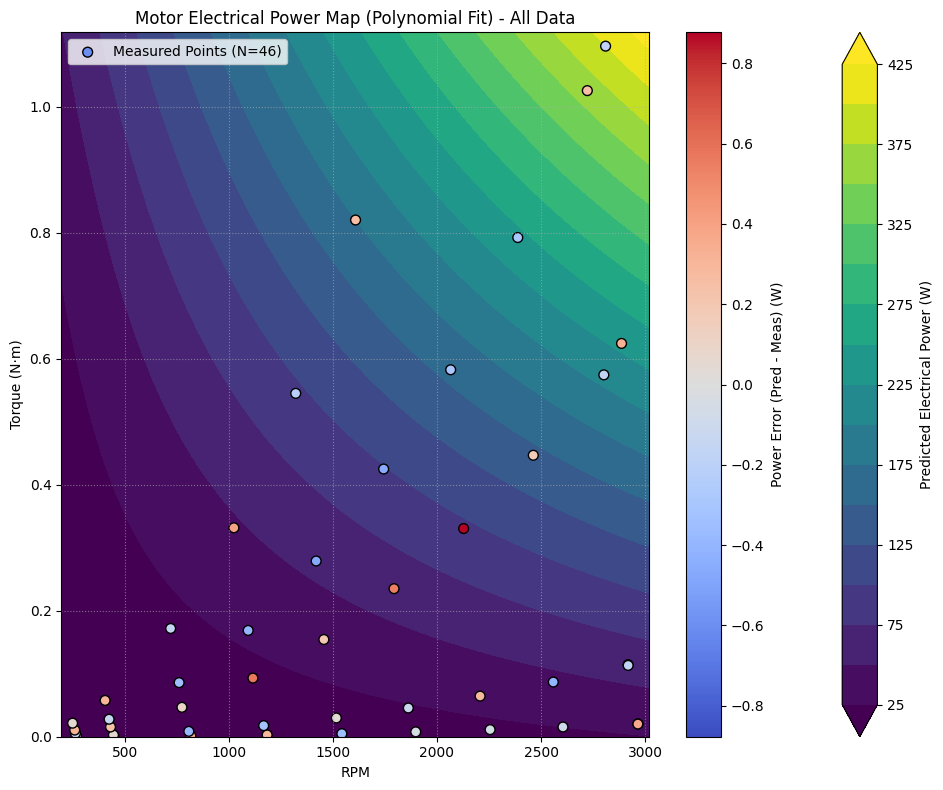
下图展示四个变量:
- X轴:转速(RPM)
- Y轴:扭矩(牛·米)
- 等高线:建模后的电功率
- 数据点颜色:实测值与模型预测值的功率误差(瓦)
通过三次多项式拟合数据,预测结果以25瓦为间隔分段显示。模型最大误差为0.8瓦(实测功率150瓦时),即0.5%。
3. 电机效率图
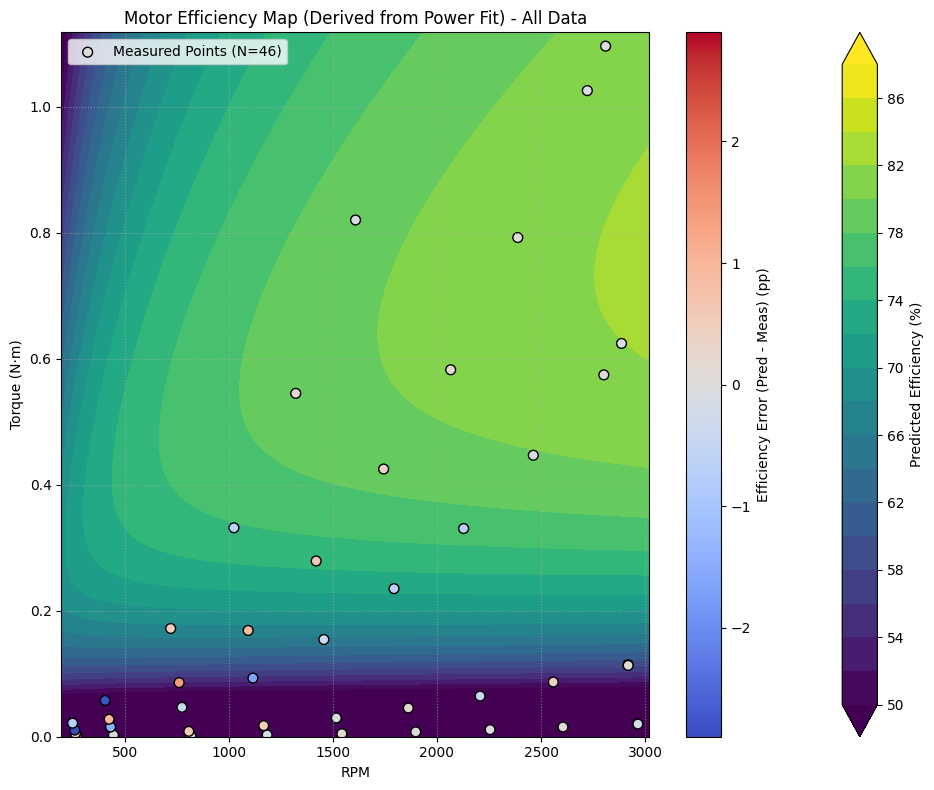
效率图基于前文的功耗图生成。
- 色块:预测效率(每块代表2%范围)。
- 低效区(<50%):测量误差达3个百分点(因功率和扭矩较低)。
- 高效区(74%-86%):误差小于1个百分点。
结论
无需传统制动测功机,通过Flight Stand动力测试台结合三次多项式建模,即可绘制电机功耗与效率图,并预测未测试配置的性能。