文章目录
运行结果
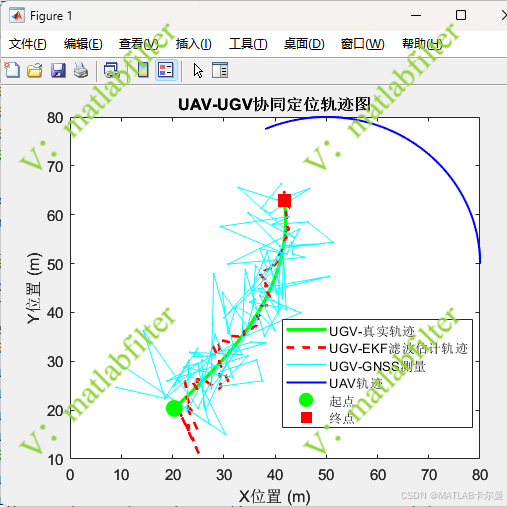
轨迹图:
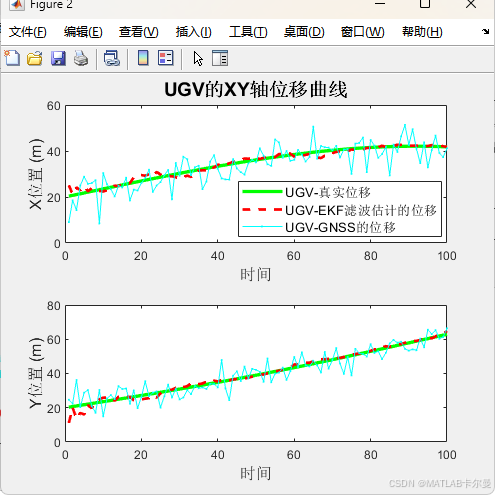
位移曲线:
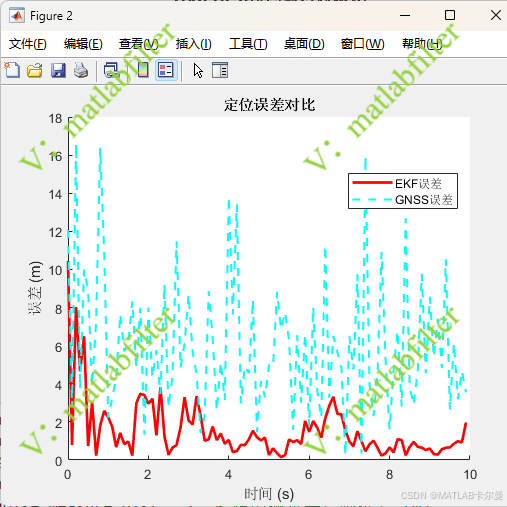
位置误差曲线:
柱状图输出结果对比:
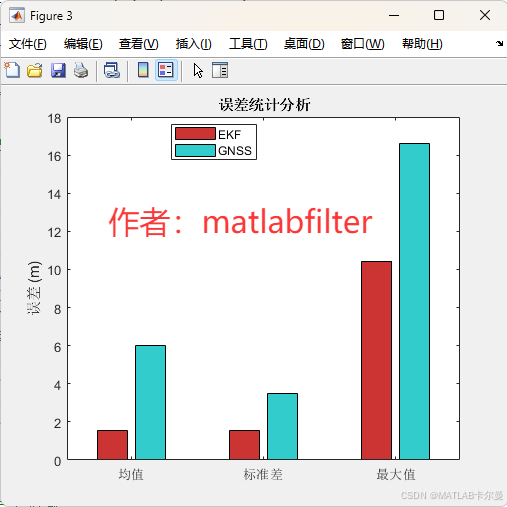
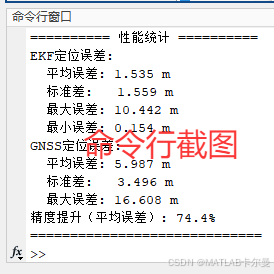
命令行输出结果对比:
MATLAB源代码
部分代码如下:
matlab
%% UAV辅助的UGV协同定位仿真
% UAV通过测距测角辅助UGV进行精确定位
% 作者:matlabfilter(V同号,可接导航、定位相关的代码定制)
% 2026-01-07/Ver1
clear; close all; clc;
rng(0);
%% 仿真参数设置
dt = 0.1; % 时间步长 (s)
T = 10; % 总仿真时间 (s)
steps = T/dt; % 仿真步数
% UAV参数
uav_altitude = 50; % 飞行高度 (m)
uav_orbit_radius = 30; % 轨道半径 (m)
uav_angular_vel = 0.2; % 角速度 (rad/s)
uav_pos = [50; 50]; % 初始位置 [x; y] (m)
% UGV参数
ugv_real_pos = [20; 20]; % 真实初始位置 (m)
ugv_est_pos = [20.5; 20.5]; % 估计初始位置 (m)
ugv_velocity = 5; % 速度 (m/s)
ugv_heading = pi/4; % 航向角 (rad)
% 噪声参数
noise_process = 0.1; % 过程噪声标准差
noise_measure_dist = 1; % 距离测量噪声标准差 (m)
noise_measure_ang = 0.1; % 角度测量噪声标准差 (rad)
noise_GNSS = 5; % GNSS噪声标准差 (m)更多代码:https://blog.csdn.net/callmeup/article/details/156692509?spm=1011.2415.3001.5331
程序介绍
该程序为UAV 辅助 UGV 的二维协同定位仿真框架 ,用于验证在低精度 G N S S GNSS GNSS条件下,引入空中平台测距测角信息对地面移动载体定位精度的提升效果。整体思路是通过 U A V -- U G V UAV--UGV UAV--UGV的异构平台协同,利用空间几何优势弥补单一地面传感器观测能力不足的问题。
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者