核心硬件设计要点

通信协议与数据传输
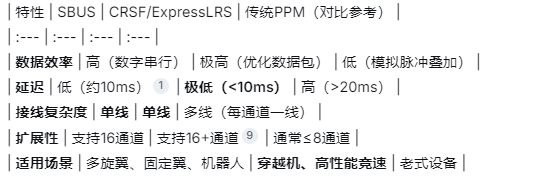
首选协议:数字串行协议
SBUS (Futaba):最常用的协议之一。它将16个通道的11位数据(每通道值范围192-1792)打包成一帧(25字节),通过单根信号线以固定100kbps的波特率发送,刷新率可达100Hz(延迟≤10ms),极大简化了布线。
CRSF/ExpressLRS:新兴的高性能开源协议,以高刷新率(最高可达333Hz)、低延迟和远距离著称,是穿越机和专业应用的流行选择。
D-BUS (大疆):大疆的类似协议,同样支持16通道单线传输。
协议对比与选择
双向传输(遥测):现代遥控器普遍支持双向传输,能将飞行器电池电压、GPS坐标等数据回传到遥控器屏幕显示,这对安全飞行至关重要。
用户体验与软件功能
通道分配与混控:16个通道需灵活分配。除了基础的4通道(滚转、俯仰、油门、偏航),富余通道可用于:飞行模式切换、云台控制、相机控制、任务载荷操作、启用自动返航等。混控功能允许将多个输入逻辑组合后映射到通道,是实现复杂动作(如固定翼的襟副翼混控)的基础。
模型记忆与配置:应支持存储多组(如30组)完全独立的模型配置,方便用户在多个飞行器间切换。
教练模式:允许一台遥控器(教练机)将控制权安全地转移给另一台(学员机),用于飞行教学。
固件升级与开源:通过USB(如Type-C)在线升级固件。部分平台(如支持EdgeTX/OpenTX的遥控器)提供高度可定制化的开源固件。
系统集成与测试要点
与飞控的兼容性:确保遥控器输出的协议(如SBUS、CRSF)能被目标飞控(如Pixhawk系列、Betaflight、iNav)正确识别。
可靠性设计:
失控保护:当信号丢失时,接收机应按预设指令(如悬停、降落、返航)自动执行,防止事故。
天线设计:优化PCB天线或使用外接天线,确保全向信号覆盖。
测试验证:
拉距测试:在空旷环境实测有效控制距离,应满足设计目标(如1000米)。
延迟测试:从摇杆输入到飞控接收到指令的总延迟应尽可能低(理想情况<20ms)。
压力测试:长时间满通道操作,测试系统稳定性和发热情况。
