- 支持多机器人系统: 更好地处理多机器人之间的通信和协调。
- 跨平台兼容: 支持 Linux、macOS 和 Windows。
- 实时性: 为实时控制回路提供更好的支持。
- 适用于嵌入式设备: 可以在资源受限的微控制器上运行。
- 改进的安全性: 提供节点间的安全通信机制。
- 更好的生命周期管理: 为节点提供标准化的状态管理。
- 商业友好: 使用 Apache 2.0 许可证,更易于商业化应用。
- 利用现有技术: 尽可能采用成熟的工业标准,如 DDS。
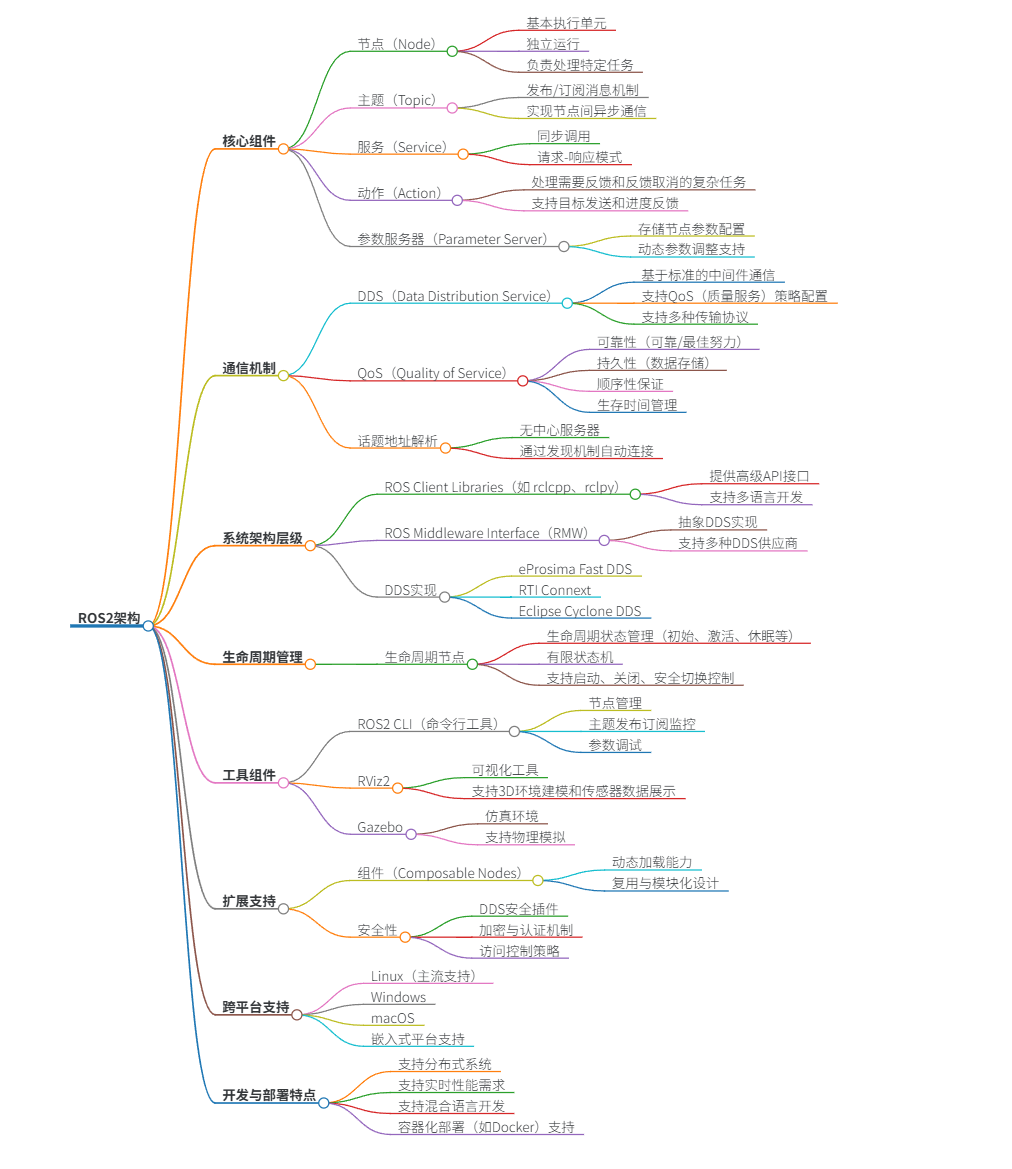
ROS 2 的分层架构 (概念性):
可以从下往上理解 ROS 2 的架构层次:
ROS 2 深度解析:新一代机器人操作系统框架
摘要: ROS 2 (Robot Operating System 2) 是一个用于构建复杂、健壮机器人应用程序的开源软件框架。它并非传统意义上的操作系统,而是一个包含库、工具和约定的集合,旨在应对现代机器人系统在多机器人协作、实时性、安全性、跨平台兼容性以及商业化应用等方面的挑战。本文将深入探讨 ROS 2 的核心设计理念、分层架构、关键组件、通信机制以及其相较于 ROS 1 的主要改进。
一、ROS 2 的诞生背景与核心目标
ROS 1 在机器人领域取得了巨大成功,但随着机器人技术的发展,其固有的局限性逐渐显现。例如,依赖中心化的 roscore 节点、有限的实时性支持、较弱的安全性以及对多机器人系统和嵌入式设备支持不足等。
为了解决这些问题,ROS 2 进行了彻底的重新设计,其核心设计目标包括:
- 支持多机器人系统: 原生支持去中心化的发现与通信,更好地处理多机器人之间的协调。
- 跨平台兼容: 官方支持 Linux、macOS 和 Windows 主流操作系统。
- 提升实时性: 为实时控制回路提供更确定性的行为和更好的支持。
- 适用于嵌入式设备: 优化资源消耗,使其能在资源受限的微控制器(如 micro-ROS)上运行。
- 改进的安全性: 提供节点间的身份验证、访问控制和加密通信机制。
- 更好的生命周期管理: 为节点提供标准化的状态管理,增强系统的可控性和鲁棒性。
- 商业友好: 采用 Apache 2.0 许可证,降低商业化应用的门槛。
- 利用现有技术: 尽可能采用成熟的工业标准,如 DDS (Data Distribution Service) 作为核心通信中间件。
二、ROS 2 的分层架构
ROS 2 的架构设计清晰且分层,便于理解和扩展。从下往上,其概念性架构层次如下:
+------------------------------------------------------+
| 用户应用程序层 |
| (用户编写的机器人逻辑、算法、特定应用节点等) |
| (e.g., Navigation2, MoveIt2, Custom Algorithms) |
+------------------------------------------------------+
| ROS 客户端库层 (RCL - ROS Client Libraries) |
| (为用户提供编程接口,如 rclcpp, rclpy, rclc) |
+------------------------------------------------------+
| ROS 中间件接口层 (RMW API - ROS Middleware API) |
| (定义ROS如何与底层通信系统交互的抽象接口) |
+------------------------------------------------------+
| DDS / 中间件实现层 (RMW Implementation) |
| (具体的通信中间件实现,如 Fast DDS, Cyclone DDS等) |
+------------------------------------------------------+
| 操作系统 / 硬件层 |
| (Linux, Windows, macOS, RTOS, 嵌入式板卡等) |
+------------------------------------------------------+- 操作系统/硬件层: 提供基础的计算和通信能力。
- DDS/中间件实现层: 这是 ROS 2 通信的核心。默认使用 DDS 实现,如 eProsima Fast DDS。这一层负责实际的数据传输、节点发现等。
- ROS 中间件接口层 (RMW API): 这是一个抽象层,将 ROS 的通信概念(如发布/订阅、服务)与底层的具体中间件实现解耦。这使得 ROS 2 可以灵活地切换不同的 DDS 供应商,甚至支持非 DDS 中间件。
- ROS 客户端库层 (RCL): 为应用程序开发者提供易于使用的 API。
rclcpp用于 C++,rclpy用于 Python,rclc用于 C (主要面向微控制器)。开发者通过 RCL 与 ROS 2 系统交互。 - 用户应用程序层: 开发者基于 RCL 编写的节点、库和工具,实现机器人的具体功能。
三、核心组件与概念详解
1. 节点 (Nodes)
- 定义: 节点是 ROS 2 中最基本的计算单元,通常负责机器人系统中的一个特定、独立的功能(例如:传感器驱动、电机控制、路径规划、图像处理)。
- 特点: 每个节点都是一个独立的可执行程序(或进程内的组件)。节点之间通过 ROS 2 的通信机制进行数据交换和协调。
- 组件 (Components): 为了提高效率并减少进程间通信的开销(特别是在资源受限的系统中),ROS 2 鼓励将节点实现为"组件"。组件是可以动态加载到单个进程中的共享库。多个组件可以在同一个进程中运行,它们之间的通信可以使用更高效的进程内通信。
2. 通信机制
ROS 2 的核心是其强大且灵活的通信系统,主要基于 DDS (Data Distribution Service) 标准。
a. DDS (数据分发服务)
- 是什么: DDS 是一个由 OMG (Object Management Group) 制定的开放工业标准,专为实时、高性能、可扩展和可靠的以数据为中心的发布/订阅系统而设计。
- 为什么 ROS 2 选择 DDS:
-
- 去中心化发现: 节点可以自动发现网络中的其他节点和主题,无需像 ROS 1 中的
roscore主节点,消除了单点故障。 - 丰富的 QoS (Quality of Service) 策略: DDS 允许对数据传输的可靠性、持久性、延迟、历史记录等方面进行精细控制,以适应不同场景的需求。
- 传输多样性: DDS 实现通常支持多种底层传输协议(如 UDPv4/v6 单播/多播, TCP, 共享内存),可根据网络条件和性能要求选择。
- 互操作性: 不同厂商的 DDS 实现遵循 DDSI-RTPS (Real-Time Publish-Subscribe) 有线协议,理论上可以互通。
- 工业验证: DDS 已在航空航天、国防、金融、工业自动化等要求严苛的领域得到广泛应用和验证。
- 去中心化发现: 节点可以自动发现网络中的其他节点和主题,无需像 ROS 1 中的
- RMW (ROS Middleware Interface): 如前所述,ROS 2 通过 RMW 抽象层与 DDS 交互,而不是直接使用 DDS API。这提供了灵活性,允许用户选择不同的 DDS 实现或未来支持其他中间件。
b. 主题 (Topics) - 发布/订阅模型
- 机制: 这是 ROS 2 最基础的异步通信方式。一个节点可以发布 (publish) 消息到一个命名的数据通道,称为主题 (Topic) 。其他对该主题数据感兴趣的节点可以订阅 (subscribe) 该主题以接收这些消息。
- 消息 (Messages): 在主题上传输的数据具有预定义的结构,称为消息。消息类型使用
.msg文件描述(例如,geometry_msgs/msg/Twist用于速度指令)。 - 特点:
-
- 异步通信: 发布者发送消息后不等待响应。
- 多对多: 一个主题可以有多个发布者和多个订阅者。
- 解耦: 发布者和订阅者在时间、空间上都是解耦的,它们不需要知道对方的存在。
- 适用场景: 适用于连续的数据流,如传感器读数(激光雷达、摄像头、IMU)、机器人状态(里程计、关节状态)、日志信息等。
c. 服务 (Services) - 请求/响应模型
- 机制: 一种双向、同步(通常)的通信方式。一个节点(客户端)发送一个请求 (Request) 到另一个节点(服务器),服务器处理请求并返回一个响应 (Response)。
- 服务定义: 使用
.srv文件描述,包含请求部分和响应部分的数据结构。 - 特点:
-
- 同步(阻塞式): 客户端通常会等待服务器的响应。
- 一对一(逻辑上): 一个请求对应一个响应。
- 适用场景: 适用于需要远程过程调用 (RPC) 的场景,如触发一个特定动作(拍照、启动电机)、查询一个特定状态(获取配置参数)、执行一个计算任务并返回结果等。
d. 动作 (Actions) - 长时间任务与反馈
- 机制: 用于执行需要较长时间才能完成的任务,并在此过程中提供持续的反馈,同时允许任务被取消。
- 组成:
-
- 目标 (Goal): 客户端发送给动作服务器的目标指令。
- 反馈 (Feedback): 动作服务器在执行目标过程中周期性地发送给客户端的进度信息。
- 结果 (Result): 任务完成后(成功、失败或被取消),动作服务器发送给客户端的最终结果。
- 动作定义: 使用
.action文件描述目标、反馈和结果的数据结构。 - 特点:
-
- 异步执行: 客户端发送目标后不必阻塞等待。
- 可抢占/可取消: 客户端可以请求取消正在执行的动作。
- 持续反馈: 客户端可以实时了解任务进展。
- 适用场景: 适用于复杂的、耗时较长的任务,如机器人导航到目标点、机械臂执行抓取序列、长时间的数据处理等。
3. 参数 (Parameters)
- 定义: 节点在运行时可以配置的值。每个节点都可以维护一组参数,这些参数可以在启动时从文件加载,也可以在运行时通过 ROS 2 的参数 API 动态查询和修改。
- 特点: 用于调整节点的行为,如 PID 控制器的增益、传感器的采样率、路径规划的容忍度等。
- 类型: 支持多种数据类型,如布尔型、整型、浮点型、字符串以及这些类型的数组。
4. 生命周期管理 (Lifecycle Management / Managed Nodes)
- 目的: 为 ROS 2 节点提供一个标准化的状态机,使其启动、关闭、配置和错误处理等行为更加可预测和可控。这对于构建健壮的、可管理的复杂机器人系统至关重要。
- 状态: 主要包括
Unconfigured(未配置),Inactive(非活动),Active(活动),Finalizing(正在终止),ErrorProcessing(错误处理中) 等。 - 转换: 节点通过预定义的转换(如
configure,activate,deactivate,cleanup,shutdown)在这些状态之间切换。这些转换可以由外部系统(如启动系统或其他节点)触发。 - 优点: 允许系统以协调的方式管理节点,例如,确保所有传感器在控制节点激活前都已配置并激活。
5. 服务质量 (Quality of Service - QoS)
- 定义: 源自 DDS 的一个强大功能,QoS 是一系列策略,用于精确控制通信的可靠性、持久性、时效性等方面。发布者和订阅者(以及服务客户端/服务器)可以为其通信端点指定 QoS 配置文件。
- 常用 QoS 策略:
-
- Reliability (可靠性):
-
-
BEST_EFFORT:尽力而为,可能丢包(类似 UDP),低延迟,适用于高频但不关键的数据。RELIABLE:保证送达,会进行重传(类似 TCP),适用于不能丢失的关键数据。
-
-
- Durability (持久性):
-
-
VOLATILE:仅将数据发送给当前在线的订阅者。TRANSIENT_LOCAL:发布者会为后加入的订阅者保留最近发布的N条消息。PERSISTENT:(理论上,较少 DDS 实现完全支持)数据会持久化存储,即使发布者重启也能恢复。
-
-
- History (历史记录):
-
-
KEEP_LAST:在发送队列或接收队列中保留最新的 N 条消息。KEEP_ALL:保留所有消息(需注意内存消耗)。
-
-
- Depth (深度): 与
KEEP_LAST结合使用,指定 N 的值。 - Deadline: 期望数据更新的最大时间间隔,超时未收到新数据会触发回调。
- Lifespan: 消息的有效时间。
- Liveliness: 节点宣告自身存活的机制。
- Depth (深度): 与
- 应用: QoS 策略的兼容性决定了通信双方是否能成功连接。例如,一个请求
RELIABLE的订阅者无法与一个只提供BEST_EFFORT的发布者建立可靠连接(除非 DDS 实现有特定转换)。开发者需要根据数据的重要性和特性选择合适的 QoS 策略。
6. 安全性 (SROS2 - Secure ROS 2)
- 目的: 为 ROS 2 系统提供节点间的安全通信,防止未授权访问、数据篡改和窃听。
- 机制: SROS2 基于 DDS Security 标准,利用公钥基础设施 (PKI) 和访问控制列表 (ACL) 实现:
-
- 身份验证 (Authentication): 确认通信参与者的身份。
- 访问控制 (Access Control): 精确定义哪些节点可以发布/订阅哪些主题,可以调用/提供哪些服务或动作。
- 加密 (Encryption): 对传输中的数据进行加密,保护数据机密性。
- 组件: 主要通过配置文件(如权限文件
permissions.xml)、密钥库 (keystore) 和身份证书来配置和管理安全策略。
四、工具与生态系统
ROS 2 拥有一个不断发展的工具集和生态系统:
- 构建系统 (Build System):
-
ament:ROS 2 的元构建系统,支持多种底层构建工具。colcon(collective construction):ROS 2 的推荐构建工具,用于编译和测试工作区中的多个包。它支持ament_cmake(C++),ament_python(Python) 等。
- 命令行接口 (CLI):
ros2命令是与 ROS 2 系统交互的主要入口。
-
ros2 run <pkg_name> <executable_name>:运行节点。ros2 topic list/echo/pub/info/hz: 主题相关的操作。ros2 service list/call/type/info: 服务相关的操作。ros2 action list/send_goal/info: 动作相关的操作。ros2 param list/get/set/describe/dump: 参数相关的操作。ros2 node list/info: 节点相关的操作。ros2 launch <pkg_name> <launch_file_name>: 启动多个节点和配置。
- 启动系统 (Launch System):
-
- ROS 2 的启动系统更加强大和灵活,主要使用 Python 脚本 (
.launch.py) 来描述如何启动和配置一组节点。也支持 XML (.launch.xml) 和 YAML (.launch.yaml) 格式。 - Python launch 文件提供了编程能力,可以实现更复杂的启动逻辑。
- ROS 2 的启动系统更加强大和灵活,主要使用 Python 脚本 (
开发者应根据项目需求、团队经验、预算、以及对实时性、安全性、可扩展性等方面的具体要求,综合评估后做出最合适的选择。随着 ROS 2 生态的不断成熟,其适用范围和竞争力正持续增强。
-
可视化 (RViz2): ROS 2 版本的 3D 可视化工具,用于显示传感器数据(如点云、图像)、机器人模型、TF 变换、导航路径、标记等。
-
仿真 (Gazebo): Gazebo 是一个强大的 3D 机器人仿真器,与 ROS 2 紧密集成(通过
ros_gz包),用于在虚拟环境中测试机器人算法和行为。 -
包 (Packages): ROS 2 代码和资源组织的基本单元,类似于 ROS 1。一个包可以包含源代码、launch 文件、消息/服务/动作定义、配置文件、模型文件等。
五、ROS 1 与 ROS 2 的主要架构区别
|---------------|---------------------------------------|---------------------------------------|
| 特性 | ROS 1 | ROS 2 |
| 主节点 | 需要roscore(单点故障) | 无主节点 (DDS 实现分布式发现) |
| 通信中间件 | 自定义 TCPROS/UDPROS | 基于 DDS 标准 (通过 RMW 抽象层) |
| 实时性 | 有限支持,非设计核心 | 设计上更好地支持实时控制,利用 DDS QoS |
| 安全性 | 较弱,主要依赖网络层安全 | 内建安全机制 (SROS2, 基于 DDS Security) |
| QoS | 基本 (TCP可靠, UDP不可靠),不可配置 | 丰富且可配置的 QoS 策略,继承自 DDS |
| 生命周期管理 | 无标准化节点生命周期管理 | 标准化的节点生命周期管理 (Managed Nodes) |
| 平台支持 | 主要 Linux, 社区支持 macOS, Windows有限 | 官方支持 Linux, macOS, Windows, 积极支持嵌入式系统 |
| 构建系统 | Catkin | Ament + Colcon |
| Python 版本 | Python 2 (部分支持 Python 3) | Python 3 |
| C++ 标准 | C++03 (后有C++11/14支持通过catkin_tools) | C++14/17 及更高版本 (取决于发行版和编译器) |
| 组件化 |nodelet(功能有限,使用较复杂) | 核心概念:组件 (Components),更易用,支持进程内高效通信 |
| 发现机制 | Master-Slave (依赖roscore) | Peer-to-Peer (DDS 动态发现) |
| 许可证 | BSD 为主 | Apache 2.0 为主,更商业友好 |六、总结
ROS 2 并非简单地对 ROS 1 进行升级,而是一次彻底的重新设计。它通过引入 DDS 作为通信核心,并结合现代软件工程实践,成功解决了 ROS 1 在多机器人系统、实时性、安全性和跨平台支持等方面的诸多痛点。其分层架构、标准化的生命周期管理、丰富的 QoS 策略以及内建的安全机制,使得 ROS 2 能够更好地满足现代复杂机器人应用在可靠性、性能和安全性方面的严苛需求。
虽然学习曲线可能比 ROS 1 稍陡峭,但 ROS 2 为机器人开发者提供了一个更强大、更灵活、更面向未来的平台,特别是在工业自动化、自动驾驶、多机器人协作以及商业化产品开发等领域展现出巨大潜力。理解其核心架构和设计理念,对于有效地利用 ROS 2 构建下一代机器人系统至关重要。
七、ROS 2 与其他市场架构对比分析
选择一个合适的软件框架对于机器人项目的成功至关重要。ROS 2 并非孤立存在,市场上还有其他替代方案或相关技术。下面我们将 ROS 2 与几种常见的架构进行对比,以揭示其优缺点。
1. ROS 2 vs. ROS 1
这是最直接的对比,因为 ROS 2 是 ROS 1 的继承者和进化版。
-
ROS 2 的优势:
-
- 去中心化与多机器人支持: ROS 2 基于 DDS,无需
roscore主节点,天然支持多机器人系统的发现和通信,消除了单点故障。 - 实时性: 通过 DDS 的 QoS 策略和 RMW 层的设计,ROS 2 能更好地支持实时控制回路的需求。
- 安全性: 内建的 SROS2 安全机制(基于 DDS Security)提供了身份验证、访问控制和加密,远强于 ROS 1。
- 服务质量 (QoS): 丰富且可配置的 QoS 策略,允许开发者精细控制数据传输的可靠性、持久性等。
- 生命周期管理: 标准化的节点生命周期管理,使系统更健壮、可控。
- 跨平台: 官方支持 Linux, macOS, Windows,并积极支持嵌入式系统 (micro-ROS)。
- 现代语言标准: 支持现代 C++ (C++14/17+) 和 Python 3。
- 组件化: 鼓励使用组件,支持高效的进程内通信。
- 商业友好: Apache 2.0 许可证更易于商业化。
- 去中心化与多机器人支持: ROS 2 基于 DDS,无需
-
ROS 2 的潜在劣势 / ROS 1 的相对优势:
-
- 生态系统成熟度: ROS 1 拥有一个极其庞大且经过长期验证的软件包生态系统。虽然 ROS 2 的生态在快速追赶,但在某些特定领域或针对特定硬件的驱动方面,ROS 1 可能仍有更多现成选择。
- 学习曲线: DDS 的概念(如 QoS、域 ID、RTPS)和 RMW 的抽象层给 ROS 2 带来了一定的学习门槛,尤其对于初学者而言,ROS 1 的概念(如
roscore)可能显得更直接简单。 - 资源消耗: 某些 DDS 实现可能比 ROS 1 的 TCPROS/UDPROS 在非常轻量级的场景下有稍高的基础资源消耗,尽管 micro-ROS 正在解决这个问题。
- 迁移成本: 对于已有的 ROS 1 大型项目,迁移到 ROS 2 需要时间和精力。
2. ROS 2 vs. 专有/自研框架 (Proprietary/In-house Frameworks)
许多公司,特别是大型企业或有特定需求的研究机构,可能会选择自研机器人软件框架。
- ROS 2 的优势:
-
- 开源与社区: 庞大的全球社区支持,丰富的文档、教程和第三方包,降低了开发门槛和成本,避免了供应商锁定。
- 标准化与互操作性: 提供了一套通用的接口和工具,便于不同团队、不同模块之间的集成,也方便集成第三方硬件和软件。基于 DDS 使得与其他 DDS 系统互操作成为可能。
- 丰富工具链: 拥有 RViz2, Gazebo,
ros2CLI,colcon等成熟的开发、调试、仿真和可视化工具。 - 人才储备: 熟悉 ROS 的工程师更容易招聘。
- 快速原型验证: 大量现成功能包可加速原型开发和新功能验证。
- ROS 2 的潜在劣势 / 自研框架的相对优势:
-
- 极致性能与定制化: 自研框架可以针对特定硬件和应用场景进行深度优化,可能在某些极端情况下达到 ROS 2 通用框架难以企及的性能或资源占用率。
- 完全控制: 公司对自研框架拥有完全的控制权,可以根据自身需求快速迭代,不受社区发展方向或开源协议的限制。
- 知识产权: 核心技术和实现细节可以作为商业机密得到保护。
- 针对性简化: 如果应用场景非常简单固定,自研框架可以只实现必要功能,避免 ROS 2 完整框架带来的复杂性。
- 历史包袱: 大型企业可能已经拥有成熟的内部框架,切换成本高。
3. ROS 2 vs. 通用中间件 (如 MQTT, ZeroMQ, gRPC, RabbitMQ)
有些项目可能会考虑使用通用的消息队列或 RPC 框架来构建机器人系统的通信部分。
- ROS 2 的优势:
-
- 机器人领域特化: ROS 2 不仅仅是通信中间件,它是一个完整的机器人应用框架。它提供了 TF (坐标变换)、参数管理、动作库、生命周期管理、标准化的消息类型(如
sensor_msgs,geometry_msgs)等机器人领域的特定抽象和工具。 - 集成生态系统: ROS 2 的工具(如 RViz2, Gazebo)、包管理、构建系统是围绕机器人开发设计的。
- DDS 的强大特性: 相比很多通用中间件,DDS 提供的动态发现、丰富的 QoS、以数据为中心的理念更适合复杂的分布式实时系统。
- 面向复杂系统: ROS 2 (DDS) 的设计更适合节点数量多、数据类型复杂、对实时性和可靠性要求高的场景。
- 机器人领域特化: ROS 2 不仅仅是通信中间件,它是一个完整的机器人应用框架。它提供了 TF (坐标变换)、参数管理、动作库、生命周期管理、标准化的消息类型(如
- ROS 2 的潜在劣势 / 通用中间件的相对优势:
-
- 轻量级与简洁性: 对于非常简单的应用(例如,仅需在几个组件间传递少量简单消息),MQTT 或 ZeroMQ 可能更轻量级,学习和部署更快。
- 特定场景优化:
-
-
- MQTT 非常适合低带宽、高延迟、不可靠的网络环境(常用于物联网)。
- gRPC 在跨语言 RPC 调用方面非常高效,定义接口清晰。
- RabbitMQ 等消息队列在需要复杂路由、持久化、消息确认和事务处理的场景下有优势。
-
-
- 更广泛的 IT 应用: 这些通用中间件在传统 IT 和 Web 领域的应用更为广泛,相关人才和资源可能更多。
- 较低的入门门槛: 单独学习一个通用中间件通常比学习整个 ROS 2 框架要简单。
4. ROS 2 vs. 直接使用 DDS
既然 ROS 2 的核心通信依赖 DDS,为什么不直接使用 DDS 呢?
- ROS 2 的优势:
-
- 更高层抽象:
rclcpp/rclpy等客户端库提供了比原生 DDS API 更易用、更符合机器人开发习惯的接口。 - 机器人领域标准和工具: ROS 2 定义了标准的机器人消息类型、TF 坐标变换系统、参数服务、动作库、生命周期管理等,这些是纯 DDS 不提供的。RViz2、
ros2CLI 等工具也是 ROS 2 生态的一部分。 - 生态系统集成: 大量的 ROS 2 包可以直接使用,无需从头开始为纯 DDS 系统开发所有功能。
- 简化开发: ROS 2 封装了许多 DDS 的复杂配置,提供了合理的默认值,降低了使用 DDS 的门槛。
- RMW 灵活性: 虽然基于 DDS,但 RMW 层的存在理论上允许 ROS 2 未来支持其他类型的中间件。
- 更高层抽象:
- ROS 2 的潜在劣势 / 直接使用 DDS 的相对优势:
-
- 极致控制与性能: 直接使用 DDS API 可以获得对 DDS 所有特性(如自定义传输、特定 QoS 配置的细微调整)的完全控制,可能在某些极端情况下榨取最后一丝性能或实现 ROS 2 RMW 层未暴露的 DDS 功能。
- 无 ROS 依赖: 如果应用场景仅需要 DDS 的数据分发能力,而不需要 ROS 2 的其他任何特性(如 TF、参数、动作、ROS 工具等),那么直接使用 DDS 可以避免引入 ROS 2 的依赖和复杂性。
- 更小代码体积: 对于深度嵌入式且资源极其受限的系统,如果仅需 DDS 的核心通信,直接集成 DDS 库可能比集成 micro-ROS(它本身也包含 RCL/RMW 层)更轻量。
5. ROS 2 vs. PLC 及工业自动化专用平台
在传统的工业自动化领域,PLC (可编程逻辑控制器) 及其配套的 HMI/SCADA 系统占据主导地位。
-
ROS 2 的优势:
-
- 灵活性与复杂算法支持: ROS 2 更适合需要高级感知(如机器视觉、SLAM)、复杂运动规划、机器学习等算法的非结构化环境应用。
- 开源与成本: 通常比专有的 PLC 系统和开发工具成本更低。
- 快速迭代与研究: 非常适合学术研究和快速原型开发。
- 强大的仿真能力: Gazebo 等仿真工具提供了比传统 PLC 仿真更丰富的物理和传感器仿真。
-
ROS 2 的潜在劣势 / PLC 的相对优势:
-
- 确定性与可靠性: PLC 系统专为高可靠性、高确定性的工业控制设计,在恶劣工业环境下的稳定性和实时响应能力久经考验。
- 行业标准与认证: 在许多工业领域,PLC 及其编程语言(如梯形图)是事实标准,并有相应的安全认证。
- 易于维护(对特定人群): 对于熟悉电气和传统自动化控制的工程师,PLC 的编程和维护可能更直观。
- 生态成熟(在工业控制领域): 拥有大量成熟的工业传感器、执行器接口和控制模块。
-
总结:
没有哪个框架是万能的。ROS 2 的核心优势在于其开源性、强大的社区支持、针对机器人领域的丰富功能集、基于 DDS 的现代化通信架构(带来良好的实时性、安全性和多机器人支持潜力)以及跨平台能力。
-
对于复杂的、需要感知与智能决策、多机器人协作、或者希望利用开源生态快速迭代的机器人项目,ROS 2 是一个极具吸引力的选择。
-
对于已有大量 ROS 1 积累且短期内需求稳定的项目,可逐步评估迁移或采用 ROS 1/ROS 2 桥接。
-
对于需求非常简单、对资源占用极其敏感或仅需特定通信模式的组件,轻量级通用中间件可能是补充。
-
对于追求极致性能且有足够研发实力的特定应用,自研框架仍有其价值。
-
对于传统工业产线固定逻辑控制,PLC 依然是主力。