-
场景描述:汽车装配线中,使用EtherNet/IP协议的机器人与使用PROFINET协议的PLC进行数据交互。
-
连接设备:EtherNet/IP机器人控制器(如ABB、FANUC)与PROFINET PLC(如西门子S7-1500)。
-
连接情况:网关实现机器人状态数据与PLC控制指令的转换,确保机器人动作与PLC逻辑协调。

- 网关选型与安装
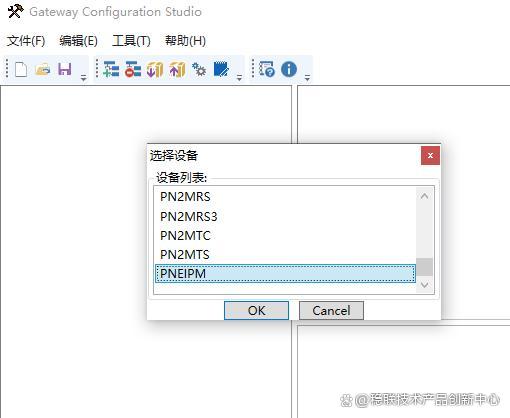
选择支持双向协议转换的工业网关(WL-PN-EIPM),
需同时支持:
-
PROFINET IO设备功能(PLC侧)
-
EtherNet/IP适配器模式(机器人侧)

物理安装时注意:
-
PROFINET接口通过RJ45连接至PLC交换机
-
EtherNet/IP接口直连机器人控制器
-
为网关分配独立IP段(如192.168.1.100)

- PROFINET侧配置
在STEP7/TIA Portal中:
-
导入网关GSDML文件
-
添加为IO设备,分配设备名称(如PN_ABB_GW)
-
配置输入/输出数据域(建议32字节输入+32字节输出)
- EtherNet/IP侧配置
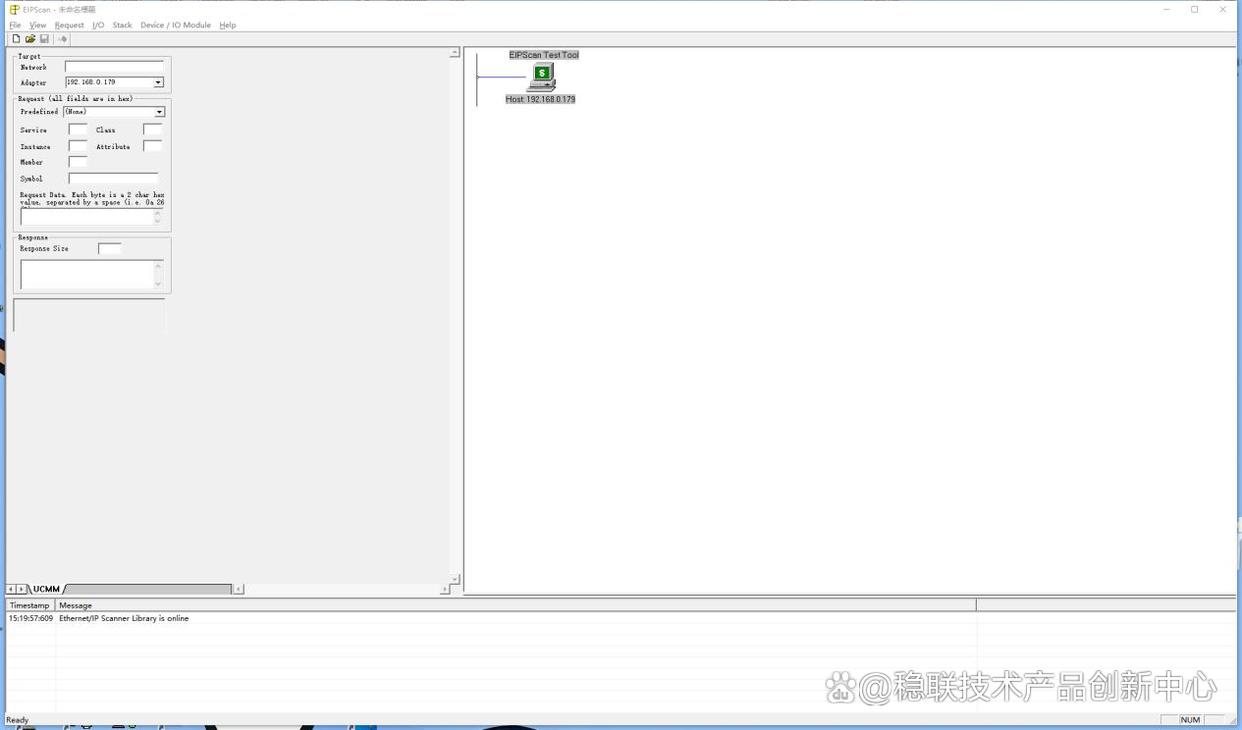
在机器人编程软件(如RobotStudio):
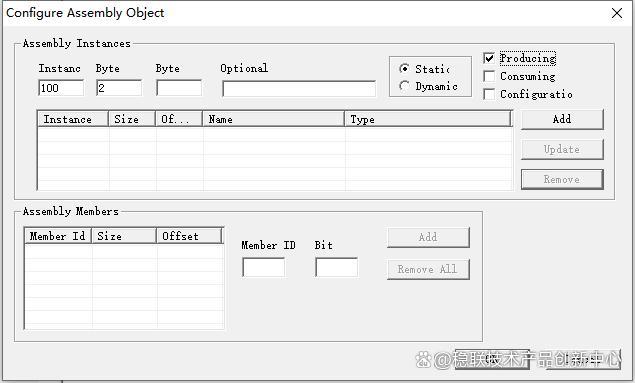
- 添加网关为EtherNet/IP适配器
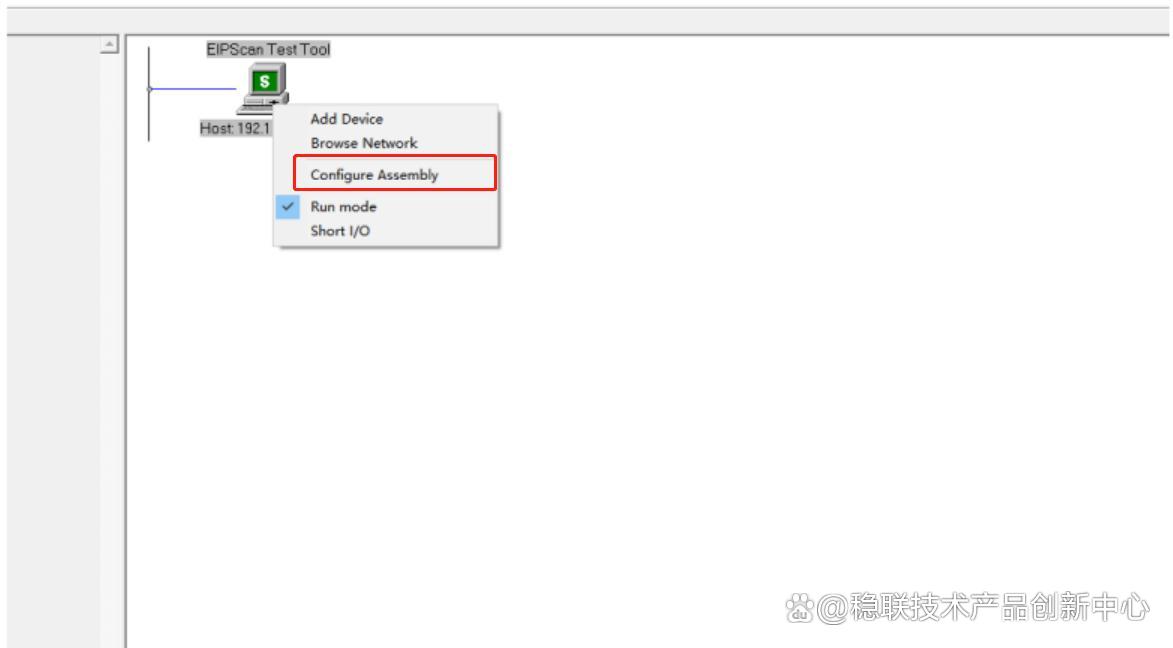
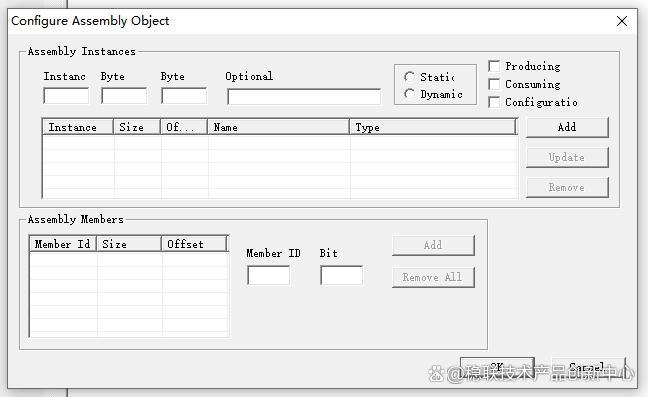
- 配置Assembly对象:
-
输入数据映射PLC输出区
-
输出数据映射PLC输入区
- 设置RPI(请求数据间隔)与PLC扫描周期匹配
- 数据映射示例
| PLC侧(PROFINET) | 网关地址 | 机器人侧(EIP) |
|-------------------|----------|-----------------|
| QB0-QB3 | 0x1000 | Input_Assembly |
| IB0-IB3 | 0x2000 | Output_Assembly |
- 调试要点
-
使用Wireshark抓包验证协议帧
-
先测试单向通信(如PLC→机器人)
-
检查信号延迟(要求<1个控制周期)

(注:具体参数需根据机器人型号和PLC程序调整,建议保留10%-20%的通信余量)