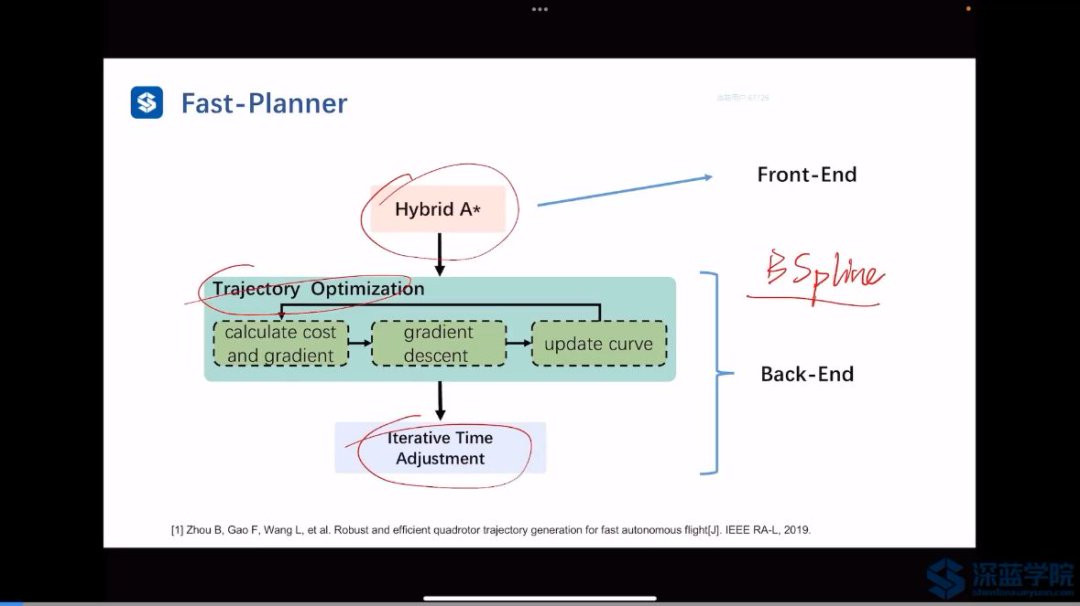
轨迹优化和时间重分配:
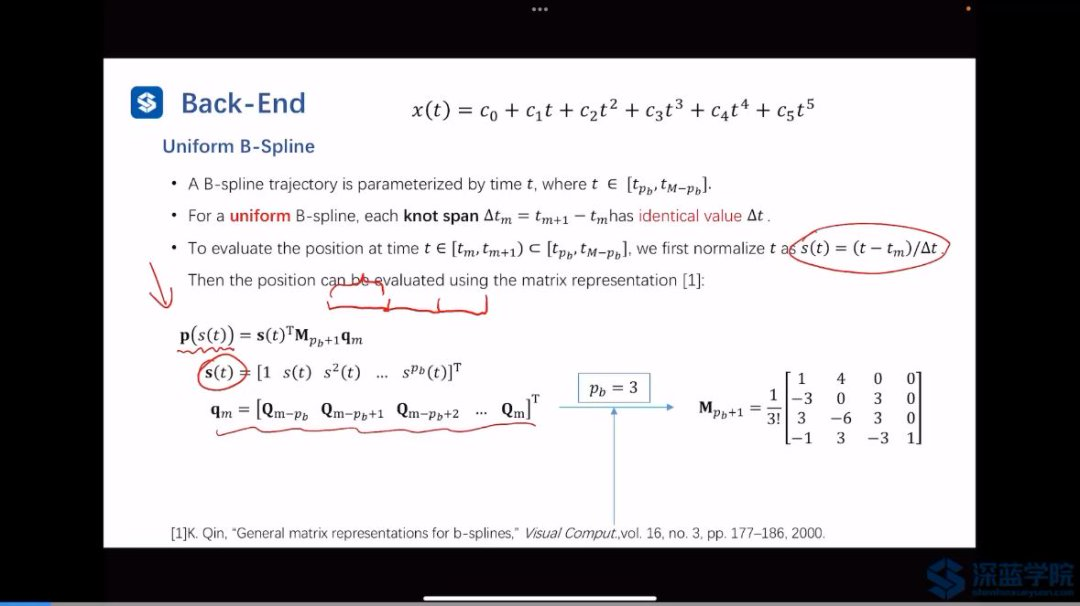
3阶均匀B-Spline:
通过设计优化问题进行B-Spline的轨迹优化生成: 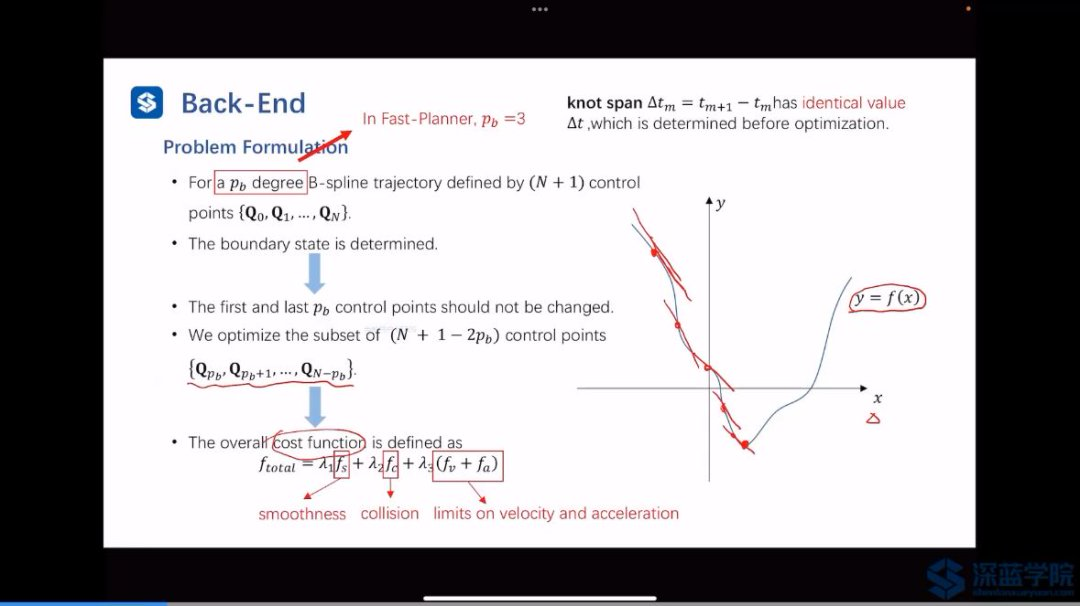
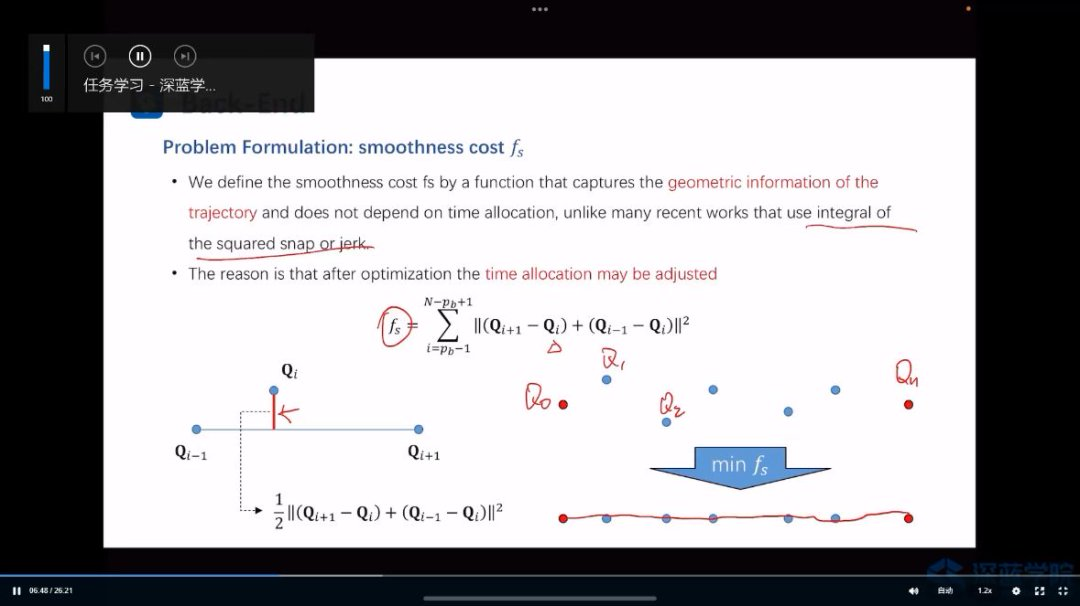
代价1:平滑,中间点到起点和终点之间的距离最小:
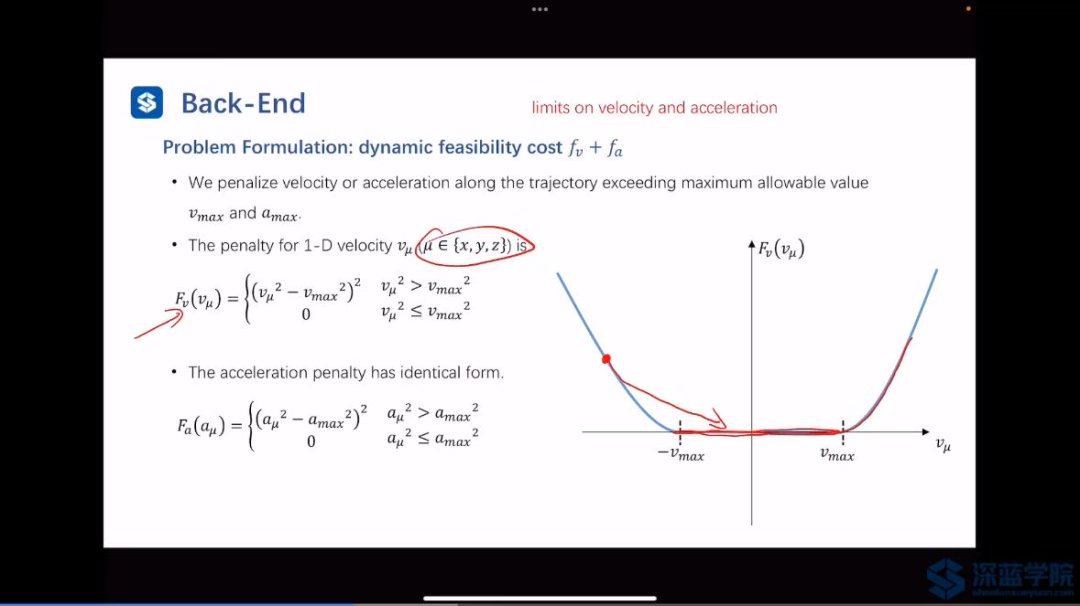
速度和加速度有边界代价约束:
连续曲线上的约束,转换为控制点上面的约束,凸包性质: 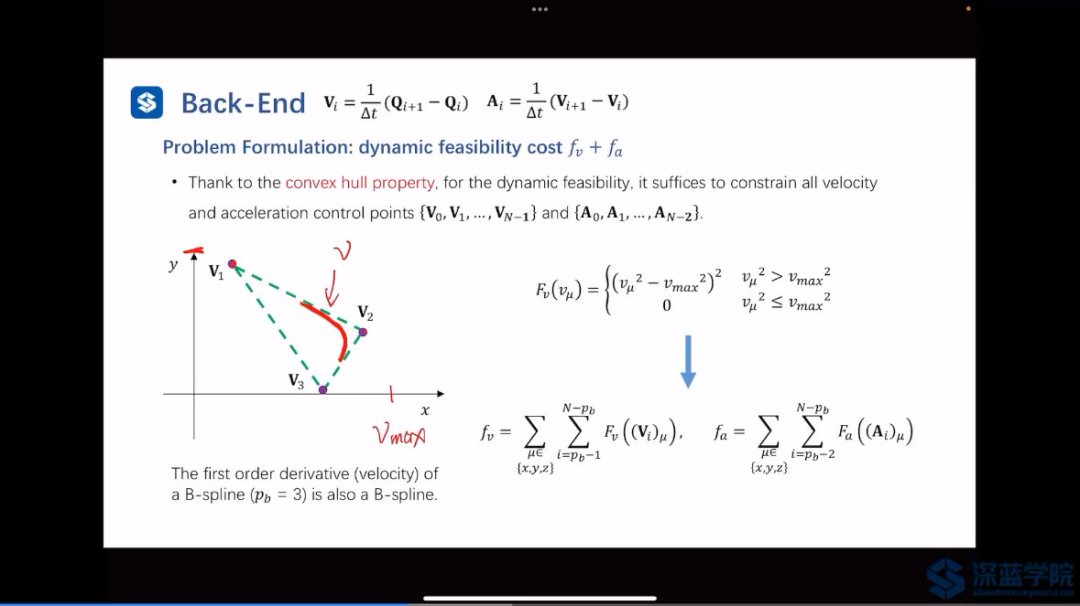
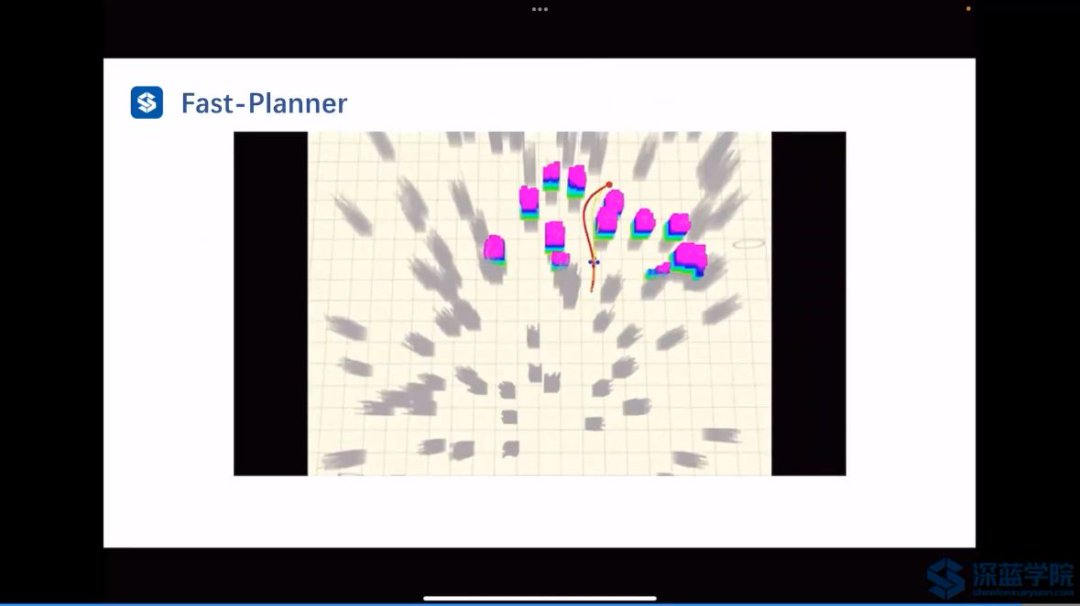
避障的代价:离最近障碍物的距离
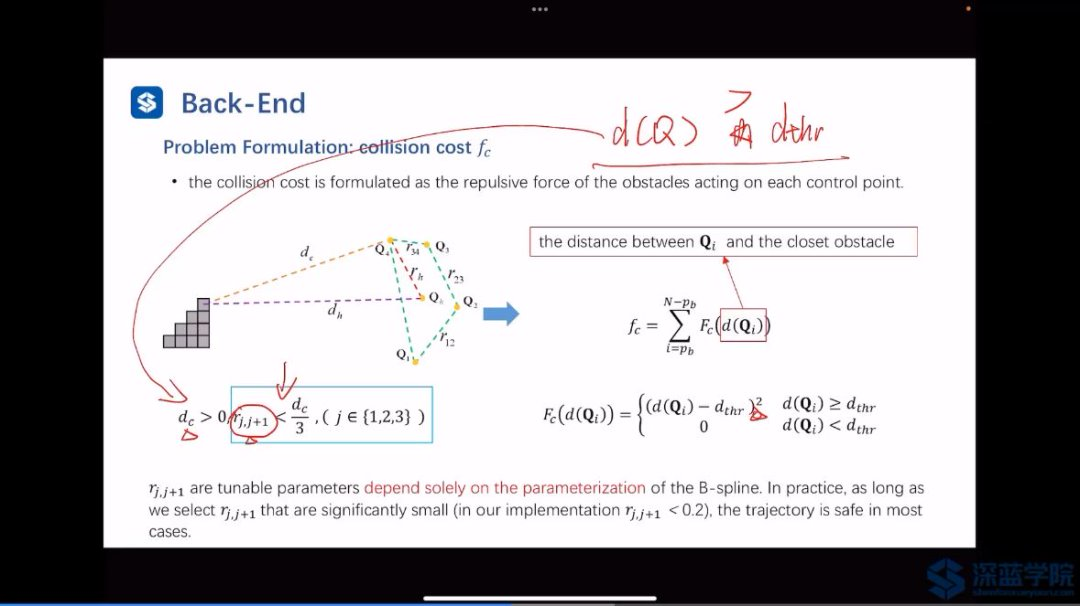
通过ESDF地图获取离障碍物的最近距离:
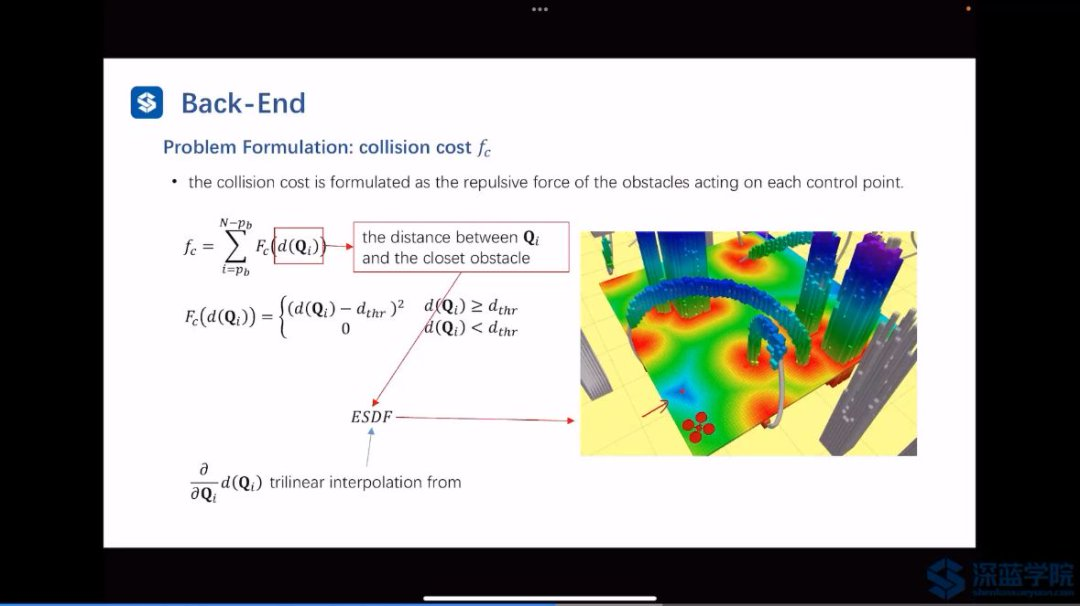
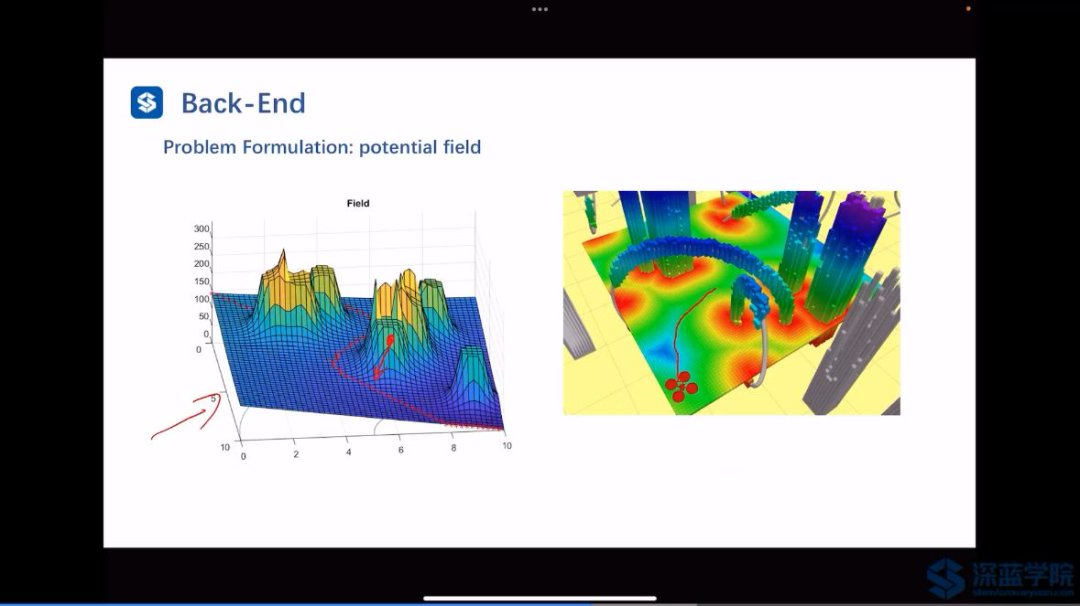
ESDF地图的理解:
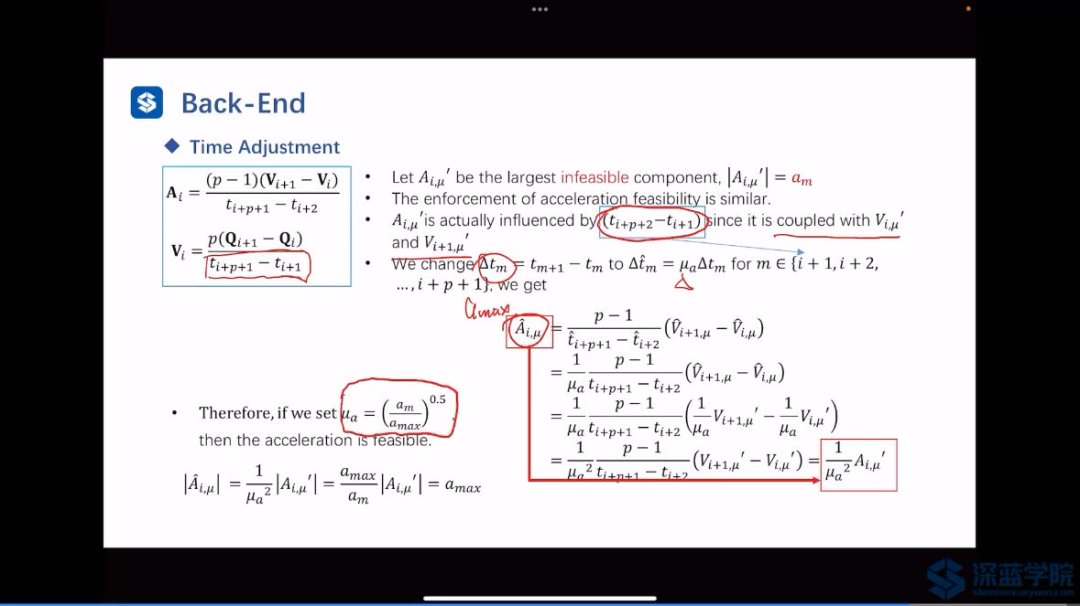
在障碍物较多时,控制点之间的时间太小,导致生成的轨迹超出了动力学约束:
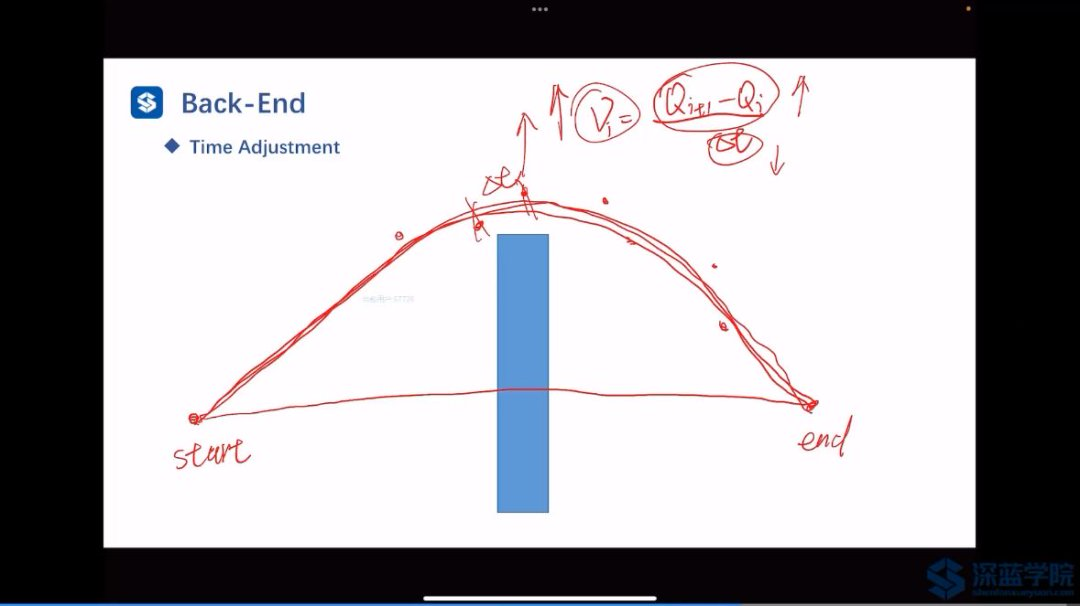
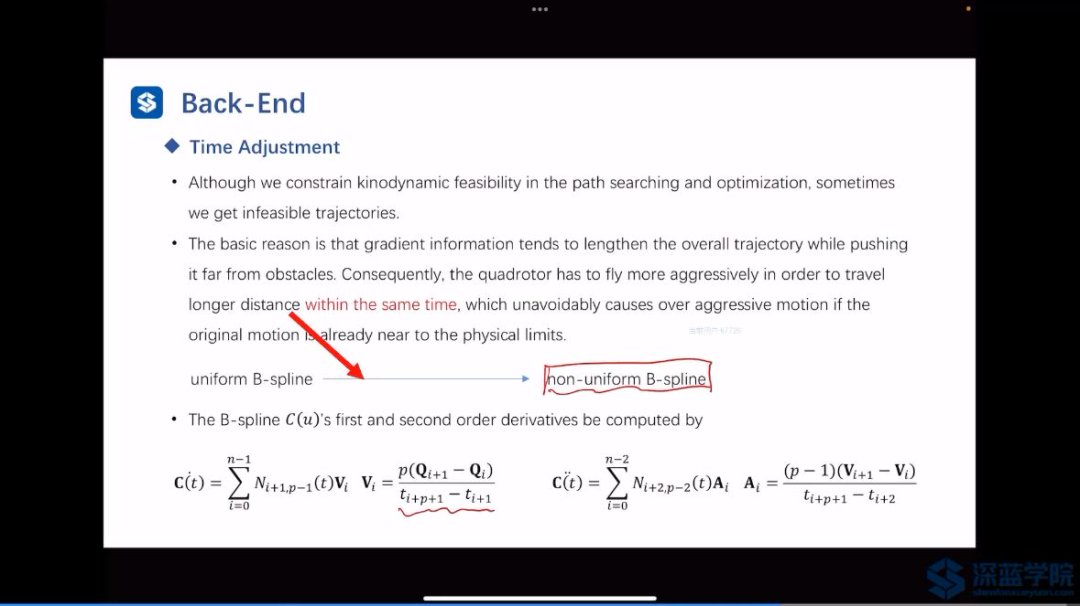
计算需要调整的控制点的速度大小,增加时间:
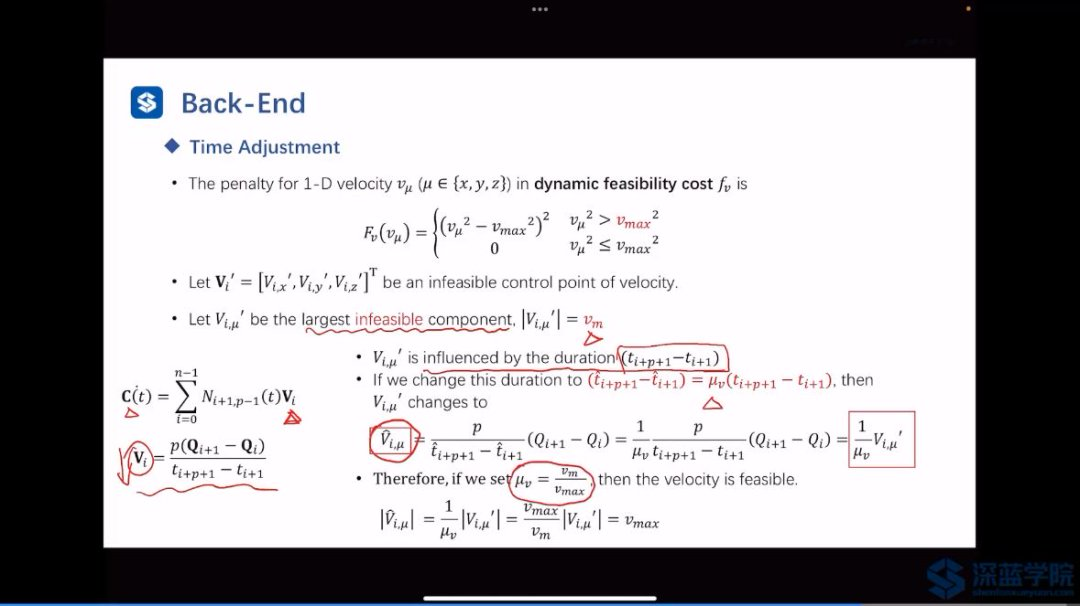
对加速度采取相同的策略使得其不至于太大: