此文章,涉及到专业性比较强,所以,大部分的内容,基本上都是示例代码的形式出现。以下的技术路径,完全经过实践验证,并且效果很好,可以放心使用。
1 概述
在医学影像中,对DICOM的渲染,通常采用Phong 冯氏光照模型来实现。具体细节可以参考我写的这篇文章
https://blog.csdn.net/rendaweibuaa/article/details/128910050?spm=1001.2014.3001.5501
这里只对一些VR渲染中,关键参数这里做一些补充。
1.1 渲染物体梯度计算 (N计算)
为了使沿着光线的方向显示的更平滑一下,梯度计算可以仿照滤波因子写一个梯度计算的方式;
1.2 阴影效果
为了显示效果更加逼真,近的物体更亮,远的物体更暗,这里采用距离的倒数作为亮度的权重。
上图明显可以看出来,近处亮远处暗的效果;
1.3 材质
因为DICOM中,没有材质属性,但是实际的渲染过程中,可以根据渲染骨,软组织来调整漫反射和镜面反射的参数。
2 STL格式的渲染
在工程中,通常有需要将STL格式和VR一起进行渲染的需求。例如假体的植入,例如牙科,关节置换等。STL格式这里就不具体展开介绍了。以下代码是,三角面片追踪渲染的代码;我把主要的注释都写在代码中。
cpp
/**
三角面片追踪渲染函数
输入是一个当前渲染前的rgba 的值
当前三角面的col
光线和三角片的交点 interactPoint
三角面片 trifaceV1 trifaceV2 trifaceV3
光线方向 dirLight
*/
__device__ float4 __trifaceTracing(
float4 sum, //累计颜色
float4 col, // 颜色和透明度
float alphaAccObject,
float3 interactPoint, // 位置
float3 trifaceV1, // 三角面第一个顶点
float3 trifaceV2, // 三角面第二个顶点
float3 trifaceV3, // 三角面第三个顶点
float3 dirLight, // 光线方向
bool invertZ,
float distanceInterAndO, // 交点与源点距离
float vrBrightness // 亮暗的权值
)
{
float3 v1 = trifaceV2 - trifaceV1;
float3 v2 = trifaceV3 - trifaceV2;
float3 N = cross(v1, v2); // 法向量
N = normalize(N);
float diffuse = dot(N, dirLight);
if (diffuse < 0)// 如果是表面渲染,光照在背面,不应该再有反射;但是对于当前的透视来说,直接N反过来;
{
diffuse = -1 * diffuse;
}
diffuse = diffuse < 5e-7f ? 1e-6f : diffuse;
// Ka + Kd + Ks ≤ 1 这样可以避免光照过曝。不过,具体的比值可能因不同的材质和光照需求而有所不同
float dr = distanceInterAndO + RAY_SOURCE_OFFSET; // RAY_SOURCE_OFFSET 用来调整距离,从而调整阴影效果
float dr2 = pow(dr ,2);
float invDr2 = 1.0f / dr2;
float4 clrLight = col * 0.1f;
// 以上已经将此点的Phong都计算出来
float4 f4Temp = make_float4(0.0f);
f4Temp = col * ( ((diffuse * 0.65f + 0.15f * (pow(diffuse, 64.0f))) * vrBrightness) * invDr2 );
clrLight += f4Temp;
float alphaWeightLeft = (1.0f - alphaAccObject) * col.w; // 给后续光线上的点,留下来的多少透明度(1.0f - alphaAccObject) 和 当前本身当前点的权值 乘
return (sum + alphaWeightLeft * clrLight);
}下面的代码是用来判断光线和三角面片是否相交
cpp
__device__ __forceinline__ bool rayIntersectTriangle(
const float3& orig, const float3& dir,
float3 v0, float3 v1, float3 v2, // 三角形的三个顶点
float* t, float* u, float* v,
float3* intersection)
{
// 初始计算edge1和edge2
float3 edge1 = make_float3(v1.x - v0.x, v1.y - v0.y, v1.z - v0.z);
float3 edge2 = make_float3(v2.x - v0.x, v2.y - v0.y, v2.z - v0.z);
// 计算pvec = dir × edge2
float pvec_x = dir.y * edge2.z - dir.z * edge2.y;
float pvec_y = dir.z * edge2.x - dir.x * edge2.z;
float pvec_z = dir.x * edge2.y - dir.y * edge2.x;
// 计算行列式det = edge1 · pvec
float det = edge1.x * pvec_x + edge1.y * pvec_y + edge1.z * pvec_z;
// 处理det为负的情况:交换v1和v2,反转法向量方向
if (det < 0.0f) {
// 交换v1和v2
float3 temp = v1;
v1 = v2;
v2 = temp;
// 重新计算edge1和edge2
edge1 = make_float3(v1.x - v0.x, v1.y - v0.y, v1.z - v0.z);
edge2 = make_float3(v2.x - v0.x, v2.y - v0.y, v2.z - v0.z);
// 重新计算pvec和det
pvec_x = dir.y * edge2.z - dir.z * edge2.y;
pvec_y = dir.z * edge2.x - dir.x * edge2.z;
pvec_z = dir.x * edge2.y - dir.y * edge2.x;
det = edge1.x * pvec_x + edge1.y * pvec_y + edge1.z * pvec_z;
}
// 检查行列式是否接近零(考虑绝对值)
if (fabsf(det) < 5e-7f)
{
return false;
}
// 计算inv_det并继续后续步骤
float inv_det = 1.0f / det;
float3 tvec = make_float3(orig.x - v0.x, orig.y - v0.y, orig.z - v0.z);
// 计算u并检查范围
float local_u = (tvec.x * pvec_x + tvec.y * pvec_y + tvec.z * pvec_z) * inv_det;
if (local_u < 0.0f || local_u > 1.0f) return false;
// 计算qvec = tvec × edge1
float qvec_x = tvec.y * edge1.z - tvec.z * edge1.y;
float qvec_y = tvec.z * edge1.x - tvec.x * edge1.z;
float qvec_z = tvec.x * edge1.y - tvec.y * edge1.x;
// 计算v并检查范围
float local_v = (dir.x * qvec_x + dir.y * qvec_y + dir.z * qvec_z) * inv_det;
if (local_v < 0.0f || (local_u + local_v) > 1.0f) return false;
// 计算t并检查正值
float local_t = (edge2.x * qvec_x + edge2.y * qvec_y + edge2.z * qvec_z) * inv_det;
if (local_t < 0.0f) return false;
// 写入结果
*t = local_t;
*u = local_u;
*v = local_v;
// 计算交点坐标
if (intersection) {
intersection->x = orig.x + local_t * dir.x;
intersection->y = orig.y + local_t * dir.y;
intersection->z = orig.z + local_t * dir.z;
}
return true;
}3 加速渲染(BVH树)
通过以上代码计算后,确实可以将三角面片和VR数据一次渲染出来。但是,当三角面片一多的时候,就会发现,渲染速度会变的非常慢。
此时,我们可以通过创建Bvh树来加速渲染。
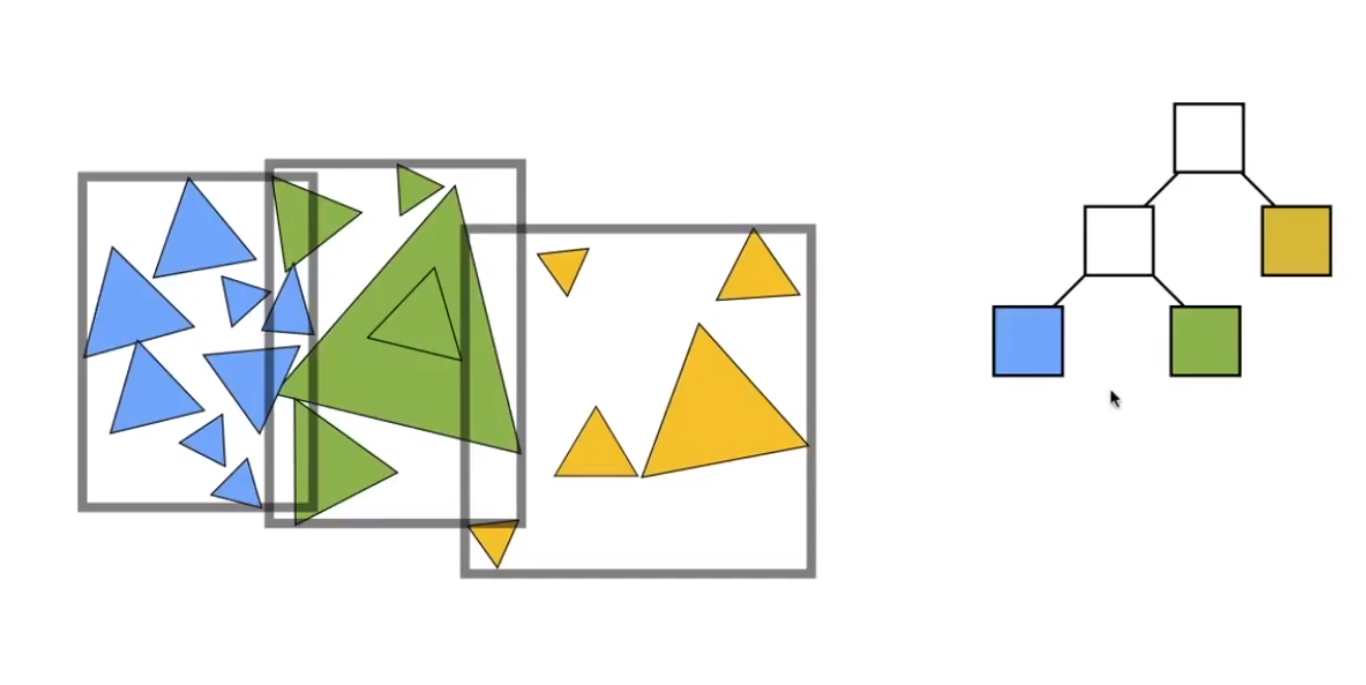
原理可以参考https://blog.csdn.net/VIPCCJ/article/details/119550359,完全将时间复杂度从O(n)降低到O(logn)。
以下是创建BVH树的代码
cpp
// 计算包围盒
void BvhMethods::BvhCalculateBounds(const Facet3D* facets, int start, int end, float bounds[6]) {
for (int i = 0; i < 6; ++i)
{
if (i % 2 == 0)
bounds[i] = FLT_MAX;
else
bounds[i] = -FLT_MAX;
}
for (int i = start; i < end; ++i)
{
const float* box = facets[i].boxes;
for (int j = 0; j < 6; ++j)
{
if (j % 2 == 0)
{
if (box[j] < bounds[j])
bounds[j] = box[j];
}
else
{
if (box[j] > bounds[j])
bounds[j] = box[j];
}
}
}
}
// 合并两个包围盒
void BvhMethods::BvhMergeBounds(const float a[6], const float b[6], float out[6])
{
for (int i = 0; i < 6; ++i)
{
out[i] = (i % 2 == 0) ? fminf(a[i], b[i]) : fmaxf(a[i], b[i]);
}
}
// 构建BVH
int BvhMethods::BvhBuildBVH(const std::vector<Facet3D>& facets, std::vector<BvhNode>& nodes, int start, int end) {
int nodeIndex = nodes.size();
nodes.push_back(BvhNode());
// 计算当前节点的包围盒
BvhCalculateBounds(&facets[0], start, end, nodes[nodeIndex].bounds);
// 如果只有一个三角形,创建叶节点
if (end - start == 1) {
nodes[nodeIndex].left = -1;
nodes[nodeIndex].right = -1;
nodes[nodeIndex].start = start;
nodes[nodeIndex].count = 1;
return nodeIndex;
}
// 找到最佳分割轴
float axisExtents[3];
for (int axis = 0; axis < 3; ++axis) {
float minVal = facets[start].boxes[axis];
float maxVal = minVal;
for (int i = start + 1; i < end; ++i) {
minVal = fminf(minVal, facets[i].boxes[axis]);
maxVal = fmaxf(maxVal, facets[i].boxes[axis]);
}
axisExtents[axis] = maxVal - minVal;
}
int splitAxis = 0;
if (axisExtents[1] > axisExtents[splitAxis]) splitAxis = 1;
if (axisExtents[2] > axisExtents[splitAxis]) splitAxis = 2;
// 按分割轴排序三角形
std::vector<int> indices(end - start);
for (int i = 0; i < end - start; ++i) indices[i] = start + i;
std::sort(indices.begin(), indices.end(), [splitAxis, &facets](int a, int b) {
return facets[a].boxes[splitAxis] < facets[b].boxes[splitAxis];
});
// 找到中间点
int middle = (start + end) * 0.5f;
int split = middle;
// 构建子节点
int leftIndex = BvhBuildBVH(facets, nodes, start, middle);
int rightIndex = BvhBuildBVH(facets, nodes, middle, end);
nodes[nodeIndex].left = leftIndex;
nodes[nodeIndex].right = rightIndex;
nodes[nodeIndex].start = -1;
nodes[nodeIndex].count = -1;
return nodeIndex;
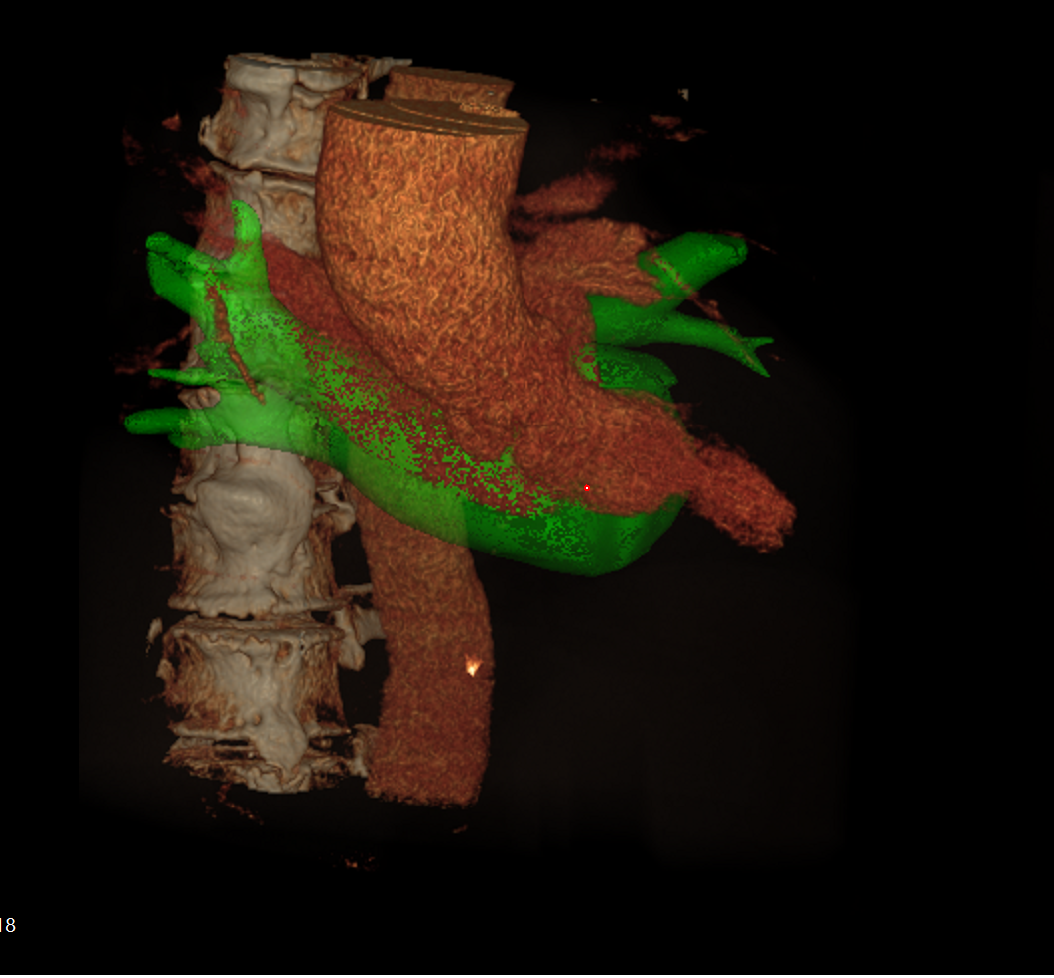
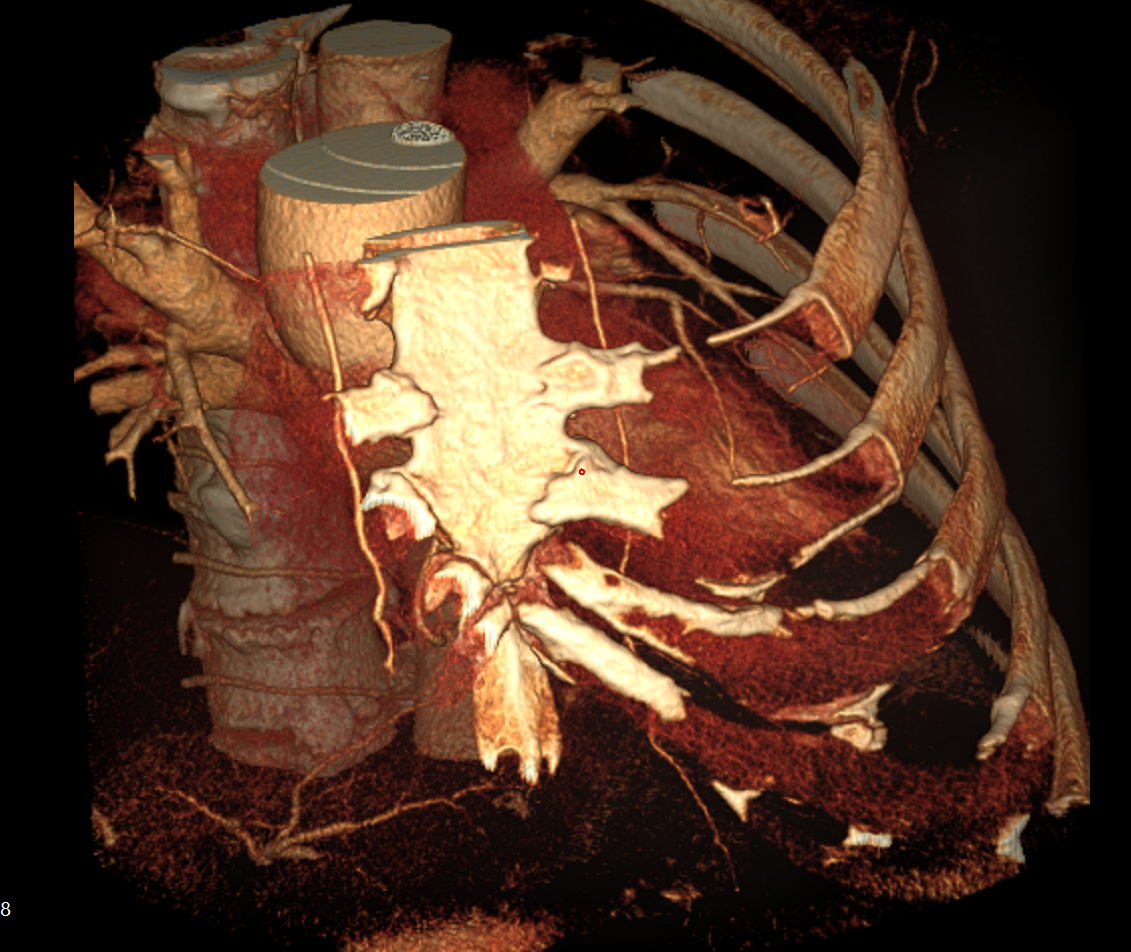
}4 实验
下图是一个由59350个三角面片表示的左心室stl和整个心脏的DICOM点云数据,放在一起进行混合渲染效果图,笔记本上的显卡是RTX3050,整个程序跑起来很顺滑,完全没有任何问题。