前言
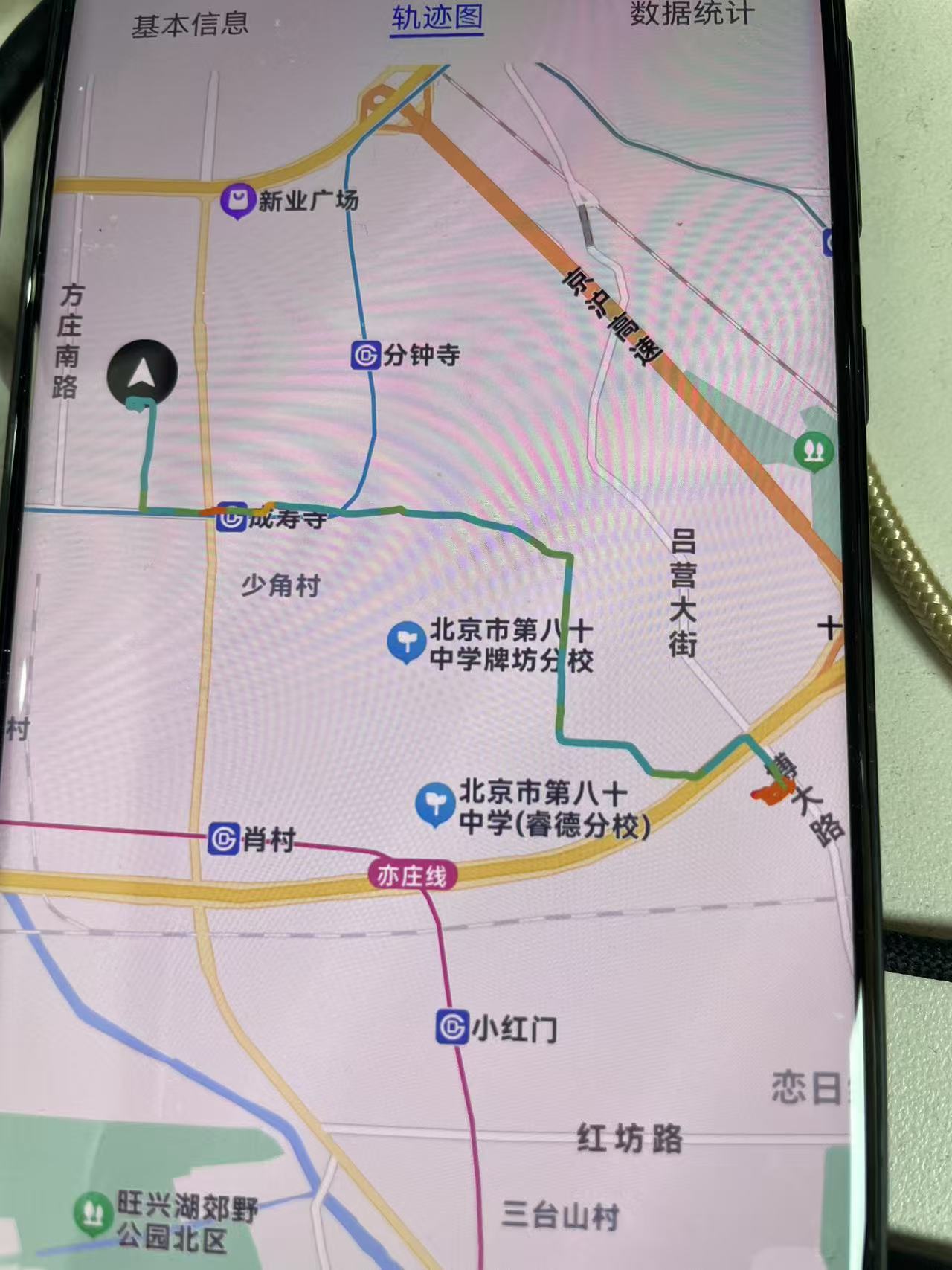
在户外运动应用中,绘制运动速度轨迹不仅可以直观地展示用户的运动路线,还能通过颜色变化反映速度的变化,帮助用户更好地了解自己的运动状态。然而,如何在鸿蒙系统中实现这一功能呢?本文将结合实际开发经验,深入解析从数据处理到地图绘制的全过程,带你一步步掌握如何绘制运动速度轨迹。
一、核心工具:轨迹颜色与优化
绘制运动速度轨迹的关键在于两个工具类:PathGradientTool和PathSmoothTool。这两个工具类分别用于处理轨迹的颜色和优化轨迹的平滑度。
1.轨迹颜色工具类:PathGradientTool
PathGradientTool的作用是根据运动速度为轨迹点分配颜色。速度越快,颜色越接近青色;速度越慢,颜色越接近红色。以下是PathGradientTool的核心逻辑:
typescript
export class PathGradientTool {
/**
* 获取路径染色数组
* @param points 路径点数据
* @param colorInterval 取色间隔,单位m,范围20-2000,多长距离设置一次颜色
* @returns 路径染色数组
*/
static getPathColors(points: RunPoint[], colorInterval: number): string[] | null {
if (!points || points.length < 2) {
return null;
}
let interval = Math.max(20, Math.min(2000, colorInterval));
const pointsSize = points.length;
const speedList: number[] = [];
const colorList: string[] = [];
let index = 0;
let lastDistance = 0;
let lastTime = 0;
let maxSpeed = 0;
let minSpeed = 0;
// 第一遍遍历:收集速度数据
points.forEach(point => {
index++;
if (point.totalDistance - lastDistance > interval) {
let currentSpeed = 0;
if (point.netDuration - lastTime > 0) {
currentSpeed = (point.netDistance - lastDistance) / (point.netDuration - lastTime);
}
maxSpeed = Math.max(maxSpeed, currentSpeed);
minSpeed = minSpeed === 0 ? currentSpeed : Math.min(minSpeed, currentSpeed);
lastDistance = point.netDistance;
lastTime = point.netDuration;
// 为每个间隔内的点添加相同的速度
for (let i = 0; i < index; i++) {
speedList.push(currentSpeed);
}
// 添加屏障
speedList.push(Number.MAX_VALUE);
index = 0;
}
});
// 处理剩余点
if (index > 0) {
const lastPoint = points[points.length - 1];
let currentSpeed = 0;
if (lastPoint.netDuration - lastTime > 0) {
currentSpeed = (lastPoint.netDistance - lastDistance) / (lastPoint.netDuration - lastTime);
}
for (let i = 0; i < index; i++) {
speedList.push(currentSpeed);
}
}
// 确保速度列表长度与点数一致
if (speedList.length !== points.length) {
// 调整速度列表长度
if (speedList.length > points.length) {
speedList.length = points.length;
} else {
const lastSpeed = speedList.length > 0 ? speedList[speedList.length - 1] : 0;
while (speedList.length < points.length) {
speedList.push(lastSpeed);
}
}
}
// 生成颜色列表
let lastColor = '';
let hasBarrier = false;
for (let i = 0; i < speedList.length; i++) {
const speed = speedList[i];
if (speed === Number.MAX_VALUE) {
hasBarrier = true;
continue;
}
const color = PathGradientTool.getAgrSpeedColorHashMap(speed, maxSpeed, minSpeed);
if (hasBarrier) {
hasBarrier = false;
if (color.toUpperCase() === lastColor.toUpperCase()) {
colorList.push(PathGradientTool.getBarrierColor(color));
continue;
}
}
colorList.push(color);
lastColor = color;
}
// 确保颜色列表长度与点数一致
if (colorList.length !== points.length) {
if (colorList.length > points.length) {
colorList.length = points.length;
} else {
const lastColor = colorList.length > 0 ? colorList[colorList.length - 1] : '#FF3032';
while (colorList.length < points.length) {
colorList.push(lastColor);
}
}
}
return colorList;
}
/**
* 根据速度定义不同的颜色区间来绘制轨迹
* @param speed 速度
* @param maxSpeed 最大速度
* @param minSpeed 最小速度
* @returns 颜色值
*/
private static getAgrSpeedColorHashMap(speed: number, maxSpeed: number, minSpeed: number): string {
const range = maxSpeed - minSpeed;
if (speed <= minSpeed + range * 0.2) { // 0-20%区间配速
return '#FF3032';
} else if (speed <= minSpeed + range * 0.4) { // 20%-40%区间配速
return '#FA7B22';
} else if (speed <= minSpeed + range * 0.6) { // 40%-60%区间配速
return '#F5BE14';
} else if (speed <= minSpeed + range * 0.8) { // 60%-80%区间配速
return '#7AC36C';
} else { // 80%-100%区间配速
return '#00C8C3';
}
}
}2.轨迹优化工具类:PathSmoothTool
PathSmoothTool的作用是优化轨迹的平滑度,减少轨迹点的噪声和冗余。以下是PathSmoothTool的核心逻辑:
typescript
export class PathSmoothTool {
private mIntensity: number = 3;
private mThreshhold: number = 0.01;
private mNoiseThreshhold: number = 10;
/**
* 轨迹平滑优化
* @param originlist 原始轨迹list,list.size大于2
* @returns 优化后轨迹list
*/
pathOptimize(originlist: RunLatLng[]): RunLatLng[] {
const list = this.removeNoisePoint(originlist); // 去噪
const afterList = this.kalmanFilterPath(list, this.mIntensity); // 滤波
const pathoptimizeList = this.reducerVerticalThreshold(afterList, this.mThreshhold); // 抽稀
return pathoptimizeList;
}
/**
* 轨迹线路滤波
* @param originlist 原始轨迹list,list.size大于2
* @returns 滤波处理后的轨迹list
*/
kalmanFilterPath(originlist: RunLatLng[], intensity: number = this.mIntensity): RunLatLng[] {
const kalmanFilterList: RunLatLng[] = [];
if (!originlist || originlist.length <= 2) return kalmanFilterList;
this.initial(); // 初始化滤波参数
let lastLoc = originlist[0];
kalmanFilterList.push(lastLoc);
for (let i = 1; i < originlist.length; i++) {
const curLoc = originlist[i];
const latLng = this.kalmanFilterPoint(lastLoc, curLoc, intensity);
if (latLng) {
kalmanFilterList.push(latLng);
lastLoc = latLng;
}
}
return kalmanFilterList;
}
/**
* 单点滤波
* @param lastLoc 上次定位点坐标
* @param curLoc 本次定位点坐标
* @returns 滤波后本次定位点坐标值
*/
kalmanFilterPoint(lastLoc: RunLatLng, curLoc: RunLatLng, intensity: number = this.mIntensity): RunLatLng | null {
if (this.pdelt_x === 0 || this.pdelt_y === 0) {
this.initial();
}
if (!lastLoc || !curLoc) return null;
intensity = Math.max(1, Math.min(5, intensity));
let filteredLoc = curLoc;
for (let j = 0; j < intensity; j++) {
filteredLoc = this.kalmanFilter(lastLoc.longitude, filteredLoc.longitude, lastLoc.latitude, filteredLoc.latitude);
}
return filteredLoc;
}
轨迹抽稀
• @param inPoints 待抽稀的轨迹list
• @param threshHold 阈值
• @returns 抽稀后的轨迹list
/
private reducerVerticalThreshold(inPoints:RunLatLng[],threshHold:number):RunLatLng[]{
if(!inPoints||inPoints.length<=2)return inPoints||[];
const ret: RunLatLng[] = [];
for (let i = 0; i < inPoints.length; i++) {
const pre = this.getLastLocation(ret);
const cur = inPoints[i];
if (!pre || i === inPoints.length - 1) {
ret.push(cur);
continue;
}
const next = inPoints[i + 1];
const distance = this.calculateDistanceFromPoint(cur, pre, next);
if (distance > threshHold) {
ret.push(cur);
}
}
return ret;
}
/
• 轨迹去噪
• @param inPoints 原始轨迹list
• @returns 去噪后的轨迹list
/
removeNoisePoint(inPoints:RunLatLng[]):RunLatLng[]{
if(!inPoints||inPoints.length<=2)return inPoints||[];
const ret: RunLatLng[] = [];
for (let i = 0; i < inPoints.length; i++) {
const pre = this.getLastLocation(ret);
const cur = inPoints[i];
if (!pre || i === inPoints.length - 1) {
ret.push(cur);
continue;
}
const next = inPoints[i + 1];
const distance = this.calculateDistanceFromPoint(cur, pre, next);
if (distance < this.mNoiseThreshhold) {
ret.push(cur);
}
}
return ret;
}
/
• 获取最后一个位置点
/
private getLastLocation(points:RunLatLng[]):RunLatLng|null{
if(!points||points.length===0)return null;
return points[points.length-1];
}
/
• 计算点到线的垂直距离
/
private calculateDistanceFromPoint(p:RunLatLng,lineBegin:RunLatLng,lineEnd:RunLatLng):number{
const A=p.longitude-lineBegin.longitude;
const B=p.latitude-lineBegin.latitude;
const C=lineEnd.longitude-lineBegin.longitude;
const D=lineEnd.latitude-lineBegin.latitude;
const dot=A * C+B * D;
const len_sq=C * C+D * D;
const param=dot/len_sq;
let xx: number, yy: number;
if (param < 0 || (lineBegin.longitude === lineEnd.longitude && lineBegin.latitude === lineEnd.latitude)) {
xx = lineBegin.longitude;
yy = lineBegin.latitude;
} else if (param > 1) {
xx = lineEnd.longitude;
yy = lineEnd.latitude;
} else {
xx = lineBegin.longitude + param * C;
yy = lineBegin.latitude + param * D;
}
const point = new RunLatLng(yy, xx);
return this.calculateLineDistance(p, point);
}
/
• 计算两点之间的距离
/
private calculateLineDistance(point1:RunLatLng,point2:RunLatLng):number{
const EARTH_RADIUS=6378137.0;
const lat1=this.rad(point1.latitude);
const lat2=this.rad(point2.latitude);
const a=lat1-lat2;
const b=this.rad(point1.longitude)-this.rad(point2.longitude);
const s=2 * Math.asin(Math.sqrt(Math.pow(Math.sin(a/2),2)+
Math.cos(lat1) * Math.cos(lat2) * Math.pow(Math.sin(b/2),2)));
return s * EARTH_RADIUS;
}
/
• 角度转弧度
/
private rad(d:number):number{
return d * Math.PI/180.0;
}
/
• 轨迹抽稀(同时处理源数据)
• @param inPoints 待抽稀的轨迹list
• @param sourcePoints 源数据list,与inPoints一一对应
• @param threshHold 阈值
• @returns 包含抽稀后的轨迹list和对应的源数据list
/
reducerVerticalThresholdWithSource(inPoints:RunLatLng[],sourcePoints:T[],threshHold:number=this.mThreshhold):PointSource{
if(!inPoints||!sourcePoints||inPoints.length<=2||inPoints.length!==sourcePoints.length){
return{points:inPoints||[],sources:sourcePoints||[]};
}
const retPoints: RunLatLng[] = [];
const retSources: T[] = [];
for (let i = 0; i < inPoints.length; i++) {
const pre = this.getLastLocation(retPoints);
const cur = inPoints[i];
if (!pre || i === inPoints.length - 1) {
retPoints.push(cur);
retSources.push(sourcePoints[i]);
continue;
}
const next = inPoints[i + 1];
const distance = this.calculateDistanceFromPoint(cur, pre, next);
if (distance > threshHold) {
retPoints.push(cur);
retSources.push(sourcePoints[i]);
}
}
return { points: retPoints, sources: retSources };
}
}二、绘制运动速度轨迹
有了上述两个工具类后,我们就可以开始绘制运动速度轨迹了。以下是绘制轨迹的完整流程:
1.准备轨迹点数据
首先,将原始轨迹点数据转换为RunLatLng数组,以便后续处理:
typescript
// 将轨迹点转换为 RunLatLng 数组进行优化
let tempTrackPoints = this.record!.points.map(point => new RunLatLng(point.latitude, point.longitude));2.优化轨迹点
使用PathSmoothTool对轨迹点进行优化,包括去噪、滤波和抽稀,为保证源数据正确,我这里只做了抽稀:
typescript
// 轨迹优化
const pathSmoothTool = new PathSmoothTool();
const optimizedPoints = pathSmoothTool.reducerVerticalThresholdWithSource<RunPoint>(tempTrackPoints, this.record!.points);3.转换为地图显示格式
将优化后的轨迹点转换为地图所需的LatLng格式:
typescript
// 将优化后的点转换为 LatLng 数组用于地图显示
this.trackPoints = optimizedPoints.points.map(point => new LatLng(point.latitude, point.longitude));4.获取轨迹颜色数组
使用PathGradientTool根据速度为轨迹点生成颜色数组:
typescript
// 获取轨迹颜色数组
const colors = PathGradientTool.getPathColors(optimizedPoints.sources, 100);5.绘制轨迹线
将轨迹点和颜色数组传递给地图组件,绘制轨迹线:
typescript
if (this.trackPoints.length > 0) {
// 设置地图中心点为第一个点
this.mapController.setMapCenter({
lat: this.trackPoints[0].lat,
lng: this.trackPoints[0].lng
}, 15);
// 创建轨迹线
this.polyline = new Polyline({
points: this.trackPoints,
width: 5,
join: SysEnum.LineJoinType.ROUND,
cap: SysEnum.LineCapType.ROUND,
isGradient: true,
colorList: colors
});
// 将轨迹线添加到地图上
this.mapController.addOverlay(this.polyline);
}三、代码核心点梳理
1.轨迹颜色计算
PathGradientTool根据速度区间为轨迹点分配颜色。速度越快,颜色越接近青色;速度越慢,颜色越接近红色。颜色的渐变通过getGradient方法实现。
2.轨迹优化
PathSmoothTool通过卡尔曼滤波算法对轨迹点进行滤波,减少噪声和冗余点。轨迹抽稀通过垂直距离阈值实现,减少轨迹点数量,提高绘制性能。
3.地图绘制
使用百度地图组件(如Polyline)绘制轨迹线,并通过colorList实现颜色渐变效果。地图中心点设置为轨迹的起点,确保轨迹完整显示。
四、总结与展望
通过上述步骤,我们成功实现了运动速度轨迹的绘制。轨迹颜色反映了速度变化,优化后的轨迹更加平滑且性能更优。